
融合雷达和视频的目标检测系统
2020-04-23 01:22:30时亚丽唐亮
电子技术与软件工程 2020年5期
时亚丽 唐亮
(1.中国电子科技集团第三十八研究所 安徽省合肥市 230088)
(2.安徽省公共安全应急信息技术重点实验室 安徽省合肥市 230088)
1 引言
周界防护主要是能够有效地探测非法入侵,一旦发生警情,能第一时间上传报警信息到指挥中心,配合必要的人防、物防手段,实现全天候全方位预测预警。传统的周界防护方案主要有红外对射、感应电缆、电子围栏等。红外对射方案误报率较高,无法识别外部扰动引起的报警,气候影响较大,雨雪、大风、雾霾均可能造成系统误报。感应电缆误报率较高,对于快速越过无法预警。电子围栏方案只有人员触碰才会报警,识别能力差;误报率高,不能识别小动物等的触碰;可靠性差,大量布设时平均故障时间迅速提高。
基于雷达和视频融合的目标检测系统是一种新型的周界防护手段,能够实现监控范围内移动目标的实时监控,自动跟踪其运动轨迹并记录,识别出可疑目标并实时报警,并且系统不受夜间、雨雪雾等恶劣天气影响。系统具有识别准确率高、误报率低、自动化程度高、使用限制少、可探测目标种类多等特点。
2 系统设计
融合雷达和视频的目标检测系统结合了雷达跟踪目标多、光电探测细节丰富、探测范围广的优势,采用深度学习算法对目标智能识别和确认,有效的降低了误报率,提高了识别准确率。系统主要包括相控阵警戒雷达探测终端、计算机网络及布线、后端服务器及报警管理系统,网络拓扑结构如图1 所示。
系统的探测终端设备主要包含相控阵警戒雷达、高清夜视相机和一体化支架。相控阵警戒雷达通过电磁波对周界防区进行实时扫描,并结合MIMO、数字波束形成等技术,对防区内目标的距离、速度、角度进行精准测量,有效探测距离达到120m,定位精度达0.5m。高清夜视相机,采用星光级超低照度低功耗的全高清网络摄像机,红外补光距离达100 米,和雷达联动拍摄目标视频图像。一体化支架包括防水防尘控制箱、声光报警设备、开关电源、光交换机等等配件。机动性强,安装维护方便,支持网络和光纤接入,易部署。系统采用光纤网络作为系统的承载网络,网络采用星型以太网结构,从指挥中心核心交换机到前端设备之间为1000M 以太网,所有监控视频及报警数据都通过以太网进行传输。
当有目标进入警戒区时,监视雷达自动记录目标的坐标、距离和速度,并触发相机抓拍一张图片,然后将图片送给分析服务进行目标识别,当确认目标为可疑目标后,保存目标图片和告警信息,并发出告警信号进行声光报警。

图1:系统网络拓扑结构图
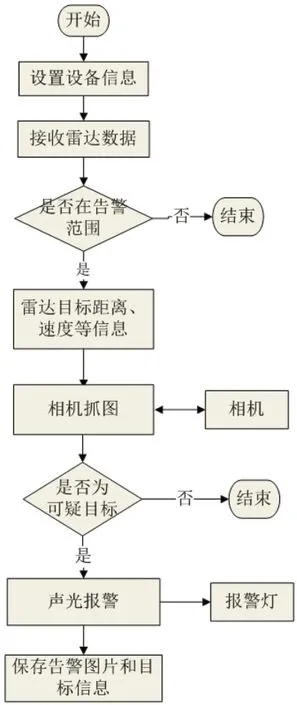
图2:系统流程图
3 系统设计
3.1 系统软件
系统软件的流程图如图2 所示:首先开始系统初始化,增加雷达、相机、报警器设备信息,设置雷达和相机的警戒区域和排除区域。然后启动雷达和相机数据接收,当雷达发现目标时进行判断,如果目标不在告警范围则不进行处理,如果目标在告警范围,保存雷达监测到的目标距离、速度等信息并启动相机抓拍。然后调用目标检测算法对图片进行目标识别和确认,查看是否为可疑目标,如果不是可疑目标则不进行处理,如果是可疑目标,则控制声光报警器进行报警,并保存告警图片和目标信息。
系统软件主要包括五个模块,即告警监控首页,报警结果查看,雷达设置,摄像头设置和配置项设置模块。软件具体功能如下:
3.1.1 设备信息设置
监控终端设备包括雷达和相机,软件可以对设备信息进行添加、查看、修改、删除,可以设置单个设备的警戒区域和排除区域。警戒区域是指需要布放的监控区域,排除区域是指不进行防控的区域,只有进入警戒区域的目标才会进行捕获和报警。
3.1.2 参数配置
软件可以灵活配置报警器开关、音量、报警间隔、设备状态监控间隔、报警信息保存地址等信息。
3.1.3 告警信息实时查看
在告警监控首页,可以添加需要实时监控的雷达设备,当有告警信息出现时,雷达地图画面中所属的雷达点位颜色变红并进行语音提示,同时与雷达关联的远景和近景相机显示实时视频,方便用户第一时间获取报警点位信息并发现可疑目标。告警列表中显示最近的几条告警记录供用户查看。查看的告警图片信息如图3 所示:红色虚线框为设置的警戒区域,在警戒区域的目标使用红框表示,不在警戒区域的目标使用蓝框表示,只有当一张图片中至少有一个目标出现在警戒区域时才会告警并保存告警信息。
3.1.4 历史记录查询
在告警结果查看页面,设置起始时间、结束时间、报警雷达等查询条件,可以查看历史告警记录,告警结果列表如图4 所示。
3.2 目标检测算法设计
由于动物和树枝等的活动引起的外部干扰信号,只依靠雷达检测仍然包含一些误报。通过引入目标确认算法,可以消除雷达探测到的虚假警报,进一步提高预警准确性。目标检测算法在后端分析服务器中实现。与传统的特征提取方法相比,深度卷积神经网络可以模拟人的大脑,通过持续学习,自动从图像中提取出深层特征,不仅避免了复杂的特征设计步骤,而且具有强大的概括性。基于深度卷积神经网络的目标检测算法在图像分类和识别上取得了质的提高。
卷积神经网络CNN 是一种深度前馈人工神经网络,它主要由卷积层、池化层和全连接层组成。CNN 的卷积层和池化层配合,可以构成多个卷积组,然后逐层提取目标特征,最后通过若干个全连接层完成分类。卷积神经网络CNN 将数据量很大的图像识别问题不断降维,最终使其可以拿来训练。其中卷积层所做的操作,可以当成是受局部感受野,而池化层的目的,则主要为了降低数据的维度。CNN 通过卷积来模拟特征区分,并且通过卷积的权值共享及池化,来降低网络参数的数量级,最后通过传统神经网络完成分类等任务。
4 结语

图3:告警图片

图4:告警结果列表
针对现有周界安防产品的高误报率影响实际使用效果,受雨雪雾天气影响大、无法进行目标分类等问题,本文提出了一种新型的融合雷达和视频的目标检测系统,系统综合分析雷达和视频两种信号,采用深度学习算法将人工智能技术引入要地防护,集监视雷达、光电成像设备于一体,能够全天候大范围的实时监控移动目标,自动跟踪其运动轨迹并记录,识别出可疑目标后实时报警,全面降低了周界入侵探测的误报率,能够广泛应用于监狱、派出所、铁路、机场等各种重要的周界防护场所。
猜你喜欢
电子产品世界(2023年10期)2023-12-21 11:59:21
计算技术与自动化(2023年3期)2023-10-16 19:12:26
煤气与热力(2021年6期)2021-07-28 07:21:40
水上消防(2020年3期)2020-07-25 02:36:20
铁道通信信号(2019年7期)2019-10-08 08:38:12
小哥白尼(军事科学)(2018年9期)2018-12-08 08:18:44
小哥白尼(军事科学)(2018年8期)2018-09-12 02:07:56
小哥白尼(军事科学)(2018年6期)2018-09-10 05:56:24
小哥白尼(军事科学)(2018年1期)2018-05-25 02:24:52
铁道通信信号(2018年3期)2018-04-19 02:32:48
