一种基于超级电容快速充电的循迹小车设计
2020-04-22 20:37纪鑫哲叶尔深·艾尔肯叶博远张海楠金平
无线互联科技 2020年4期
纪鑫哲 叶尔深·艾尔肯 叶博远 张海楠 金平

摘 要:文章利用MSP430F149单片机、TPS63020芯片、TCRT5000红外传感器、无线充电模块、计时控制电路、自启动电路、DC?DC模块和直流电机等模块设计并制作了一个可循迹的电动小车动态无线充电系统,可通过灯光显示是否处于充电状态,小车检测到发射线圈停止工作时可自行启动,并在行驶期间实现动态充电,设计了电容“快充慢放”电路,能够完成预期功能,在电能输出效率最优情况下沿引导线稳定行驶。
关键词:动态无线充电;小车;循迹;MSP430F149单片机;TCRT5000红外传感器;超级电容;快充慢放
近年来,电动汽车以其对环境影响小、绿色等优点而走进人们的生活。特斯拉等公司已经在电动汽车领域取得了喜人的成绩;美国麻省理工学院首次提出了通过电磁谐振耦合的方式进行无线电能传输,在传输距离为2 m的条件下,系统的传输效率可达40%[1]。国内多个研究团队通过建模与仿真等方法验证了电磁谐振耦合方式与发射接收端距离有关[2]。超级电容器功的率密度大,充放电时间短,大电流充放电特性好、使用寿命长、低温特性优于蓄电池等优异的性能使其在电动车上有很好的应用前景[3]。本文从实践出发,在理论分析的基础上搭建了一个实物模型,为电动汽车智能化的发展作了初步的探索。
1 系统总体方案
基于MSP430F149单片机控制的动态无线充电小车,充电定时显示模块采用单片机编程控制,在IAR软件环境下编译调试完成各部分模块功能。系统总体方案框架如图1所示,充电时,自启动电路各个模块功能实现如下:
(1)无线充电模块。采用XKT412与T3168芯片。XKT412无线充电模块电路简单,在5 V/1 A的电源下可以获取的最大充电电流>0.85 A,电能利用率极高。电源发射和小车接收是通过磁共振进行能量传输的,当发射端和接收端频率一致时会产生共振,传输电能。通过测得实验数据可得,当充电线圈和接收线圈间隔为2~3 mm时,XKT412无线充电模块的电能利用率在>85%以上,电能利用率极高[4]。其中,发射模块工作电流可以随接收负载电流的大小自动增减,保证充电质量。
(2)储能模块。选择5.5 V/15 F超级电容,提高系统能量储备。
(3)DC-DC转换。选用TPS63020,将线圈采集到的交变电流转换为直流电,经滤波之后给电容充电。
(4)供电模块。电机由电容放电直接驱动,通过MOS管来控制电机的起停。通过DC-DC模块将电容电压转换为恒定的3.3 V,给单片机供电。
2 方案比较和选择
(1)驱动电机方案选择:选择N20直流减速电机额定电压6 V,能耗低,性能优越,经过实际测试,在电压0.5 V,电流0.04 A时,依然能够工作。减速齿轮组功率转换在95%以上,節约空间,牢靠耐用,因此选择N20直流减速电机。
(2)小车方案选择:设计小车车体为三轮小车,小车采用两轮驱动,两轮各用一个直流电机控制,前轮为万向轮。耗费电量速度慢,方向容易改变,更容易完成复杂循迹任务[5]。
(3)自启动方案选择:自行设计低功耗的自启动电路利用二极管和PNP三极管自行设计低功耗的自启动电路。三极管采用PNP型三极管,功耗主要取决于工作电流与工作电压。
(4)充电方案选择:根据所选择的超级电容的充电特性,应该先进行恒流限压充电,提高充电速度,在达到控制电压后改用恒压充电,在充电结束前实现小电流充电,既保证充满,又可以避免超级电容器内部高温而影响超级电容器的容量特性。
(5)电容选择:储能模块选用了5.5 V的超级电容,实现电池充放电的性能。超级电容本身原理与普通电容相似,优点在于充电速度快、能量转换效率高、过程损失小、能量循环效率≥90%、安全系数高以及容量大,不仅轻便耐用,而且绿色环保。
(6)定时自启动方案:通过MSP430计时60 s并控制继电器开关,单片机给一个低电平信号,继电器2,3口接通,继电器为常闭状态,此时端口输出电压。当计时达到 60 s,单片机给一个高电平信号,继电器3口产生磁场吸合衔铁,2,3口闭合,电源无输出。
3 理论分析与计算
(1)超级电容容量的计算。电容的储能公式:E=1/2CU2,其中,E为电容能量,C为电容容量,U为电容电压。(2)电容放电从U始到U末所释放出的能量:△W=1/2CU始2-1/2CU末2。(3)放电过程维持恒定电路I:Q=It;U(t)=U始-Q/C。(4)能量积分可得:C2(U始2-U末2)-2U始ItC+I2t2。(5)小车行驶消耗能量:W=μMgS,其中,μ为摩擦系数,M为车身质量,g为重力加速度,S为小车行驶距离。(6)系统内部能量利用率:η=W/△W。
4 系统效率分析计算与电路设计
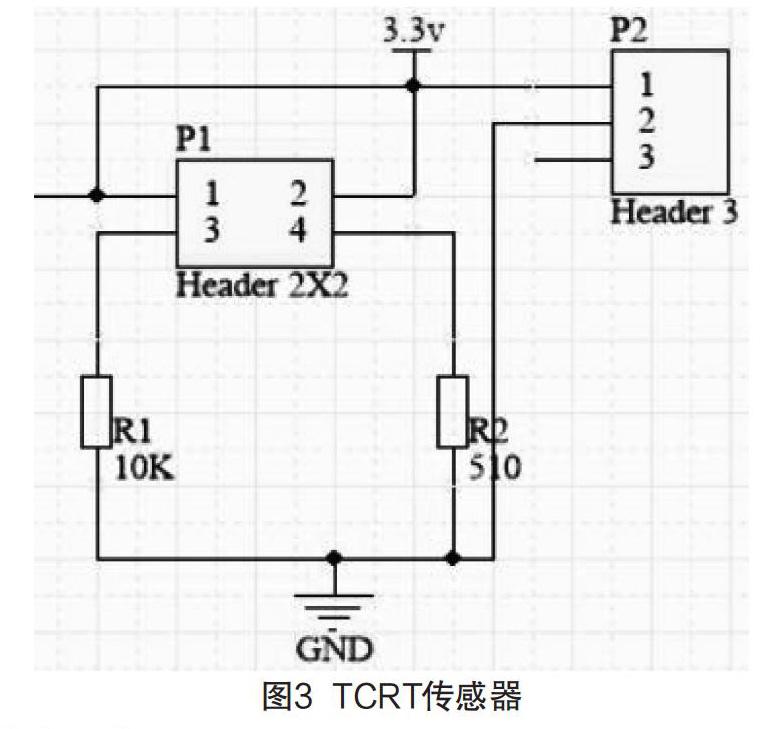
首先,选择高效率充电方式,该电路可以快速为超级电容充电,充电结束后与自启动电路相连,超级电容放电,在放电过程中电流稳定,放电持续性强。可以根据不同的充电要求选择不同的电路参数。为了使电路获得更高的品质,二极管选用肖特基二极管,线路中各类附加电阻尽可能小,控制电机选用MOS管。其次,降低各种损耗例如给电机减速齿轮组涂润滑油减小机械损耗,车身材质采用亚克力板制作,减小车身重量,尽量选用功耗更低的三极管(或MOS管),减小漏电流等方式来降低损耗。电容充放电电路如图2所示。
超级电容充放电时间常数部分设计使得本电路超级电容具有“快充慢放”性能,其中,充电电阻为线圈电源的输出电阻记为R入,放电电阻为开关管与电机电阻之和记为R出。P63口的电压可以反映超级电容充电水平:
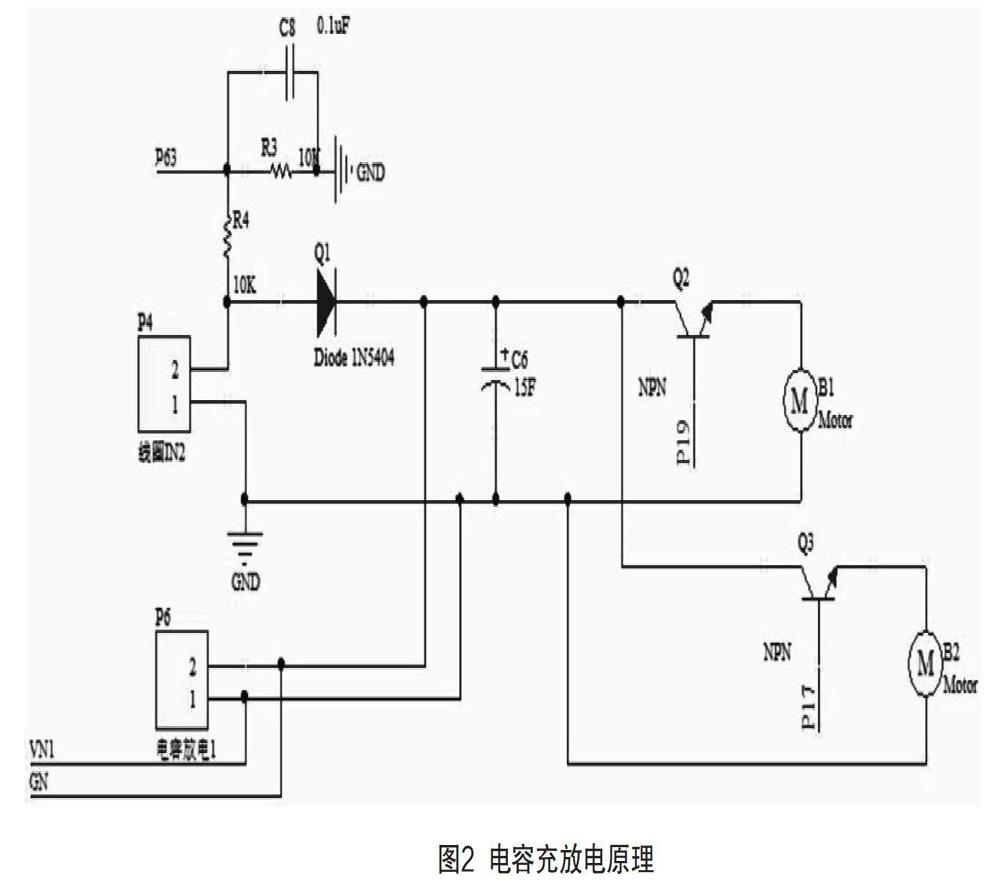
循迹模块采用现成的TCRT5000传感器,其红外发射二极管不断发射红外线,当发射的红外线没有被反射回来或者反射回的强度不够大时,红外接收管一直处于关闭状态,此时3脚的电压低于2脚的电压,输出为高电平,LED1为熄灭状态;当红外反射强度足够且被接收到时,3脚的电压大于2脚的电压,输出为低电平,LED1为点亮状态。TCRT传感器如图3所示。
5 性能测试
(1)充电完成测试,检测充电是否结束,采用在整流滤波的前面(一端接地一段接电磁线圈)串联一个采样电阻,当电阻上的电压不再变化,说明此时已经停止充电,即将发车前进。小车放置在起点(A点),接通电源开始充电后检测红灯和蓝灯是否同时亮,显示正处于充电状态,充电完成;蓝灯灭,仅红灯亮,表示充电完成。(2)检测小车放置在A点,接通电源充电,红灯和蓝灯是否被同时点亮,计时器开始计时,60 s时断开电源,检测蓝灯是否灭,小车检测到发射线圈停止工作自行起动,检测小车是否沿引导线行驶至B点(1/4圆周)后自动停车。(3)在和(2)相同条件下,小车检测到发射线圈停止工作自行起动,沿引导线行驶直至停车。测量小车行驶距离L1。(4)测试开始充电时,是否红灯和蓝灯同时亮,充电完成时,是否只有红灯亮,开始充电60 s后小车自起动,行驶途中到达充电位置,红灯和蓝灯同时亮,即行驶途中动态充电,180 s时断开电源,根据轨道刻度测量行驶距离L2,計算L=L2-L1。(5)根据公式WCU2,计算出初始电能W,计算K=L2/W。
6 测试结果
本系统可以完成上述所有测试。测试三的行驶距离L1,部分测试数据如表1所示。
7 结语
本文介绍了可以基于超级电容快速充电的可自动循迹小车的设计方案,通过优化小车的机械结构,设计快充慢放的电路,达到了高效利用电能的目的,在性能测试中,小车一直保持稳定表现出了优越的实用品质,在一定程度上为电动汽车充电方式的智能化发展提供了借鉴。
[参考文献]
[1]谭菊华,李晓芳,郭小春.磁耦合谐振式电动汽车[J].沈阳工业大学学报,2020(1):11-12.
[2]李伟勇,刘伟黄,栢淇,等.基于磁耦合谐振式电动汽车无线充电方案研究[J].电子设计工程,2019(12):173-175.
[3]叶佳虹,罗婉婷,张瑞怡,等.超级电容模组在无线充电小车中的应用[J].电工技术,2019(6):132-134.
[4]魏文强,庄晓东.基于单片机的无线充电自启动系统设计[J].电子元件与信息技术,2018(12):7-10.
[5]王立刚.智能小车动态无线充电系统[J].内燃机与配件,2019(18):35.
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
电子测试(2018年15期)2018-09-26
电子制作(2018年8期)2018-06-26
电子制作(2017年1期)2017-05-17
电子制作(2016年11期)2016-11-07