干涉型光纤水听器3×3 反正切解调方法
2020-04-17 19:02:54代欣学陈亚林贠晓辉王海陆
舰船科学技术 2020年2期
代欣学,陈亚林,贠晓辉,王海陆
(中国船舶重工集团公司 第705 研究所,陕西 西安 710077)
0 引 言
光纤水听器的研究始于20 世纪70 年代末[1]。目前备受关注的是干涉型光纤水听器,在对干涉型光纤水听器的信号解调技术的研究中,被动零差检测方式更适于大规模水听器阵列,其主要包括2 种方法,一种是相位载波生成法(PGC),其动态范围较小。另外一种方法是Koo K P 提出的3×3 耦合器法[2],相比于PGC 法,3×3 耦合器法不需要引入载波且动态范围更大,因此,受到了国内外众多学者的广泛关注。Sheem S K 以3×3 耦合器作为干涉仪输出端提高了灵敏度[3]。Todd M D 提出并改进了反正切方法,消除了耦合器不理想特性对解调结果的影响[4]。何俊理论分析并实验计算出了3×3 耦合器的3 路输出信号相位差[5]。张晓峻对微分交叉相乘(DCM)解调方法进行了仿真分析[6]。毛欣对基于3×3 耦合器解调方法的分析结果表明,DCM 法动态范围大于反正切法[7]。宋美杰针对3×3 耦合器法干涉仪的偏振态调节的不足,借鉴相位载波生成法的经验,提出了一种新的解调算法[8]。可以看出,3×3 耦合器解调方法是目前学者们的研究热点,但是对于3×3 耦合器反正切解调方法中耦合器相位差特性偏差对解调效果的影响,以及对于不同类型信号的解调效果的研究,还有待补充。
本文介绍了基于不理想3×3 耦合器的两路输出信号进行解调的方法,推导出了解调算法的输出信号表达式,利用Simulink 建立了基于此种方法的解调系统模型。首先仿真分析了反正切相位扩展效果和耦合器相位差特性偏差对解调的影响,然后仿真分析了该方法对单频、线性调频信号的解调效果。最后,搭建了一个基于此算法的干涉型光纤水听器解调系统进行实验验证。解调结果表明,基于该解调算法的干涉型光纤水听器解调系统解调效果稳定可靠,能基本满足光纤水听器实际应用要求。
1 基于3×3 耦合器的反正切解调原理
3×3 耦合器具有独特的光学特性,理想情况下,基于3×3 耦合器的迈克尔逊干涉仪各路输出信号的相位差刚好为120°,在实际情况下,3×3 光纤耦合器相位差特性不理想,故不能严格保证为120°,其误差越大,解调结果中的谐波分量越高,失真越严重。
图1 中Laser 表示激光源,Optical Isolator 表示光隔离器,PIN Diode 表示光电转换模块,FRM 表示法拉第旋转镜,PZT 表示压电陶瓷传感器,R,S 分别表示参考光纤、传感光纤,其中传感光纤绕在PZT 上,用特定电信号调制PZT 来模拟声信号。如图1 所示,2 个光电二极管接收到的信号可表示为:

其中: A1A2为干涉信号的直流分量 B1B2为干涉信号的交流分量的幅度 φ(t)为 干涉仪信号臂扰动信号; α描述干涉仪输出信号相位差。
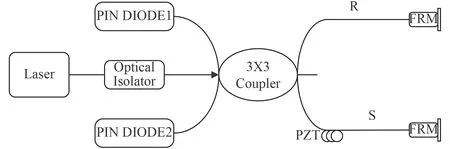
图 1 基于3×3 耦合器的迈克尔逊干涉仪结构Fig. 1 Michelson interferometer structure based on 3×3 coupler
如图2 所示,两路信号再经过去直流高通滤波器后可表示为:

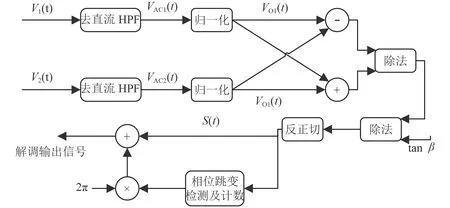
图 2 基于3×3 耦合器的解调方法Fig. 2 Demodulation method based on 3×3 coupler
根据式(3)和式(4)的结果分别计算出这两路信号的幅度,并做如下归一化处理:

对上述两式进行相减和相加运算可得到:

将式(7)和式(8)相除,可以得到如下结果:

在实际应用中,干涉仪输出信号的相位差特性不理想,并不是理想的120°,这种偏差将会降低解调算法的可解调动态范围,为了降低这种偏差造成的影响,可以对式(9)做如下处理:

其中, β为干涉仪相位差偏移补偿值,与干涉仪采用的3×3 光纤耦合器光学特性有关。

其中, φ(k) 是当前时刻的反正切输出结果, φ (k-1)是前一时刻的输出结果。若 |Δφ|<π,则意味着反正切输出结果没有发生相位跳变,输出结果不需要修正;若|Δφ|>π,则意味着输出结果发生相位跳变,此时就要判断跳变的方向,若 Δφ <0,则代表相位发生负跳变,需要加上一个 π; 若 Δ φ >0,则代表相位发生正跳变,需要减去一个π。
2 仿真结果
2.1 相位扩展
本文利用Simulink 建立了基于3×3 耦合器的两路输出信号进行解调的仿真模型。为观察反正切输出结果与相位扩展效果,设定 α=β,对频率为1 kHz,幅度为10 rad 的输入信号进行解调仿真。如图3 和图4 所示,通过检测反正切直接输出结果的相邻差值来扩展相位,可以得到无失真的解调结果。本文用解调系统输入和输出信号的相关系数来描述解调效果,规定当相关系数小于0.99 时,则认定解调结果失真。
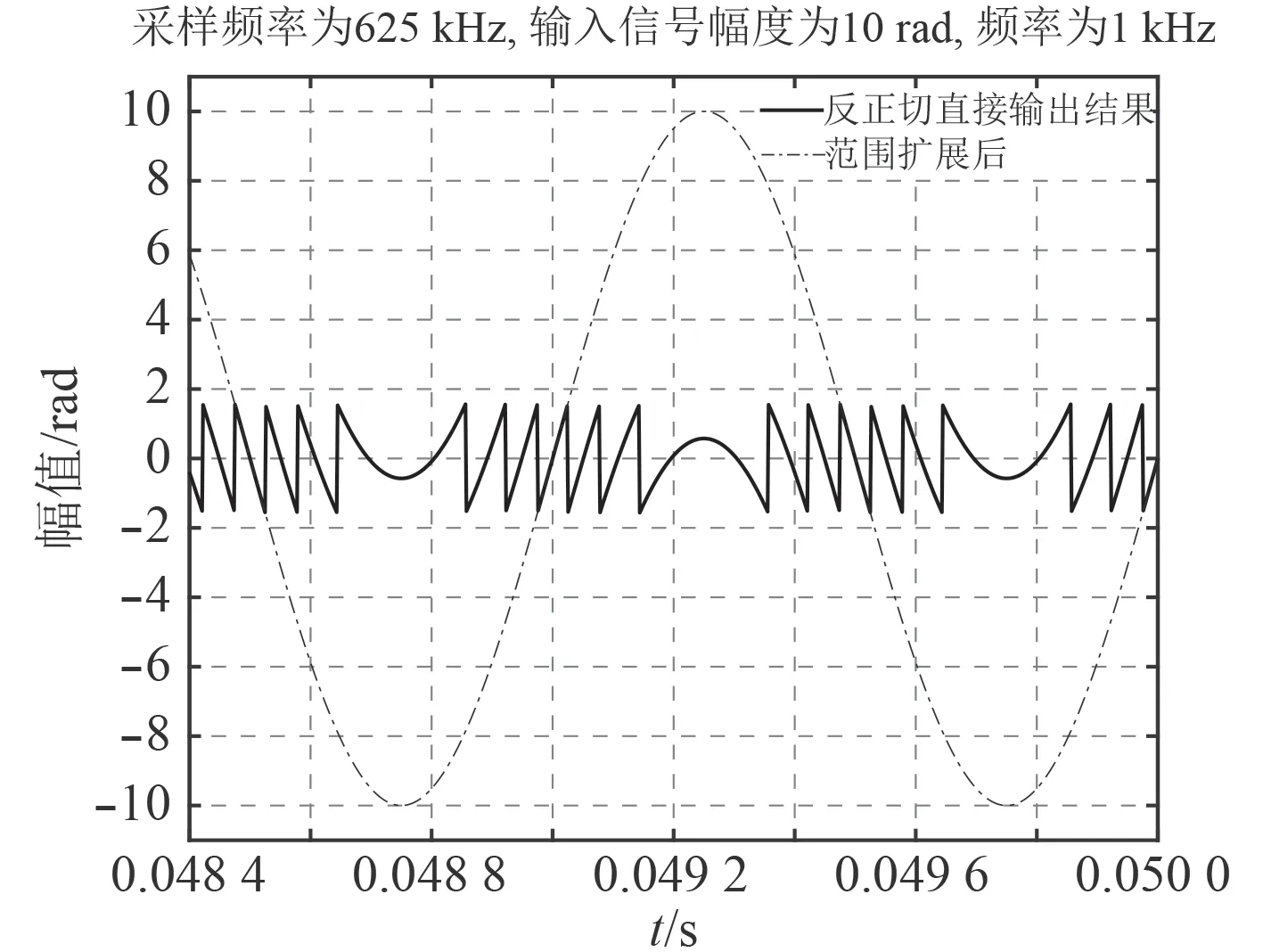
图 3 相位扩展Fig. 3 Phase extension

图 4 相邻差值Fig. 4 The difference between adjacent results
2.2 干涉仪相位差偏差对解调的影响

图 5 解调信号的时域图和频谱图Fig. 5 Waveform and spectrum diagram of demodulation signal
理想的3×3 耦合器的输出信号具有120°的相位差特性,根据文献[5]可知,实际情况下,3×3 耦合器的输出信号相位差与理想值之差在1°以内,本文对β=60,|α-β|<5的情况进行仿真,输入为1 kHz,幅度为10 rad 的正弦信号,仿真结果如图6 所示。

图 6 相关系数与偏差值的关系Fig. 6 The relationship between correlation coefficient and deviation value
当3×3 耦合器的输出信号之间的相位差与120°的偏差在10°以内时,采用本文所用解调方法得到的输出信号与输入信号的相关系数在0.999 94~1 之间,这说明在这样的偏差情况下,解调结果未失真,证明本解调算法能够消除3×3 耦合器的输出相位差偏差带来的影响。
2.3 对单频信号的解调
2.3.1 不同幅度下的解调效果
干涉仪输出信号是一种调频信号,根据卡森估算公式,可知,输出信号的有效频谱宽度为:

根据式(12)和奈奎斯特定理,为了解调信号不失真,模数转换器的采样率应该满足如下条件:

其中 Dmax=D+1表示可不失真解调的信号幅度上限,D 表示待解调信号的幅度, fs表示待解调信号的频率, fsam表示模数转换器采样率。利用Matlab 可以得到不同采样频率下,输入信号频率与可不失真解调信号的幅度上限之间的关系曲线如图7 所示。可以看到,通过增大采样频率,可以不断提高可不失真解调信号的幅度上限,但需要考虑实际应用中的器件条件。
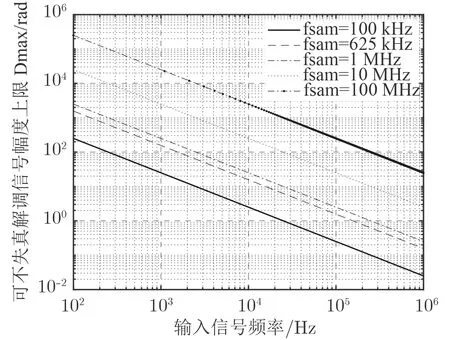
图 7 信号幅度上限Fig. 7 Upper limit of signal amplitude
当采样频率为625 kHz,输入信号频率固定在1 kHz时,对不同幅度信号进行解调,仿真得到相关系数曲线如图8 所示。

图 8 不同幅度条件下的相关系数Fig. 8 Correlation coefficients under different amplitude conditions
2.3.2 不同频率下的解调效果
φ(t)
令输入信号 的幅度为10 rad,采样频率为625 kHz,仿真分析对不同频率输入信号的解调情况,如图9 所示。

图 9 不同频率条件下的相关系数Fig. 9 Correlation coefficients under different frequencies conditions
由图8 和图9 可知,当输入信号为单频信号时,在一定频率、幅度范围内,输入输出信号的相关系数能保持在0.99 以上,即能无失真解调。当频率、幅度继续增大至不满足条件式(13)时,相关系数小于0.99,解调结果失真,无法还原出输入输入信号。
2.4 对线性调频信号的解调
线性调频信号是指瞬时频率随时间线性变化的信号,本文采用线性调频信号初始相位为零,幅度为10 rad。解调系统采样率为625 kHz。
2.4.1 不同带宽情况下的解调效果
当输入线性调频信号的中心频率为定值时,对不同带宽情况下的解调效果进行仿真分析。
2.4.2 不同中心频率情况下的解调效果
当输入线性调频信号的带宽为定值时,对不同中心频率情况下的解调效果进行仿真分析,结果如图10和图11 所示。
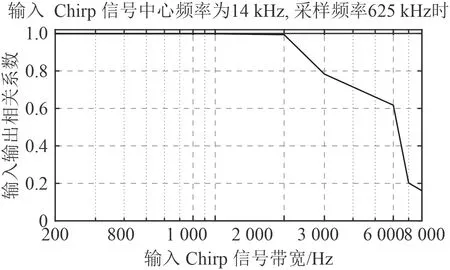
图 10 不同带宽条件下的相关系数Fig. 10 The correlation coefficients under different bandwidth conditions
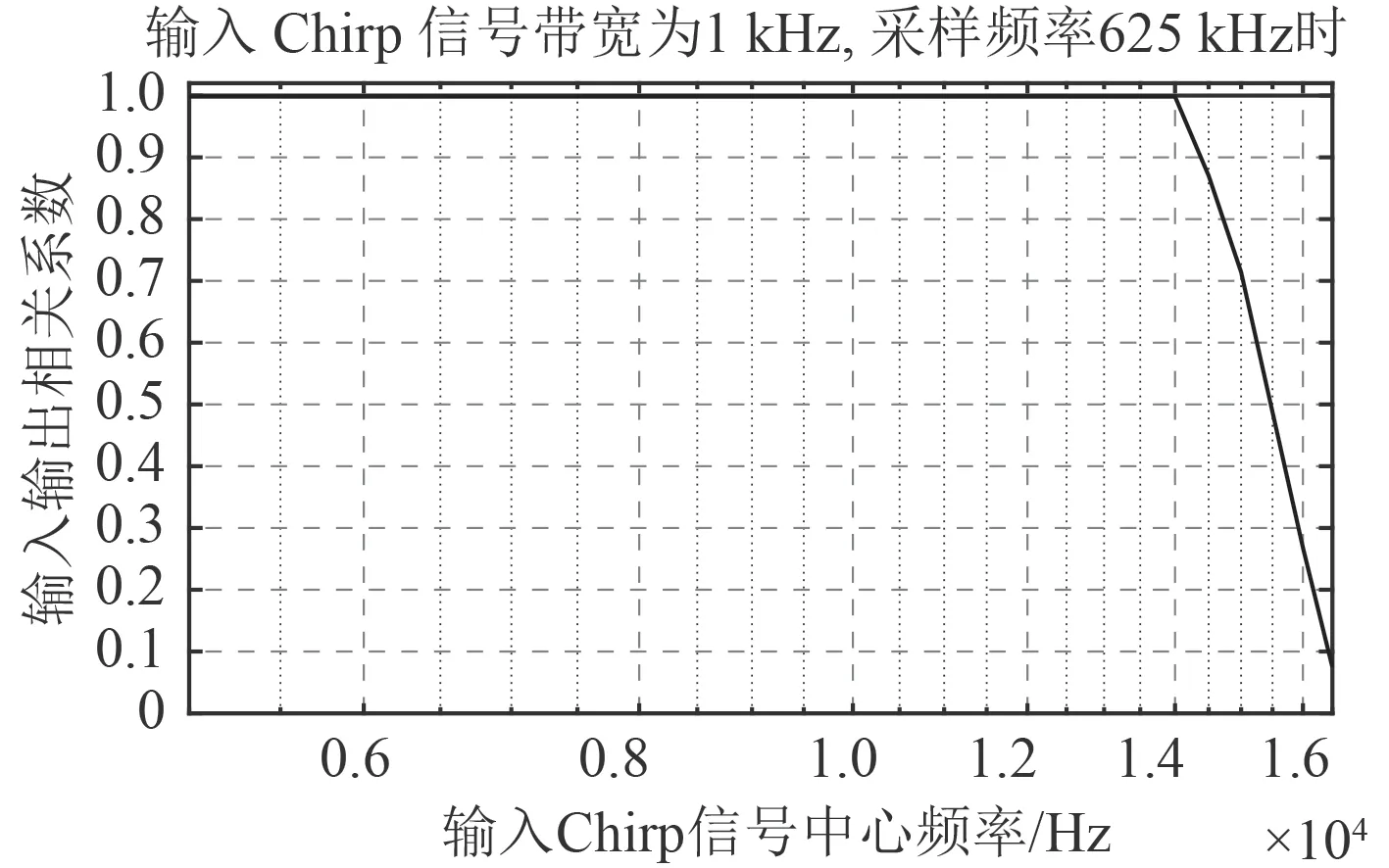
图 11 不同中心频率条件下输入输出信号相关系数Fig. 11 The correlation coefficient at different center frequencies
由图10 和图11 可知,当输入信号为线性调频信号时,相关系数的变化趋势与单频信号相似,在一定的带宽、中心频率情况下,相关系数均在0.99 以上,解调无失真,当带宽、中心频率继续变化至不满足条件式(13)时,解调即失真。观察图8~图11 可知,无论输入是单频信号,还是多频信号,只要信号频率、幅度满足条件式(13),就能实现无失真解调。
3 实验结果
为了验证本文解调算法的实际解调效果,本文进行了模拟水声信号解调。通过对补偿干涉仪的压电陶瓷加载驱动电压信号来模拟水声信号。本系统采用RIO 稳定光源,输出功率稳定度≤0.1 dB,补偿干涉仪使携带传感信息的传感光与参考光进行干涉,传感信息以余弦的形式调制在干涉光波信号的相位上。光电转换器将光信号转换为电信号,每通道电输出信号本底噪声≤5 mV,光插入损耗≤14 dB,以XILINX 公司XC5VLX50T 系列FPGA 芯片为核心来实现解调算法,系统输出采样率为10 kHz,数据精度为14 bit,通过FPGA 对采样数据进行解调,并将解调结果送至上位机,通过Labview2014 程序进行显示和分析。实验中待测信号是1 kHz,18 rad 的正弦信号,去直流及归一化处理前后的两路相位信号以及李萨如图如图12 和图13所示,解调输出时域图和频谱图如图14 所示,输出信号幅度稳定在17.9~18.1 rad 之间,频率为1 kHz,基波信号幅度与最大谐波幅值差大于30 dB,解调结果准确可信,由频谱图可知本解调系统1 kHz 处的动态范围大约为90 dB。
图 12 干涉仪输出信号Fig. 12 Two output signals of the interferometer

图 13 去直流及归一化处理前后的李萨如图Fig. 13 Lissajous diagram of two interference signals
4 结 语
本文介绍了一种利用3×3 耦合器的两路输出信号进行解调的方法,推导了输出信号表达式,利用Simulink 建立了解调模型。由仿真结果可知,系统动态范围下限决定于系统本底噪声,可以通过提高系统采样率来增大系统动态范围上限,进而提高系统动态范围。对单频、线性调频信号进行了解调仿真,仿真结果与式(13)所描述的不失真解调条件相符,当输入信号频率、幅度不满足该条件时,解调结果即失真。最后,搭建了基于此方法的数字化解调系统进行算法验证。实验结果表明,基于该解调方法的干涉型光纤水听器解调系统能够无失真解调出输入的模拟水声信号,且谐波性能好、解调结果准确可靠。本文研究内容对干涉型光纤水听器数字化解调系统设计具有一定的理论指导价值。
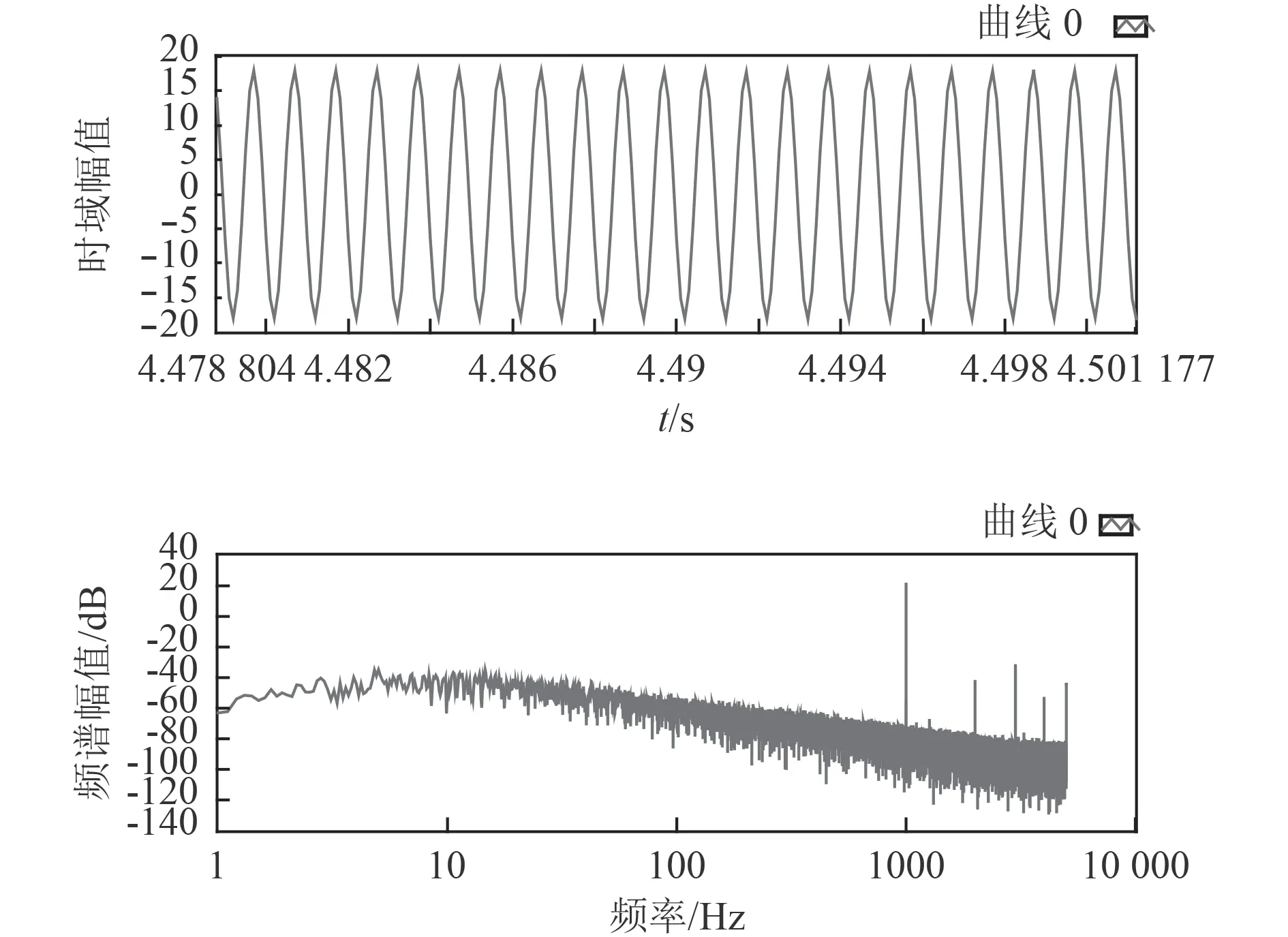
图 14 输出信号波形和频谱Fig. 14 The waveform and spectrum of the output signal
猜你喜欢
九江学院学报(自然科学版)(2022年2期)2022-07-02 02:34:06
电声技术(2022年3期)2022-04-28 00:22:50
能源工程(2021年5期)2021-11-20 05:50:42
应用科技(2020年1期)2020-06-18 02:02:36
计测技术(2020年6期)2020-06-09 03:27:14
航天电子对抗(2019年4期)2019-06-02 08:22:40
制导与引信(2017年3期)2017-11-02 05:16:58
西部广播电视(2015年9期)2016-01-18 03:46:07
西部广播电视(2015年9期)2016-01-18 03:46:04
海军航空大学学报(2015年4期)2015-02-27 13:45:51