
双履带桥面摊铺机自找平控制系统研究
2020-04-21 11:02杜高昱李民孝马登成
建筑机械 2020年4期
杜高昱,李民孝,马登成
(1. 陕西省西安公路管理局,陕西 西安 710003;2. 中交西安筑路机械有限公司,陕西 西安 710032; 3. 长安大学 公路养护装备国家工程实验室,陕西 西安 710064)
随着我国公路交通事业快速发展,桥梁在公路网上越来越多,越来越重要。据统计截至2018年底,我国已拥有公路桥梁513702座,里程约48392km。由于桥梁的天然布置和作用,要求桥梁承载能力大,自身重量轻,使得桥梁桥面结构和厚度受到严格限制。现在桥梁铺设一般为浇筑式沥青混合料摊铺或一种新型改性聚氨酯材料铺装,这两种材料由于结构强度大、铺装厚度小、路面寿命长等特点,目前已得到很好的推广应用。但这种材料摊铺机由于摊铺桥面及其摊铺材料的特殊性,采用前面供料中间抹平的双履带摊铺机进行摊铺,摊铺平整度如何满足要求非常重要。本文就这种双履带桥面摊铺机找平系统进行探讨,以提出可行的理论依据及解决方法。
摊铺机自找平控制系统由液压缸来控制其升降以实现找平作用,液压缸在电控阀的控制下输出所需的运动和动力进行自动控制。双履带桥面薄层摊铺机挤压成型底板的厚度控制是电控阀通过控制机架两边的4个支撑油缸来实现,在摊铺过程中通过控制这4个支撑油缸实现挤压成型底板找平,达到摊铺路面平整度要求。
1 自找平系统控制机理和类型
自找平控制系统核心是电控阀控制液压缸输出所需的运动和动力实现工作装置运动。电磁阀是整个系统控制和动力传递的关键,它接受控制器的信号并转化液压动力输出。控制器将指令信号与传感器反馈信号进行比较和加工,向电磁阀发出指令。自找平系统控制原理如图1所示。

图1 自找平系统控制原理图
自找平控制系统主要有:(1)电液开关控制自动找平系统。这种系统中反馈检测元件为开关型传感器,电液转换元件为电磁换向阀。控制器由模拟电路构成,输出PWM控制信号。(2)电液伺服控制自动找平系统。这种系统中反馈检测元件为可连续输出模拟量电信号的传感器,电液转换元件为电液伺服阀,控制器由模拟电子线路构成,可根据传感器检测到的误差信号输出连续变化的模拟量控制信号。(3)数字式自动找平系统。这种系统与前两种系统的主要区别是控制器采用了数字电路或直接采用微机构成,可输出数字控制信号。反馈检测元件与控制器的接口采用A/D转换。电液转换元件可采用数字控制阀,电控制信号直接驱动,也可将控制器输出的数字控制信号经D/A转换后驱动常规的电液伺服阀或电磁换向阀。目前超声波和激光找平系统就是数字式自动找平系统的应用。 (4)全液压自动找平系统。这种系统中找平的控制由一个将反馈检测元件和机液伺服阀整合为一体的全液压自动找平传感器来实现,控制过程为全液压传感器检测误差信号,直接控制进入自找平油缸的流量,控制油缸的升降,实现自动找平。美国CMI公司生产的SF系列水泥摊铺机及美国PROHOFF公司生产的PAV-SAVVER系列滑模摊铺机均采用这种找平系统。全液压自动找平原理如图2所示。

图2 全液压自动找平原理
2 双履带桥面摊铺机运动学分析
2.1 双履带桥面摊铺机运动学模型
双履带桥面薄层摊铺机采用浮动机架每边两点支撑方案。它是通过调整立柱油缸来实现调节机架,使机架始终保持在设定的高度,而摊铺机中间的挤压抹平成型板与机架永久性联接,因此通过设定和调整机架高度可保证摊铺出来的路面达到预设厚度和平整度。图3所示为双履带摊铺机结构图,图4所示为双履带摊铺机的简化模型。

图3 摊铺机结构图
为了便于分析和研究问题,基于双履带桥面摊铺机在纵向相对于其纵向中间平面是对称的,建立运动学简化模型如图5所示。图中的G点为机架底部的挤压抹平成型板的后沿位置,2m为机架 重量。

图4 双履带摊铺机的简化模型

图5 双履带摊铺机纵向运动学简化模型
2.2 双履带桥面摊铺机运动学分析
如果双履带桥面摊铺机运行在平整的路面上时,机架平面无起伏波动,摊铺的路面也是平整的。反之如果路面起伏不平,机架平面要随之波动,将会影响摊铺质量。因此需配自动找平控制系统,用传感器来检测由于路面不平造成的机架波动量,再由系统及时来纠正补偿由此造成的误差,保证摊铺机机架在设定的高度上工作,保证摊铺路面平整度。
这里不考虑找平立柱油缸的弹性和阻尼,并假设找平立柱油缸与机架是刚性联接时,当摊铺机越过凸起处,使履带前段抬升H1,整个工作装置(挤压抹平成型板)随机架绕履带后支点B为转轴向上仰升,如图6所示。

图6 双履带摊铺机工作示意图
机架仰升角

挤压抹平成型板的后沿抬升高度

因此,在不平整的路面上行驶,双履带摊铺机能将路面不平度的随机波形消减后再感应到机架上,减少地基路面不平度对摊铺路面的影响,即摊铺机的履带和机架本身也具有滤波功能。随着摊铺路面平整度要求越来越高,摊铺机自身的滤波远远不能满足摊铺路面平整度要求,必须依靠加装的自动找平控制系统提高摊铺平整度。
2.3 双履带桥面摊铺机自动找平系统原理
双履带桥面摊铺机的自找平液压系统原理与控制过程如图7、图8所示。
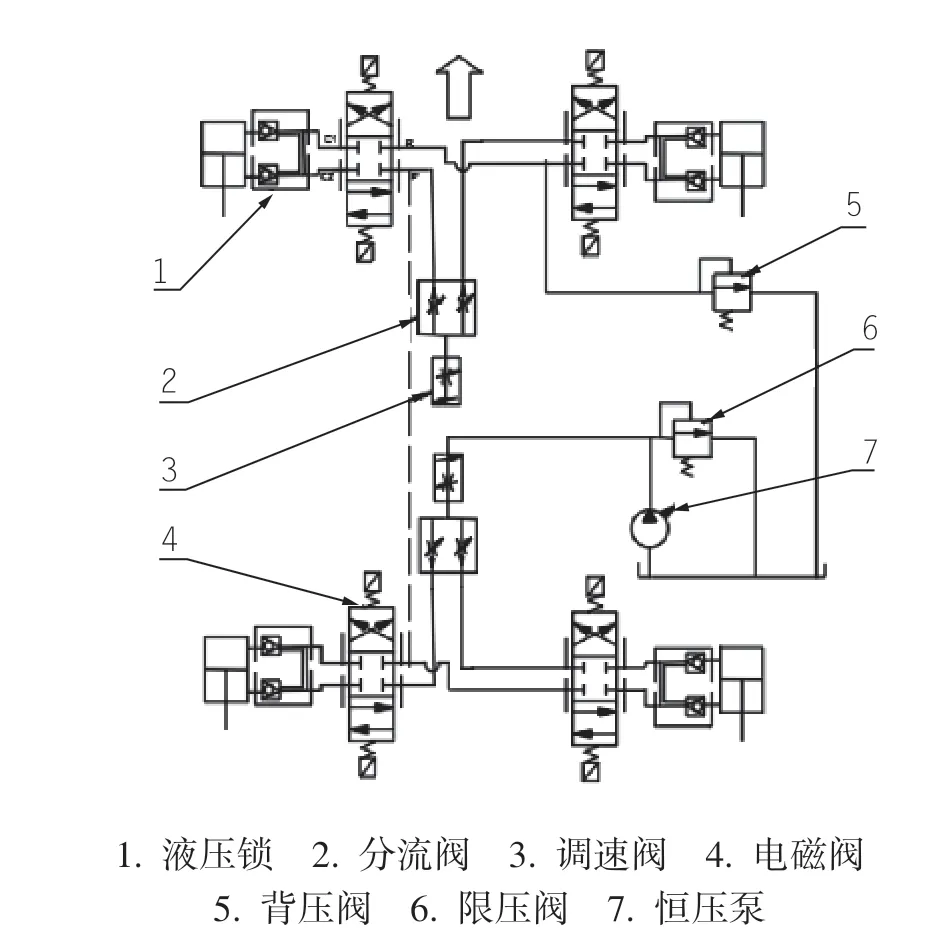
图7 自找平液压系统原理图

图8 双履带桥面摊铺机自动找平控制过程图
如图7、图8所示自动找平系统,控制由一个将反馈检测元件和机液伺服阀整合为一体的全液压自动找平传感器来实现。控制过程为全液压传感器检测误差信号,直接控制进入自找平油缸的流量,控制油缸的升降,实现自动找平。
3 自找平系统应用
3.1 电液开关控制自动找平系统应用
电液开关控制系统一般为比例-脉冲式自动调平系统,如图9所示为自动找平系统布置图,系统由参考基准、控制器、接触式纵坡传感器、调平油缸及电磁换向阀等组成。
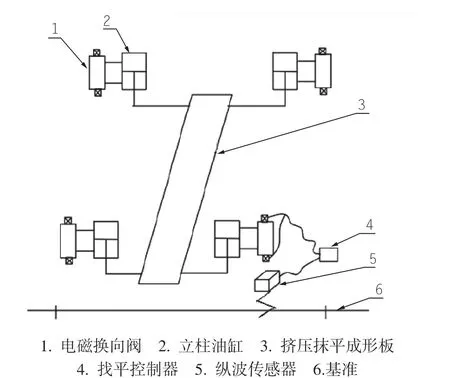
图9 自动找平系统布置图
图9 中,参考基准线是摊铺机两侧纵向架设的具有一定张力的钢丝或一定长度的平衡梁、平整路面或道缘等,纵坡传感器通过支架安装在支撑油缸处的机架上,其垂直位置可以调节。调平油缸为机架支撑油缸,通过控制器控制电磁换向阀来控制支撑油缸实现找平。由于双履带桥面摊铺机机架由4个支撑油缸(找平立柱油缸)支撑,位于摊铺机中间的挤压抹平成型板与机架刚性联接,因此找平控制为4个相对独立控制系统,为简化这里仅说明其中一个控制应用过程。
找平系统工作过程如下:
摊铺过程中,当左侧路面不平,摊铺机机架前端升降时,安装在机架前端的纵坡传感器也将随之升降,这就改变了传感器(见图10)的传感臂与基准线之间的夹角(一般设定为45°),从而产生高度偏差信号。纵坡传感器(通过控制器)将此高差信号转变为PWM信号,驱动左侧电磁阀使找平立柱油缸上升或下降,直到挤压抹平成型板恢复到设定位置。此时偏差信号消失,油缸停止调节。
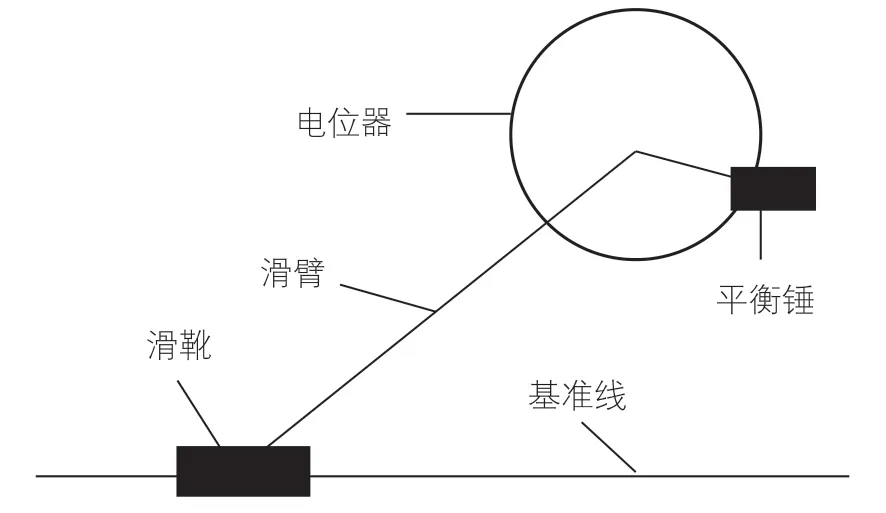
图10 传感器结构图
比例-脉冲式自找平系统其特点是在“恒速调节区”与“死区”之间设置“脉冲区”。在脉冲区内,驱动电磁阀的电信号为脉冲信号,其随着偏差的不同而成比例变化。变化的方式有两种,即改变脉冲宽度和改变脉冲频率(见图11)。当偏差较小,位于死区内时,系统不起调节作用。当偏差越死区而进入脉冲区时,控制器便以宽度或频率与偏差大小成比例的脉冲信号推动电磁阀,使找平立柱油缸以相应的速度调节机架的垂直高度。当路面的不平度较大而使偏差进入恒速调节区时,控制器便输出连续不间断的调节信号,使调平油缸恒速调节。改变脉冲宽度时的调节过程如图12所示。这种控制系统采用的高频(一般为5~6Hz)开关型电磁阀,脉冲信号的占空比决定了电磁换向阀通断时间的长短,从而控制了通过电磁换向阀单位时间的流量,这样就实现了找平立柱油缸速度及位置的 控制。

图11 脉冲信号波形
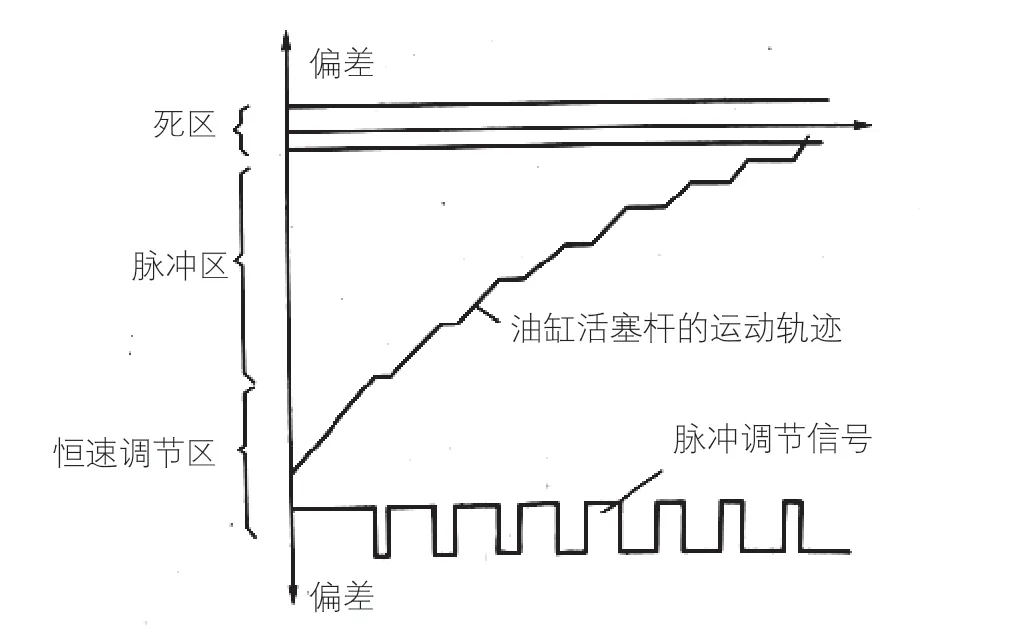
图12 改变脉冲宽度时的调节过程
3.2 数字式自动找平系统应用
随着微电子技术和计算机技术的发展,数字式自动找平系统的应用越来越广泛。典型的应用为多探头超声波自找平控制系统,其控制系统组成和图9描述的基本相同。核心是传感器由接触式传感器升级超声波非接触式,避免了架设钢丝等基准,控制器由模拟信号处理升级为数字信号处理。
超声波传感器实质上是一种可逆的换能器,它将电振荡的能量变为机械振荡形成超声波,或者由超声波能量变成点振荡。超声波传感器可分为发送器和接收器,发送器将电能变为超声能,而接收器则将接受超声波的能量变为电能。超声波在待测高度的空气介质中传播时,若测出超声波发出或回波接收时间差及传播速度,则可计算出机架(挤压抹平成型板)的高度。
超声波传感器(见图13)一般采用多探头超声波技术,在摊铺机上使用多探头超声波高度传感器,通过多点探测可以精确的检测面或线的细微变化。但超声波受环境温度、风、烟尘等影响,其应用受到一定局限。

图13 超声波传感器
3.3 全液压自动找平系统应用
全液压自动找平系统由参考基准、全液压纵坡传感器、调平油缸等组成。将图9中的控制器和电磁换向阀功能综合到全液压纵坡传感器中,即将反馈检测元件和液电阀整合为一体,由全液压自找平传感器来实现。如美国的CMI公司的SF系列水泥滑模摊铺机使用的全液压自找平系统(如图14所示),在转轴上装有一个偏心轮,偏心轮推动一个高精度的滑阀阀芯,工作时利用滑阀阀芯的位移直接改变系统液压油的流量和方向,从而直接控制找平立柱油缸升降。

图14 全液压自找平应用
4 全液压自动找平系统应用分析
由于摊铺机自动找平系统由设定-误差检测反馈处理-电磁阀及油缸执行元件构成,系统为闭环控制,由于检测信号处理传输及执行机构等“滞后效应”的影响,因此中间环节越少越好。对于电液开关式和数字式自找平控制系统来说,由于控制器发出的信号并不是直接控制立柱找平油缸,控制器和油缸之间通过液电信号的传递,传感器到控制器,由控制器控制信号的发出到电磁阀的响应再到油缸的运动直至达到要求的位置需要一个响应时间。如图15所示,t1代表滞后时间,S1代表油缸动位。

图15 油缸响应函数
而这段时间内控制器也同时在不停的对机架的位置状态进行检测。在油缸还没达到要求的位置时,控制器所采集的信号并没有真实地反映控制信号效果,但控制器后续信号还需紧跟处理,因此找平效果受影响因素较多。而全液压自动找平系统由全液压自找平传感器来直接改变系统液压油的流量和方向,直接控制找平立柱油缸升降,这样控制环节少,精度高,在水泥滑模摊铺机上得到广泛应用,因此双履带桥面摊铺机采用全液压自动找平系统有一定应用优势。
5 结束语
通过对这种双履带桥面摊铺机找平系统的探讨,分析、归纳了双履带桥面摊铺机自动找平的组成、工作原理,对其进行了运动学分析,研究了地面不平整度波形波长和履带长度之间的关系对挤压抹平成型板的影响,得出了地面不平度能通过履带和机架过滤消弱的结论,阐述了双履带桥面摊铺机的3种自动找平系统应用。目前在双履带桥面摊铺机上采用全液压自动找平系统有一定应用优势。由于数字液压技术的发展,未来成本低、性能好的高速开关阀取代常用的伺服阀和比例阀实现数字式找平控制系统升级将变成可能。
猜你喜欢
兵器装备工程学报(2021年3期)2021-04-09
石油化工建设(2019年6期)2020-01-16
锦绣·下旬刊(2019年2期)2019-10-14
现代农机(2018年1期)2018-02-11
筑路机械与施工机械化(2015年11期)2015-07-01
筑路机械与施工机械化(2014年8期)2014-03-01
筑路机械与施工机械化(2014年5期)2014-03-01
筑路机械与施工机械化(2014年5期)2014-03-01
筑路机械与施工机械化(2014年5期)2014-03-01
筑路机械与施工机械化(2014年4期)2014-03-01
