前后轴双电机电动汽车转矩分配优化策略
2020-04-22 06:00漆星王群京陈龙操进张倩李国丽
电机与控制学报 2020年3期
漆星 王群京 陈龙 操进 张倩 李国丽


摘 要:针对前后轴双电机电动汽车的效率提升问题,在对前后轴双电机方案效率特性研究的基础上,设计了基于电机效率最优和基于电池效率最优的前后轮双电机转矩分配方法。研究发现这两种效率最优的方法在转矩分配上存在冲突现象,因此,采用一种多目标粒子群优化算法求得同时兼顾电机效率和电池效率的最优策略,从而避免两种策略同时工作时出现的竞争现象。仿真和实验结果表明,采用多目标粒子群优化算法的前后轴双电机转矩分配方案可以提高电动汽车的系统效率和续航里程。整车动力学分析表明,采用多目标粒子群优化算法的前后轴双电机转矩分配方案不会对整车的稳定性和平顺性产生影响。
关键词:分布式驱动;前后轴双电机;效率最优;转矩分配;多目标粒子群算法
DOI:10.15938/j.emc.2020.03.008
中图分类号:TM 315文献标志码:A文章编号:1007-449X(2020)03-0062-09
Abstract:The promotion of front and rear independent drive strategy efficiency is discussed, and two efficiencyoptimized of front and rear motor torque distribution strategies are proposed, which concern not only the motor but also the battery′s efficiency. Meanwhile, a multiobjective particle swarm optimization was used to make sure both of the above efficiencyoptimized strategies work without conflict. The multiobjective particle swarm optimization strategy was verified both in simulation and experiment, and the results show that the proposed strategy can improve electrical vehicles efficiency and endurance mileage. Also, the vehicle dynamics analysis shows that the proposed strategy will not affect the stability and smoothness of the vehicle.
Keywords:distributed electrical vehicle drive; front and rear independently drive; efficiencyoptimized; torque distribution; multiobjective particle swarm optimization
0 引 言
隨着中国经济持续稳定的增长,汽车保有量也在不断上升,但也导致了一系列污染和环境的问题,而电动汽车的发展,可以有效的解决上述问题。相对于传统车的集中驱动方式,电动汽车采用电机驱动,具有结构紧凑,响应迅速,控制精确度高等特点,并且可以采取多个电机配置的分布式驱动方式。相对于单电机驱动方式而言,分布式驱动方式可以增强电动汽车的驱动力和地面附着力,同时,通过对多个电机的分别控制可以提高整车的行驶自由度,因此在近年来受到了学者们的关注。在分布式驱动中,由于电机个数较多,需要合理的设计电机运行策略,使所有电机尽量都运行于高效区。余卓平等[1]提出了基于轮毂电机效率最优的转矩分配优化策略,并对其进行驾驶循环工况的模拟仿真,仿真结果表明可将总体能效提高3个百分点。邹广才等[2]为改善四轮独立驱动电动车辆的动力学特性,提出一种纵向力优化方法,基于模糊理论设计了以质心侧偏角为权重的多目标优化条件,从而提高了整车的稳定性和操纵性。欧阳明高等[3]提出了基于永磁无刷轮毂电机损耗最优模型的转矩分配策略,并进行了仿真和实验验证。续丹等[4]考虑到不同的驾驶需求,提出了经济性、稳定性等多个目标函数,并对此进行优化。
然而,现有的文献中,大多仅仅针对电机的效率进行优化,并未考虑到电池的效率。例如,Yuan Xibo[5]和J.Kim[6]基于电机的总损耗最小原则,对不同结构的分布式驱动电机转矩分配策略进行了研究。事实上,整车的效率和续航里程不仅和电机的效率相关,同时也和电池的效率相关。在分布式驱动方案效率优化中,不仅要考虑电机的总体效率,同时也要考虑电池的效率。鉴于此,本文设计了一种前后轴双电机的分布式驱动方案(front and rear independently drive,FRID),在此基础上论证了基于电机效率最优的转矩分配策略和基于电池效率最优的转矩分配策略,进而针对上述两种策略的竞争冲突现象,研究了一种多目标粒子群优化算法,实现了电机与电池的总体效率最优,从而达到降低系统能耗,增加续航里程的要求。
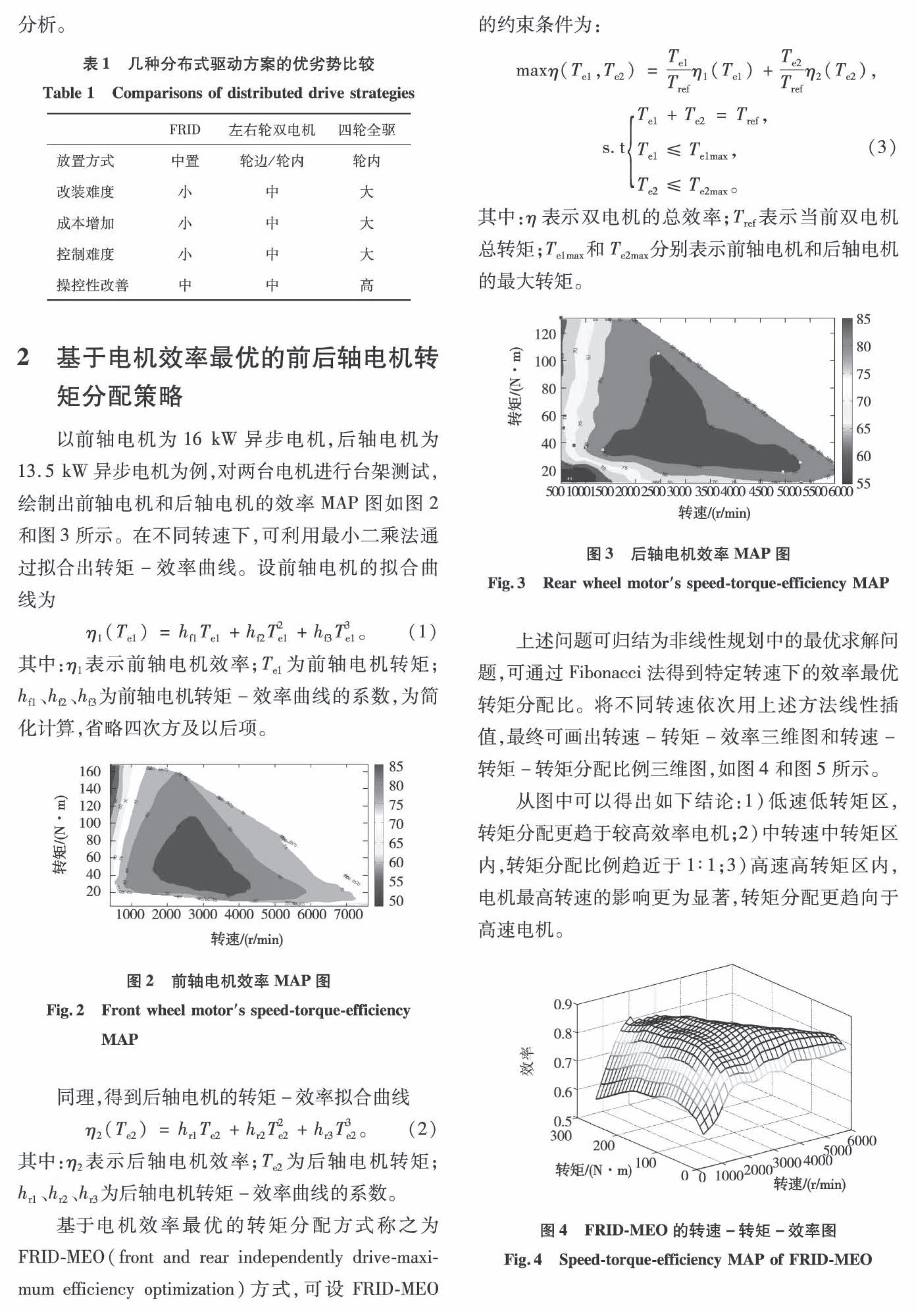
1 前后轴双电机驱动方案
1.1 分布式驱动方案
分布式驱动方案根据电机个数的不同具有多种结构设计。双电机左右轮驱动方案结构图1(a)、图1(b)所示,通过安装在前(后)轮上的两台电机进行驱动,并进行电子差速控制,从而使整车获得转向稳定性[7-8]。另一种四轮驱动方案如图1(c)所示,4个车轮均加装轮毂电机,可以实现四轮独立驱动[9-10]。
6 结 论
分布式驱动电动汽车方案充分利用了电驱动系统的灵活性,几年来受到学者们的关注。在所有的分布式驱动方案中,前后轴双电机方案在成本,改装难度上较其他分布式驱动方案更具优势,更适合于现阶段的开发。在前后轴双电机的分布式驱动方案中,前后轴电机的转矩分配策略是研究的关键问题,特别是基于整体效率和续航里程提升的前后轴电机转矩分配方案近年来更是电动汽车发展的难点和重点问题。基于上述问题,本文所做的工作有:
1)基于电机效率最优,设计了双电机效率最优转矩分配方案,尽可能将电机运行工况均配置在高效区内,从而减少电机损耗。
2)基于电池效率最优,设计了双电机最大转矩/电流比转矩分配策略,使得单位转矩所消耗的电流最小,从而使电池效率尽可能提高。从而提高续航里程。
3)设计了一种多目标优化方案,有效解决了上述两种策略的竞争问题,实现整体效率的优化。为分布式驱动电动汽车的效率优化策略提供了新的思路。
参 考 文 献:
[1] 余卓平, 张立军, 熊璐. 四驱电动车经济性改善的最优转矩分配控制[J]. 同济大学学报:自然科学版, 2005, 33(10):1355.
YU Zhuoping, ZHANG Lijun, XIONG Lu .Optimal torque distribution control for economic improvement of four wheel drive electric vehicle[J].Journal of Tongji University;Natural Science Edition, 2005, 33(10):1355.
[2] 邹广才, 罗禹贡, 李克强. 四轮独立电驱动车辆全轮纵向力优化分配方法[J]. 清华大学学报:自然科学版, 2009(5):719.
ZHOU Guangcai, LUO Yuguan, LI Keqiang. Optimal allocation method for all wheel longitudinal force of four wheeled independent electric drive vehicle[J]. Journal of Qinghua University;Natural Science Edition,2009(5):719.
[3] 卢东斌, 欧阳明高, 谷靖,等. 四轮驱动电动汽车永磁无刷轮毂电机转矩分配[J]. 清华大学学报自然科学版, 2012(4):451.
LU Dongbin, OUYANG Minggao, GU Jing, et al. Torque distribution of permanent magnet brushless hub motor for fourwheel drive electric vehicle[J] Journal of Qinghua University; Natural Science Edition,2012(4):451.
[4] 续丹, 王国栋, 曹秉刚,等. 独立驱动电动汽车的转矩优化分配策略研究[J]. 西安交通大学学报, 2012, 46(3):42.
XU Dan, WANG Guodong, CAO Binggang, et al. Research on torque optimal allocation strategy of independent drive electric vehicle[J] Journal of Xi'an Jiao Tong University,2012, 46(3):42.
[5] YUAN X, WANG J. Torque distribution strategy for a frontand rearwheeldriven electric vehicle[J]. IEEE Transactions on Vehicular Technology, 2012, 61(8):3365.
[6] KIM J. Optimal power distribution of front and rear motors for minimizing energy consumption of 4wheeldrive electric vehicles[J].International Journal of Automotive Technology,2016,17(2):319.
[7] NOVELLIS L D, SORNIOTTI A,GRUBER P,et al. Comparison of feedback control techniques for torquevectoring control of fully electric vehicles[J]. IEEE Transactions on Vehicular Technology, 2014, 63(8):3612
[8] 熊璐, 余卓平, 姜炜. 基于纵向力分配的轮边驱动电动汽车稳定性控制[J]. 同济大学学报:自然科学版, 2010, 38(3):417.
XIONG Lu, YU Zhuoping, Jiang Wei. Stability control of wheel drive electric vehicle based on longitudinal force distribution[J]. Journal of Tongji University: Natural Science Edition,2010, 38(3):417.
[9] OSBORN R P,SHIM T.Independent control of allwheeldrive torque distribution [J]. Vehicle System Dynamics,2006, 44(7):529.
[10] KANG J, KYONGSU Y, HEO H. Control allocation based cptimal torque vectoring for 4WD electric vehicle[J].SAE Technical Paper series:2012-01-0246.
[11] MUTOH N,KAZAMA T,TAKITA K.Driving characteristics of an electric vehicle system with independently driven front and rear wheels [J]. IEEE Transactions on Industrial Electronics, 2006, 53(3):803.
[12] MUTOH N.Driving and braking torque distribution methods for front and rearwheelindependent drivetype electric vehicles on roads with low friction coefficient[J]. IEEE Transactions on Industrial Electronics, 2012, 59(10):3919.
[13] 黄万友,程勇.变工况下电动汽车驱动系统效率优化控制[J].电机与控制学报,2012,16(3):53.
HUANG Wanyou, CHENG Yong. Optimization control of electric vehicle drive system efficiency under variable conditions [J]. Electric Machines and Control,2012,16(3): 53.
[14] 熊璐, 陈晨, 冯源. 基于Carsim/Simulink联合仿真的分布式驱动电动汽车建模[J]. 系統仿真学报, 2014, 26(5):1143.
XIONG Lu, CHEN Chen, FENG Yuan.Modeling of distributed drive electric vehicle based on cosimulation of Carsim and Simulink[J]Journal of System Simulation,2014, 26(5):1143.
(编辑:贾志超)