
自动铺瓷砖机的设计
2020-04-22 04:45吕海霆陈超峰董淑婧
机械制造 2020年4期
□ 吕海霆 □ 弓 宸 □ 陈超峰 □ 董淑婧
大连科技学院 机械工程学院 辽宁大连 116052
1 设计背景
为解决建筑行业瓷砖铺设过程中操作人员体力消耗大、铺设精度不高且效率低下等问题[1],笔者设计了自动铺瓷砖机,并对结构进行优化整合,以达到高质、高效铺设瓷砖的目的。
2 结构
笔者设计的自动铺瓷砖机由六个系统组成。
(1) 安置系统。将瓷砖铺实,使瓷砖与水泥紧密接合,并使铺设的瓷砖无空鼓现象。
(2) 移动系统。将瓷砖移动至指定位置,要求定位精度尽可能高。
(3) 平衡系统。连接底盘系统和移动系统,使移动系统始终与铺设平面平行。
(4) 底盘系统。作为机械臂的安装主体与瓷砖的存放空间,同时完成瓷砖大小的测量。
(5) 自动化控制系统。输入程序,实现瓷砖的自动化铺设。
(6) 独立于车体之外的测量装置。用于对房间内铺设的瓷砖进行测量。
自动铺瓷砖机结构如图1所示。

3 工作原理
瓷砖铺设过程中,最重要的问题是如何确定瓷砖的位置,并且保证相邻瓷砖的位置关系[2]。要使机械臂确认瓷砖的位置和方向,需要在房间空间中建立坐标系。
自动铺瓷砖机通过各种传感器,对整个房间进行坐标系定义,进而通过算法,确定出所需要铺设的瓷砖相对于作为执行机构的机械臂的位置[3]。
自动铺瓷砖机通过一个独立于车体之外的测量装置,对房间进行平面定义,并且确定瓷砖铺设的最终平面高度,以及瓷砖本身的水平方向。
对于多边形瓷砖,将某一条边线作为水平方向,在铺设的最终位置,使该边线始终与测量装置定义的方向平行。通过安置在机械臂中心的测距装置,测量机械臂与相邻两墙壁的距离,即可获取机械臂中心位置相对于房间墙角的位置。通过底盘上的两对挡板,可以得到瓷砖各个边的长度。
对于正多边形瓷砖,仅需要获取一组特征尺寸,即可得到其外形。
通过以上方法,得到对房间建立坐标系的全部条件,再通过一些简单计算,即可得到全部瓷砖的相对位置。得到瓷砖的尺寸特征后,便可以确定瓷砖最终紧密接合的状态,即相对位置关系。通过瓷砖各个中点所定义的平面、高度及水平方向,可以定义瓷砖所处于的二维平面。通过位于车上的测距装置,可以确定整个平面的二维坐标原点[4]。
独立于车外的测量装置所建立的平面确保了瓷砖在X轴、Y轴方向的旋转自由度,所确定的最终高度限制了瓷砖Z轴方向的移动,所确定的平面方向限制了瓷砖Z轴方向的旋转。测量装置所测量的距离数据与算法所建立的瓷砖接合状态,确定了每块瓷砖X轴、Y轴方向的移动限制,至此,每块瓷砖的六个自由度均被完全确定。同时,测量装置可以获取机械臂中心的位置,这样机械臂的位置也被确定[5]。在机械臂和瓷砖位置全部被确定的情况下,根据机械臂的逆运动学原理,便可以获得机械臂将瓷砖从初始位置运送到所定义各位置的运动方式。为防止机械臂与墙壁产生碰撞,需要确定机械臂的工作区域,即仅对由墙角与测距装置所形成的平面内被定义的瓷砖进行铺设,如图2所示。

图2中,a为瓷砖的长度,b为瓷砖的宽度,l为机械臂与墙面在Y轴方向的距离,s为机械臂与墙面在X轴方向的距离。圆弧所覆盖的中心点为通过控制系统判定,移动系统可以确定移动到的位置。每块瓷砖铺设完成后,控制系统会对瓷砖位置进行记录,避免发生二次铺设。
测量装置及底盘系统测量所得的数据,通过控制系统进行相应计算、处理后,成为驱动移动系统移动的坐标数据。移动系统接收到此数据后,开始执行移动作业。当移动作业执行完成后,安置系统启动,完成最终的压实工作[6]。
4 安置系统
安置系统主要完成瓷砖吸附、放置、压紧、铺实的任务。在实际铺瓷砖过程中,通常是通过橡胶锤锤击的方式,使铺设的瓷砖无空鼓现象。
安置系统的结构如图3所示。安置系统的核心是一对偏心齿轮机构,电动机驱动其中的一个偏心齿轮轴,可以使系统内的下推板持续进行上下往复运动,从而可以对壳底的四个橡胶锤施加持续的敲击。橡胶锤的运动距离为1 mm,这样可以精确控制瓷砖铺设最终的平整程度[7]。
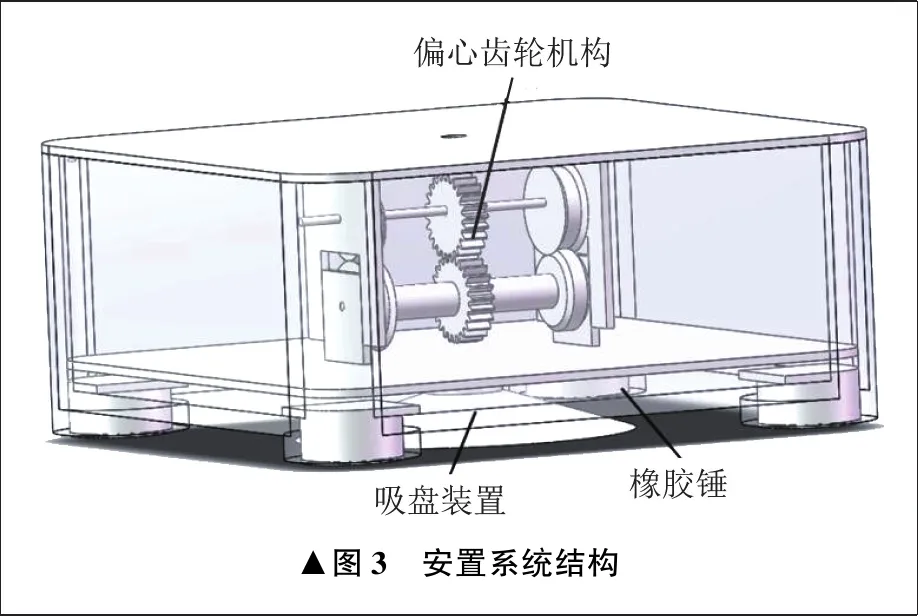
当安置系统缓慢向下推进时,橡胶锤会与瓷砖紧密接触。此时快速运动的下推板向下锤击橡胶锤,所产生的冲击力传导至瓷砖表面,从而产生一种近似于用橡胶锤均匀敲打瓷砖的效果,以达到瓷砖与铺设平面吸附紧密、无空鼓的要求。
5 平衡系统
瓷砖铺设现场的环境一般较为复杂,常见的铺设表面往往不是水平的,因此机械臂仅具备四个自由度,无法完成瓷砖平整铺设的任务。
基于以上分析,需要使机械臂处在一个始终与同一平面平行的平面中进行作业[8-9]。平衡系统的功能便是使机械臂所在的平面始终保持与测量装置确定的平面平行。
平衡系统的结构如图4所示,由平台、一组万向节、两个电动推杆、一个弹簧顶杆构成。电动推杆与弹簧顶杆所在的三个点不共线,因此可形成一个可被计算和控制的平面。只要使此平面与测量装置所确定的平面平行,便可以使移动系统的第一关节垂直于房间内的平面。

6 底盘系统
底盘系统主要分为车体和控制箱两部分。车体主要用于承载瓷砖。车体中间部分为储砖空间,采用可变形的挡板结构,可使储砖空间适应各种尺寸的瓷砖,扩大使用范围。底盘系统同时还可以测量所存放瓷砖的尺寸大小。
底盘系统外观如图5所示。

挡板结构采用连杆与槽销连接,通过槽销在槽中的运动带动与连杆相连的左右挡板运动。左右挡板横向移动,能放大和缩小储砖空间。前后挡板移动采用齿轮齿条传动,能使前后挡板运动速度一致。瓷砖始终被前后挡板定位在中心部分,以便机械臂进行取砖操作[10]。
在车体的底部有四个轮子,靠近推手的部分是两个万向轮,可以使车体灵活移动。车体前端部分有两个较大的承重轮,可以保证车体的稳定性,为机械臂提供稳定的工作环境。
车体的前端为控制箱,控制箱中的自动化控制系统主要用于机械臂控制与传感器信息处理。
基于处理后的传感器信息,自动铺瓷砖机可以判断自身在房间中所处的位置,机械臂在程序控制下进行铺砖操作。
7 结束语
笔者设计的自动铺瓷砖机由安置系统、移动系统、平衡系统共同构成主要执行机构。底盘系统作为主要承载设备,兼具测量装置的作用,与独立测量装置、车上测距装置共同组成测量系统。
自动铺瓷砖机的工作模式为,测量系统测量,得到高度、尺寸、距离等信息,发送至控制系统,经由程序计算,输出驱动信号,传递至各电动机,以此完成精确铺瓷砖。
自动铺瓷砖机的设计,解决了操作人员体力消耗大、工作效率不高的问题,值得推广。
猜你喜欢
中学生天地(A版)(2021年9期)2021-10-25
现代装饰(2019年10期)2019-10-17
小学生学习指导(中年级)(2018年4期)2018-09-06
小学生学习指导(中年级)(2018年3期)2018-01-25
发明与创新·大科技(2017年1期)2017-01-14
专用汽车(2016年12期)2016-02-11
山东工业技术(2014年20期)2014-10-21
小雪花·成长指南(2014年4期)2014-05-26
初中生世界·七年级(2014年2期)2014-03-24
铁道机车车辆(2012年4期)2012-11-27
