
激光雷达距离成像精度改进方法
2020-04-21 12:38王慧文孙晓娟姚伏元王恩泽
交通科技与经济 2020年2期
王慧文,孙晓娟,姚伏元,王恩泽
(1.黑龙江工程学院,黑龙江 哈尔滨 150050;2.黑龙江省建工集团有限责任公司,黑龙江 哈尔滨 150046;3.大众一汽平台零部件有限公司,天津 300450)
近年来,因成像激光雷达的高范围精度、宽范围门和高帧率而引起了极大的关注[1-3],在导航、大地测量、交通流测距和测速等方面应用前景广阔。激光作为扇形光束投射到视场中,在目标上形成条形激光脚点。散射的目标返回,通过相机镜头成像到光电阴极上并转换成电子。然后通过在光电阴极和屏幕之间施加的高电压将该电子流加速到荧光屏(阳极)上,通过一对具有时间相关电压的偏转板,使电子具有与偏转电压成比例的偏移,此时荧光屏的不同位置处的条形图像表示不同的回波时间,即目标距离。通常使用光纤耦合CCD捕获磷光图像[5-6],CCD图像的每列表示时间分辨通道,每行表示时隙。与多狭缝体制相比,单狭缝具有更宽的门限,具有相同的CCD分辨率,可以更有效地区分目标[7-10]。此外,单狭缝的简单结构有助于深入分析激光雷达特性,典型的回波信号模型如图1所示。
距离精度是成像激光雷达系统最重要的特征之一。据Gleckler等人报道[11-13],基于峰值检测算法的雷达系统测距误差为:

(1)
式中:σrange为测距误差;C为光速;τlaser表示激光器的脉冲宽度,即激光脉冲轮廓的半峰全宽(FWHM),SNR是单通道的信噪比。式(1)表明距离精度仅取决于激光脉冲轮廓和SNR。然而,根据峰值检测算法[12],峰值位置(即目标距离)由一个CCD通道的时间分辨信号分布决定,不仅与激光脉冲形状有关,而且与图像弥散效果有关。范围误差也与时间分辨信号的宽度成正比,包括模糊的影响。为了定量分析图像的模糊,应该引入静态模糊信号。当雷达在静态模式下工作时,静态模糊信号是一个CCD通道的强度分布,其中偏转电压等于指定值。本文建立了时间分辨信号分布模型,包括激光脉冲宽度和静态模糊宽度,并提出改进的范围精度分析方法。通过使用最佳静态模糊宽度,在室内和室外实验中分别对10 m和1 700 m的目标实现了0.06 m和0.25 m的测距精度。
1 理论分析
通常,脉冲宽度为FWHM的激光脉冲轮廓P(t)可以使用高斯分布近似[14],如式(2)所示。

(2)
式中:P0为激光峰值功率,它取决于总激光脉冲能量、到目标的距离、大气传输、目标的反射率、目标上的入射角、相机孔径以及条纹探测器和CCD的灵敏度等[12]。σlaser是激光脉冲轮廓的特征参数,由式(3)给出。
(3)

图1 成像激光雷达回波信号模型图
雷达可以在静态和扫描模式下操作。在扫描模式中,不同时间的回波信号将被与时间相关的电压偏转并成像到荧光屏的不同时间分辨条上。在静态模式下,偏转电压等于指定值,系统激光雷达仅作为没有时间分辨功能的成像设备。激光脚点将直接在荧光屏上成像,然后由CCD捕获。由于条形激光脚点非常窄,因此分辨率有限的系统将导致CCD上的原始图像模糊。通过在静态模式下测量沿CCD列的强度分布,可以获得静态模糊信号。图2为典型的静态条纹图像,表现出具有如式(4)所示的高斯拟合的静态模糊信号分布。
(4)
式中:Astatic为静态信号峰值;Bstatic为峰值位置;σstatic为静态信号弥散宽度。
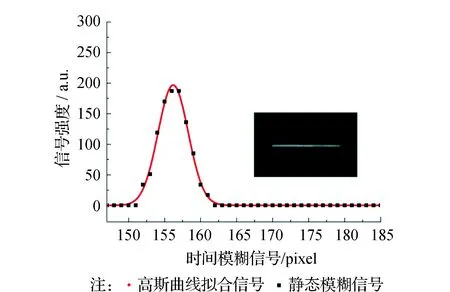
图2 静态工作模式下信号图像
当在扫描模式下工作时,由每个时间切片中的激光能量产生的模糊信号轮廓也是高斯形,因此可以给出时间切片中的弥散信号的时域分布,如式(5)所示。

(5)
如图2,时间分辨信号分布是F(x,t)对时间的积分[13]。

(6)
其中,
(7)
dCCD为CCD的象元尺寸,由式(7)可知,时间分辨信号宽度取决于静态信号弥散宽度τstatic和静态信号模糊宽度τlaser,并且时隙大小在函数中起重要作用。
当距离门非常窄时,可以近似用式(8)表示。
(8)
当系统具有大门宽时,可以近似用式(9)表示。

(9)
式中:C和μ为固定参数,信噪比SNR取决于探测器的性能指标。当激光雷达系统建立完成后,以上参数均保持不变,测距误差则主要取决于这种情况下的静态模糊宽度τstatic。
2 测距实验与结果分析
静态弥散宽度取决于探测器的成像分辨率,时间轴和方位轴的成像分辨率分别由施加到探测器的两个正交轴的电压确定[12]。可以通过改变施加到时间轴的电压,将施加到方位轴的电压保持在适当的值,以保证存在足够的方位角分辨率。
成像激光雷达测距系统的示意图如图3所示,在室内实验中,目标距离为10 m,Q开关固态激光器波长为532 nm,脉冲重复频率为1000 Hz,脉冲宽度为1ns,典型的最大平均输出功率使用30 mW作为照明源,用平面目标的测距结果评价弥散宽度对测距精度的影响。选取的平面目标距离雷达系统10 m,激光脉冲宽度1 ns。当调节静态弥散宽度时,总体信号宽度也相应发生改变,在弥散宽度为162.4 μm情况下获得0.27 m的测距精度,在弥散宽度为43.4 μm情况下获得0.06 m的测距精度,如图4所示。

图3 成像激光雷达测距系统结构示意图

图4 不同弥散宽度下的测距精度分析结果
在室外实验中,由于目标距离扩展到1 700 m,在其它参数不变情况下,采用具有高平均输出功率10 W和更宽脉冲宽度1.5 ns的激光系统。使用由3个柱面透镜组成的光束整形器,激光被展开成宽方位角(3°)和窄仰角(0.003°)扇形光束,作为一条线投射到场景上。使用焦距为300 mm的80 mm孔径尼康透镜收集散射的目标返回,并将其成像到条纹探测器的光电阴极上,使用具有1000×500像素分辨率的级联增强CCD捕获来自荧光屏的图像,使其在垂直方向上的时间段尺寸为1.15 ns,并且水平方向上的方位角分辨率为0.006°。激光器、条纹探测器和CCD使用由数字延迟发生器提供的3个独立触发器同步,并具有50 ps的典型定时抖动。当调节静态弥散宽度为178.9 μm时获得0.42 m的测距精度,在弥散宽度为47.6 μm情况下获得0.25 m的测距精度。
从室内和室外测距试验也可以看出,测距误差随着弥散宽度的增加而变差,并且测距误差与弥散宽度成正比关系,这与理论分析结果相一致。因此,应该最小化静态弥散宽度,以便利用当前条纹探测器的可用成像分辨率实现最高测距精度。
为了验证成像激光雷达测距系统在km级测量距离上的实际效果,使用功率为10 W的激光器,对1 700 m距离处的一座建筑进行了室外3D成像试验。试验结果表明,即使在明亮的日光条件下,在条纹探测器的光电阴极前面加装光谱和空间滤光器,也能限制太阳背景噪声。
图5为强日光背景下,分别使用180 μm和50 μm的弥散宽度,在1 700 m间隔距离处采集的相同场景的范围图像。在这两种弥散宽度下均能获取目标的距离图像,并基本识别出目标的整体形状。可以看出图5(b)中的距离像显然比图5(a)中的图更精细,当弥散宽度被减小以后,距离图像的整体噪声水平得到了有效的控制,并且图5(b)能够更好地表达建筑细节特征,比如窗户和墙壁的边缘处等。此外,在平面位置,图5(b)的成像结果明显更为平整,也能够很好地与真实情况对应。因此,可以判断缩减弥散宽度对距离像的获取质量非常重要,这进一步验证了理论分析和室内近距离实验的正确性。

图5 不同弥散宽度下远距离目标成像结果
3 结 论
本文建立了基于峰值检测算法的时间分辨信号分布的理论模型,包括静态模糊宽度和激光脉冲宽度计算模型,并改进了成像激光雷达系统的一般范围精度分析方法。通过实验结果分析表明静态弥散宽度对距离精度有显著影响,由于条纹探测器的分辨率有限,范围误差通常与其成正比,应设置得尽可能窄,以便获得最佳范围的图像。通过使用最佳静态弥散宽度成像,在室内和室外背景下,成像的距离和精度得到了很大提高,目标距离分别为10 m和1 700 m。在室内成像实验中,当静态弥散宽度为43.4 μm时获得的最优测距精度为0.06 m,范围测距误差之间的相关曲线与理论分析一致。在室外实验中,该理论在超过千米级距离成像上得到验证,并获得了测距误差为0.25 m的分米级3D图像。本方法为成像激光雷达系统的设计和性能评价提供了参考依据。
猜你喜欢
北京测绘(2022年5期)2022-11-22
云南画报(2021年8期)2021-11-13
汽车观察(2021年8期)2021-09-01
北京航空航天大学学报(2021年6期)2021-07-20
科学(2020年3期)2020-01-06
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
电子制作(2017年7期)2017-06-05
专用汽车(2015年1期)2015-03-01
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
