农业机械自动驾驶系统轨迹跟踪误差测试
2020-04-23 13:38莫中秋
无线电工程 2020年5期
万 豪,莫中秋,张 宇
(1.中国电子科技集团公司第五十四研究所,河北 石家庄 050081;2.中国卫星导航定位应用管理中心,北京 100088;3.西安卫星测控中心,陕西 西安 710043)
0 引言
随着北斗卫星导航系统[1]的全面建设以及导航技术的不断发展,卫星导航已经在各行各业应用中百花齐放[2]。中国作为农业大国,卫星导航在农业生产中已经取得了广泛应用[3],但农业机械的自动驾驶作业还处于初级阶段[4],目前国内已经出现一批自主研发的基于高精度GNSS定位的农业机械卫星导航自动驾驶产品[5],这些产品质量的优劣直接影响到自动驾驶系统的农业作业质量。
2018年,中国农业机械工业协会发布标准T/CAAMM 13-2018《农业机械卫星导航自动驾驶系统前装 通用技术条件》[6],轨迹跟踪误差[7]作为农业机械卫星导航自动驾驶系统的重要技术指标,是自动驾驶系统能否按照既定路线执行作业任务的重要保证,直接关系到作业质量和精度。
轨迹跟踪误差有2种表现形式:轨迹跟踪最大误差和轨迹跟踪平均误差。轨迹跟踪最大误差指在稳态轨迹跟踪阶段,作业机具中心点相对于当前导航线的横向偏移误差绝对值的最大值。轨迹跟踪平均误差指在稳态轨迹跟踪阶段,作业机具中心点相对于当前导航线的平均横向偏移误差的绝对值。
为了验证该标准提出的技术指标是否合理,测试方法是否可行,采用实车安装农业机械卫星导航自动驾驶系统对该指标进行测试和分析。
1 测试环境和样品选取
选取了2种测试场地:一种为平整、宽阔的水泥硬化场地,面积约150 m*80 m;一种为相对平整的农田地(如图1所示),倾斜度在3°以下,面积约160 m*50 m;前者用于测试轨迹跟踪性能指标,后者用于测试带机具状态下的作业性能指标。2种场地周围环视高度角10°以上均要求无障碍物遮挡,同时周围无明显影响测试的电磁干扰和机械振动。
测试场地附近具备标定的RTK基准位置(如图2所示)和数据通信链路,满足短基线场环境,标定的基准位置WGS84坐标分量绝对精度应优于0.01 m,相对测量精度优于1 mm。

图1 测试场地(农田地)

图2 RTK基准位置
测试样品选取了状态良好的拖拉机,装配有辅助自动驾驶系统,安装可靠、完成系统调试工作且各项指标正常,同时完成各种作业的农机具调试且技术状态良好。辅助驾驶系统为电动方向盘系列辅助驾驶系统设备。
2 测试过程及结果分析
2.1 测试方法及步骤
在试验场地内,启动自动驾驶系统直线行驶模式,拖拉机在行驶前,在自动驾驶系统显示界面上设置当前停放点为A点,使用高精度基准标定A点的三维坐标,起动拖拉机开始以2.0±0.2 m/s手动操作使其沿直线行驶约80 m后暂停,在显示界面上设置当前点为B点,同样使用高精度基准标定B点的三维坐标。
以A,B为端点、作业间距为2.4 m设置自动驾驶的导航线(一组平行线),将拖拉机手动掉头,使机头基本重合B点。点击显示界面上的自动驾驶按钮,拖拉机开始以4.0±0.2 m/s的速度从B行驶到A,实时记录高精度基准系统[8]采集的拖拉机实际轨迹点(数据采样率设置为10 Hz)。再次手动掉头后,同样启动自动驾驶,沿AB线相邻平行的另一条导航线行驶到B一侧,如此往复3次。
分别在水泥硬化场地、农田熟地不带机具和农田熟地带机具3种工况作业模式下,操作农机重复以上作业步骤,行驶轨迹如图3所示,各自统计轨迹跟踪误差,对结果进行统计及分析。
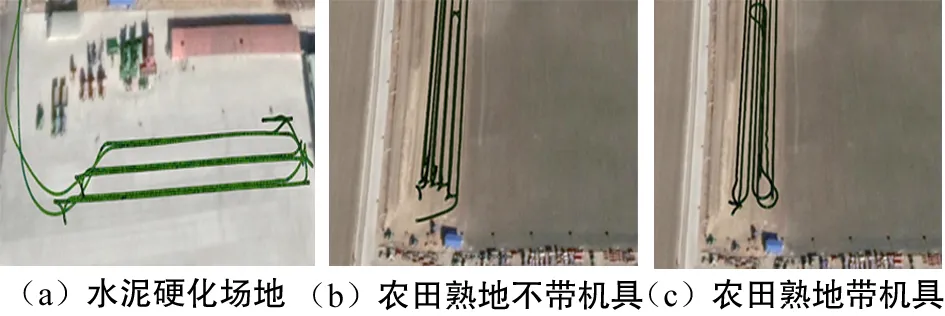
图3 行驶轨迹(Google地图)
2.2 测试结果统计及分析
作业轨迹数据采集以10 Hz数据刷新率在线存储,利用Novatel后处理软件Inertial Explorer 8.70(简称IE工具)进行紧耦合处理[9],最后输出符合NMEA-0183协议[10]的GGA文件。通过高精度基准系统标定的A,B点水平方向的坐标,确定直线方程ax+by+c=0。
选定水泥硬化场地、农田熟地不带机具和农田熟地带机具3种工况作业的稳定作业区段,行驶轨迹点采集如图4所示。

图4 行驶轨迹点采集
按式(1)计算实际采样点到AB直线的水平距离,并以不同统计方法统计各自直线轨迹跟踪偏差,如图5所示。
(1)

图5 轨迹跟踪误差统计图
由统计结果不难看出,水泥硬化场地中拖拉机的轨迹跟踪平均误差能满足标准要求,但随着拖拉机行驶,轨迹存在逐渐偏离的趋势。相比硬化区域,农田熟地不带机具的轨迹跟踪平均误差明显变大,均方根误差也变大,难以满足标准上的要求。带机具之后,轨迹跟踪误差相比不带机具,也有增大趋势。轨迹跟踪误差测试结果如表1所示。
表1 轨迹跟踪误差测试结果
Tab.1 Test results of trajectory tracking error

统计方法轨迹跟踪误差/m水泥硬化场地农田熟地不带机具农田熟地带机具平均值(Mean)0.022 700.051 810.087 09均方根值(RMS)0.012 220.050 740.020 35最大值(MAX)0.049 010.171 570.126 902倍标准差(2σ)0.044 270.149 490.118 66
3 测试问题分析及措施
3.1 导航线
按一般使用情况,农机自动辅助驾驶系统在规划第1条作业航线时,起点和终点都采用实时获取的方式(而非标定输入),也就是说,导航线2个端点一般按实时采集位置的均值获得,位置精度与采集时间的长短关系较大,经实际验证,推荐起点和终端的采集时间在10 min以上。
3.2 测量设备天线安装
轮式拖拉机上安装自动驾驶系统时,一般为测向的需要,导航主从天线常安装于机头两侧,而以主天线获取的实时位置确定前航线端点,该端点并非农机作业的行驶中心。检测过程中如果以此为基准计算作业轨迹跟踪误差,就会人为地引入计算误差,在实际检测时,应将端点和行使中心之间的固定距离进行测算,并消除该固定值。
3.3 作业边界
标准中要求农机轨迹跟踪平均误差为2.5 cm,测试中如果采用人工测量的方法,则对作业边界的目测识别提出了极高要求,而在农田熟地中作业边界难以有识别基准的情况下,会引入厘米级以上的测量误差[11]。准确测量的方法是使用自动化的轨迹采集系统和配套的数据后处理工具。
3.4 检测基准
轨迹跟踪平均误差2.5 cm也对测量的仪器设备精度提出较为严格的要求。按目前导航产品技术发展现状,实时动态RTK定位精度的最优值为±(10+1×D) mm(静态环境可以满足6~8 mm、相对精度可以满足3~5 mm),同时实时动态RTK[12]定位精度值与基线长度、当前载体速度和周围环境等因素关系密切。所以检测基准的选取不当,对轨迹跟踪误差的测量精度会造成影响。
检测基准最佳的选择是高精度组合导航系统[13]和先进IE后处理技术。组合导航系统中利用紧耦合技术,既能保证在GNSS系统不可靠的情况下利用惯导数据不间断得到高精度位姿信息,又能保证在惯性导航系统[14]误差变大时,利用GNSS对惯导系统进行修正来持续输出高精度位置信息[15],在工况条件不好或受干扰的情况下确保数据的可靠性和连续性。
IE后处理技术是利用动态后处理差分(Post-Processing-Kinematic,PPK)技术[16],相比实时RTK技术,其在处理中使用了精密星历[17],利用了低速平滑技术,消除了差分链路的误差,同时利用同周期历元处理[18]的算法提高了位置解的固定率。使得其位置精度比实时RTK高出1/3以上。更为重要的是,它在数据更新率上,有更多的选择性,能满足各种动态速度的要求。
3.5 检测场地
轮式拖拉机辅助自动驾驶系统在检测中需要的场地相对比较简单,只要面积、平整度符合要求的农田熟地即可,同时熟地周围不应存在林荫、高山和湖面,不需要过多的场地专业建设。目前高精度组合导航系统已具备便携设备,在测量精度和可靠性方面也完全可以保证,测试场地的高精度基准位置标定技术[19]也已成熟,只需携带测试设备和配套的工装等就可赴现场测试,从根本上解决对检测场地的过分依赖问题和整机长途跋涉的困境。
4 结束语
对农业机械卫星导航自动驾驶系统的轨迹跟踪误差指标进行了实际测量与分析,水泥硬化场地中,拖拉机的轨迹跟踪平均误差能满足标准要求,而农田熟地中的轨迹跟踪偏差却难以满足标准上的要求。同时,对测试中存在的问题进行了分析,并给出了应采取的相应措施。下一步,将针对T/CAAMM 13-2018《农业机械卫星导航自动驾驶系统前装通用技术条件》标准的轨迹跟踪误差指标要求及测试方法进行讨论分析。
猜你喜欢
科学家(2022年3期)2022-04-11
蜜蜂杂志(2021年10期)2021-12-06
蜜蜂杂志(2021年11期)2021-02-18
今日农业(2020年19期)2020-11-06
好日子(下旬)(2020年6期)2020-08-04
商品与质量(2019年37期)2019-11-28
电子制作(2018年17期)2018-09-28
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
劳动保护(2018年8期)2018-09-12