基于图像处理的场面监视雷达目标检测
2020-04-17 14:53黄涛
科学与信息化 2020年3期

摘 要 针对场面监视雷达目标检测问题,提取一种基于图像处理的场面监视雷达目标检测方法。首先,把雷达回波数据映射到二维图像矩阵中;其次,进行中值滤波,并把图像分割;然后,采用8邻域链路法提取图像中目标的轮廓信息,并计算出目标的中心、距离宽度和方位宽度等信息,并根据预设的点迹过滤条件,过滤掉不能满足方位、距离条件的杂点;最后对点迹合并,抑制飞机姿势或者阵地原因造成的目标分裂。实验表明,所提出的方法能够消除雷达杂点和干扰,也很好抑制目标分裂。
关键词 目标检测;图像处理;目标分裂;杂点抑制
引言
航空运输业的快速发展,机场场面的飞机和车辆也日益增多,越来越多的机场选择安装场面监视雷达系统[1]。由于机场存在复杂环境,产生大量的杂波干扰,另外,由于飞机姿态的不同,获取到的飞机回波存在飞机机身与机翼的分裂,导致一个目标检测出多个目标。错误的目标检测,会造成无法挽回的损失。形态学的图像处理[2],也只能抑制少量的独立的杂点,不能解决目标的分裂和占据多个像素点的杂点。
为了解决上述问题,本文提出了一种基于图像处理的场面监视雷达目标检测方法。
1 基于图像处理的场面监视雷达目标目标检测
处理流程如图1所示,包括二维图像生产,图像平滑处理、图像分割、目标提取、目标过滤机目标合并。
1.1 二维图像的形成
雷达最大距离测量范围0~Rmax米,最大方位测量范围0~360°,量化雷达距离单元Rcell,量化方位单元数为Acell,则雷达回波极坐标位置(R,A)转换到像素坐标公式如下
其中,Ypixel是回波距离转换到像素坐标轴的值,Xpixel是方位转换到像素坐标的值,R为雷达回波距离,A为方位,floor()为取整运算。真实目标和杂波都会在图像中形成亮块。
1.2 图像平滑处理
由于噪声、杂波和各类干扰,会在雷达图像中形成小像素点。图像平滑处理会增强图像中的低频成分,减弱图像中的高频成分,主要用于抑制图像中干扰的高频噪声,本算法采用中值滤波。
中值滤波是一种基于排序统计理论的非线性平滑技术,它的基本原理是将数字图像中的每个像素点的颜色值用该点某领域口内的所有像素点颜色值的中值代替,能够有效保护好图像的边缘信息[3]。中值滤波模板为3*3矩阵,中值滤波从图像中滤除孤立的噪声点,同时保存了目标的边缘信息。
1.3 图像分割
为了检测到雷达图像中的目标,首先要将目标从雷达图像中分割出来,分割质量的好坏直接影响后续的目标检测的正确性。因为场面监视雷达图像帧与帧之间亮度会发生变化的特点,使用Ridler自适应阈值法作为图像分割算法[4]。
Ridler自适应阈值法是一种利用迭代计算来选取合适阈值的方法[5],Ridler方法利用给定的初始阈值,不断迭代计算,最终获取到一个最佳的分割阈值。
1.4 目标提取
雷达目标的提取,我们最关心的特征是目标的位置、幅度及尺寸的参数信息,要获得这些信息,首先要搜索出目标的轮廓信息,然后根据轮廓信息计算出目标位置、幅度及尺寸信息。
雷达图像经过图像分割处理,转化成了背景为黑色、目标为白色的二值图像,提取目标轮廓步骤如下[6]:
(1)按照从左到右、从上到下的扫描顺序,搜索图像的白色像素点,找到第一个白色像素点p0作为轮廓的起始值;
(2)从p0开始按逆时针方向读取它的8个领域点像素值,当第一次发现白色的像素时,为pk (k初始值为(1)的链码,并将该点作为下一点搜索的初始点;
(3)将pk作为初始点,类似与步骤(2)逆时针方向搜索白色像素点,记为pk+1,记录下pk+1的链码,直到以pk+1为初始点进行搜索时在没有剩下的轮廓点时,搜索结束。
通过对雷达图像的轮廓点处理,同一目标的像素点组成一组,假设某个目标由N个像素组成,其中每个像素在X轴上的像素距离为pxi,在Y轴上的像素距离为pyi(i = 1,2,…,n),则得到目标位置:
其中,Σ取和运算,根据目标的轮廓信息,可以提取出目标的方位宽度、距离宽度及幅度信息,这些信息可以用于后续的目标过滤及航迹跟踪。方位宽度Awidth为一个目标组中最大方位与最小方位值之差,距离宽度Rwidth为一个目标组中最大距离与最小距离之差,幅度Amp为组中所有点幅度平均。
1.5 目标过滤
杂波和干扰在雷达图像中形成小的像素块,前期中值滤波不能完全去除像素块,需要通过目标过滤,目标过滤主要考虑雷达的不同特征参数信息。机场检测目标主要是飛机、机动车辆等,其距离宽度、方位宽度和幅度必然在一定区间内。设定4个参数距离尺寸的最小门限(MinRangeSize)和最大门限(MaxRangeSize),方位尺寸的最小门限(MinAzimuthSize)和最大门限(MaxAzimuthSize)。
1.6 目标合并
由于大目标(如大型飞机)运动姿态的问题,雷达回波强度变化起伏大,在雷达图像中形成两个或者多个接近但独立的点,如何不进行目标合并,后期将会形成多个航迹。目标合并就是把邻近的目标点结合起来从而形成一个新的目标点。设定2个参数距离门限(MergeRangeSize),方位门限(MergeAzimuthSize)。
2 实验结果与分析
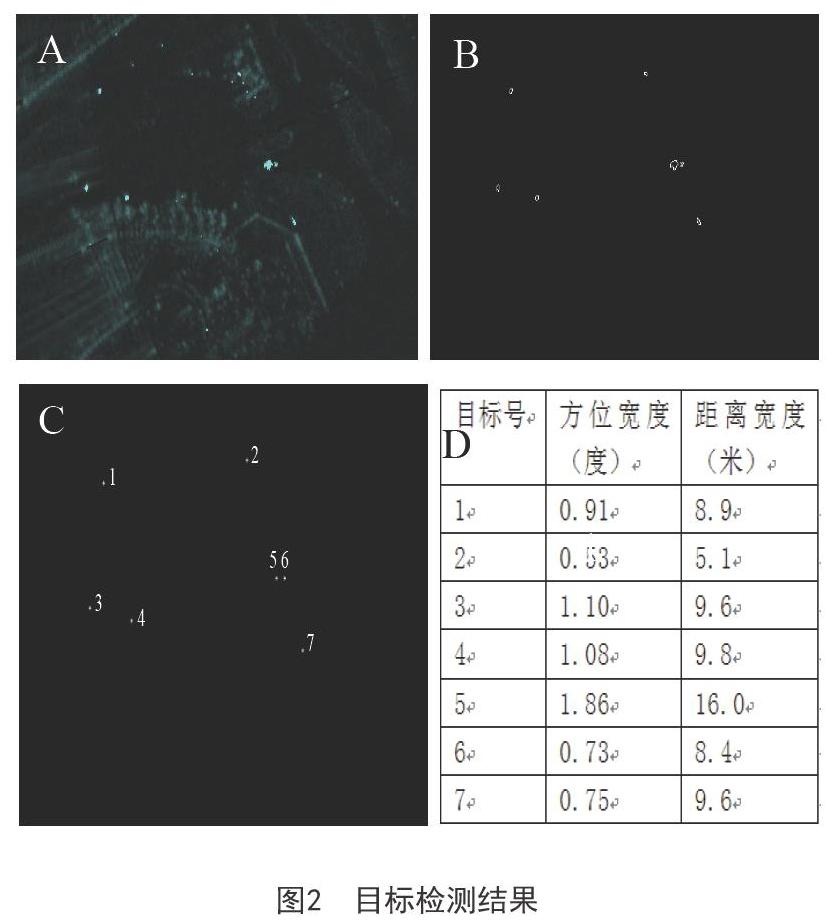
实验数据利用安徽四创电子股份有限公司场面监视雷达在合肥新桥国际机场采集数据,图2的A图为形成雷达二维图像,B图为平滑和轮廓提取结果,C图是提取目标位置结果,D图是提取目标的参数。
在图2中,B图与A图对比,数学形态学的平滑处理过滤掉了一些孤立的杂点,但像素块稍大的杂点仍然存在。所以基于数学形态学的图像处理,只能过滤掉一些小像素块的孤立干扰。
在图2中,从图D列出的目标属性可以看出,目标号2的方位宽度和距离宽度明显小于其他目标,根据目标过滤参数可以把2号目标过滤。
在图2中,图C显示出了目标位置,目标号5和6在方位和距离上非常靠近,可以判定是大目标分裂的问题,满足目标合并的条件,即合并为一个目标。
经过上述处理,最终输出目标5个目标。与真实场景相符。与基于数学形态学的图像处理[2]相比,不仅能抑制的独立的杂点,也能过滤占据多个像素点的杂点,同时解决目标分裂问题。
3 结束语
针对场面监视雷达杂点、目标分裂问题,提出了基于图像处理的场面监视雷达目标检测算法。首先把回波数据映射到二维图像矩阵中;其次,进行图像平滑处理,并把图像分割;然后,采用8邻域链路法提取图像中目标的轮廓信息,并计算出目标的坐标、距离和方位宽度信息,并过滤掉不能满足方位宽度、距离宽度条件的杂点;最后对点迹合并,抑制目标分裂。通过真实数据实验,与基于数学形态学的图像处理相比,所提出的方法能够消除杂点,也很好解决目标分裂。
参考文献
[1] Eli Perl. Review of airport surface movement radar technology[J]. IEEE Aerospace and Electronic Systems Magazine,2006,21(10):24-27.
[2] 黃鲲鹏.基于数学形态学的图像预处理算法的研究[J].电脑知识与技术,2009,5(29):8254-8255,8264.
[3] Chin-Chen Chang,Ju-Yuan Hsiao,Chinh-Ping Hsieh.An Adaptive Median Filter for Image Denoising[J].IEEE Intelligent Information Technology,2008,8(2):346-350.
[4] Kittler j,Illingworth j. On threshold selsction using clustering criteria[J]. IEEE Trans Syst Man Cyber,1985,15(4):652-655.
[5] 田守东.基于雷达图像的目标检测技术研究[D].哈尔滨:哈尔滨工程大学,2010.
[6] 左飞,万普森,刘航.Visual C++ 数字处理开发入门与编程实践[M].北京:电子工业出版社,2008.
作者简介
黄涛,男,安徽合肥人;毕业院校:中国科学技术大学,专业:软件工程,学历:硕士研究生,现就职单位:安徽四创电子股份有限公司,研究方向:数据处理。
猜你喜欢
今日自动化(2022年5期)2022-07-22
电脑知识与技术(2022年9期)2022-05-10
电脑知识与技术(2022年9期)2022-05-10
计算技术与自动化(2022年1期)2022-04-15
教育教学论坛(2018年5期)2018-01-22
软件(2016年4期)2017-01-20
科教导刊·电子版(2016年28期)2017-01-10
科学与财富(2016年28期)2016-10-14
电脑知识与技术(2016年5期)2016-04-14
科技视界(2016年4期)2016-02-22