摆翼式波浪能发电海洋航行器无水实验系统
2020-04-17 18:57:08王宇宫赵江滨朱风绅周建林
舰船科学技术 2020年2期
王宇宫,赵江滨,朱风绅,周建林
(1. 武汉理工大学 能源与动力工程学院,湖北 武汉 430063;2. 国家水运安全工程技术研究中心 可靠性工程研究所,湖北 武汉 430063)
0 引 言
AUV(Autonomous Underwater Vehicle)等小型海洋航行器作为海洋中的移动平台在与海洋相关的诸多领域有着极为广阔的应用前景[1],但其动力源主要依靠航行器自身携带的蓄电池,续航力低。在现有的新能源解决方案中,波浪能不受时空限制,潜力巨大,已经有船舶利用波浪发电的方案[1]。传统研究将波浪能转换装置内置于航行器壳体中,依靠惯性发电,产生电能较少[1,3]。有一种新的摆翼式波浪能发电小型海洋航行器的研究方案,通过航行器两侧摆翼振动,使航行器在海洋波面运动中发电,相较内置式发电能力更强。设计对波浪能发电航行器实况海测前的模拟实验能够降低成本并提高开发效率。如何模拟真实海况下的运动十分重要。
目前针对波浪能发电装置模拟实验主要有以下方法:造波技术,数值波浪模拟,物理实验平台。造波技术是通过水池造波模拟真实海况,有荷兰海事研究所的MARIN 海洋工程[4]等。这种方案一般实验成本高,为消除二次反射波影响规模设计也比较大。数值模拟方法则是使用数值波浪水池模拟波浪以及波浪与结构物的相互作用[5,6],但不能对实物硬件与电气进行测试。物理实验平台多针对发电模型,设计相对应实验系统,杨绍辉等[7]设计了多点直驱式波浪能发电系统物理实验平台,齐家龙[8]研究了浮力摆式波浪能发电装置实验平台。目前这些平台是通过数值模拟方法
或莫里森公式计算发电装置处于固定状态时的受力[9,10],将计算结果作为实验平台输入,然后将控制目标输出至驱动系统带动发电装置运转。但实际海况下发电装置受力会因位置变化、结构特性以及实际载荷等因素,与理想计算结果有所偏差[10]。针对所制作的摆翼发电航行器实物样机,提出了一种新的无水实验系统。通过研究航行器发电原理,建立其在海洋中运动学模型,通过在实际中匹配其关键参数来模拟波浪与航行器相互作用,复现航行器在波面处的运动状态使航行器更接近真实海况受力,以测试其发电能力。
1 工作原理
1.1 波浪能发电航行器模型
图1(a)为摆翼式波浪能发电海洋航行器设计模型,通过在小型海洋航行器壳体两侧加装一对摆动水翼结构,捕获波浪力,传递到内部发电装置。图1(b)为航行器发电时的运动状态,摆翼式波浪能海洋航行器浮于水面或近水面时,波浪起伏波面位置发生变化,驱动两侧水翼上下摆动,通过传动装置,进而驱动发电机发电。航行器摆翼轴的两端装有扭转弹簧,弹簧两端分别固定于摆翼和机体,为摆翼与机体相对运动时提供给回复力。内部传动装置则采用双向变单向齿轮箱,使摆翼相对机体的上下运动均能发电。
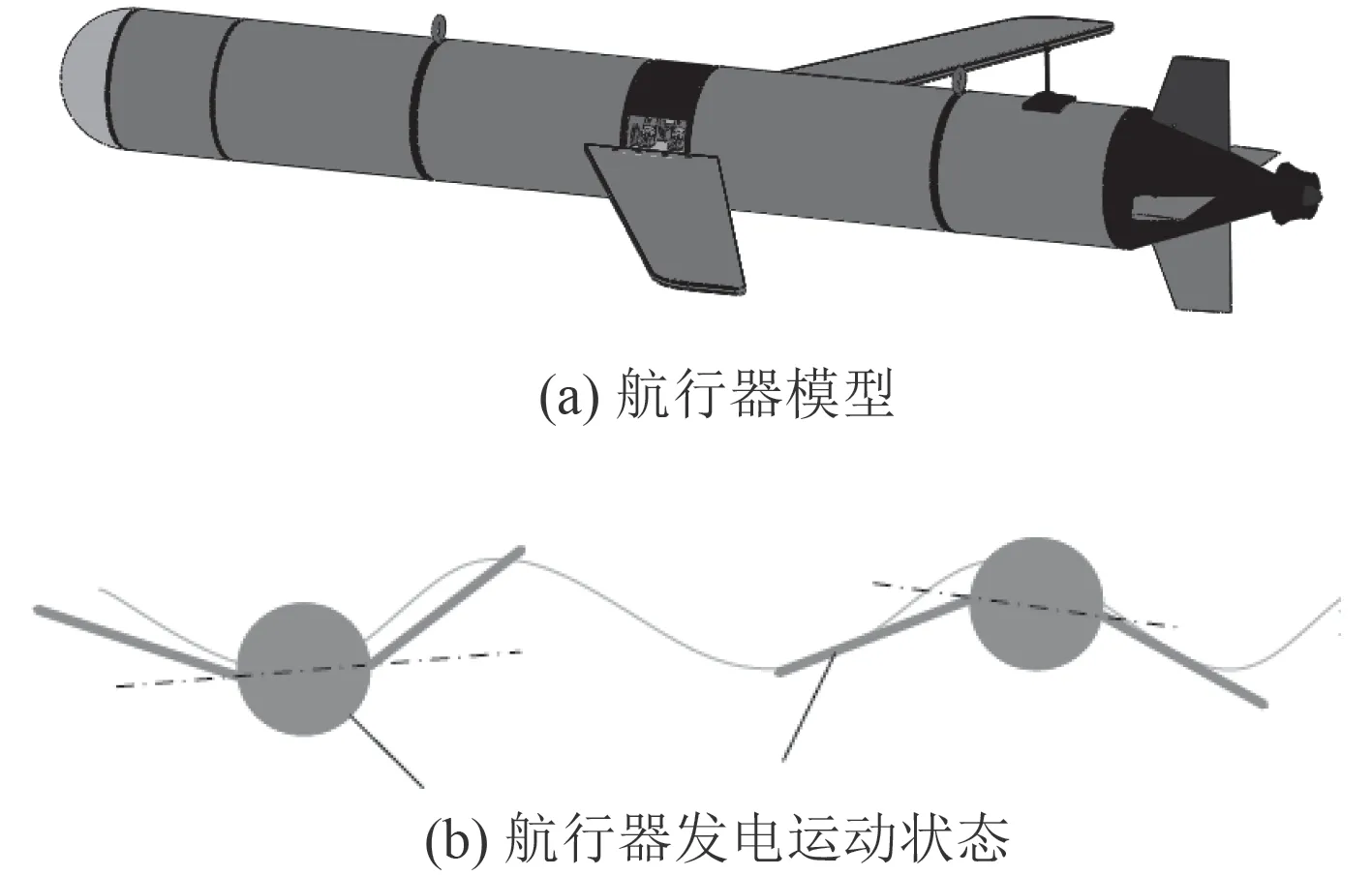
图 1 摆翼式波浪能发电海洋航行器Fig. 1 The flapping-wings wave-powered AUV
1.2 运动学模型
根据波浪基本理论,波浪的能量主要集中于自由表面附近,随着与水底距离增加呈指数型递减。常深度二维小振幅推进波波面方程表示为[9]:

式中: f(x,t) 为波浪运动状态, x 和 t 分别为位置与时间, H 为波幅, k 为波数, ω为波浪角频率。以右手坐标系, x-y 平面在海面上, z 轴向上,波浪沿 x轴正向传播,通过速度与速度势弥散关系,可得到波浪流体质点(x,z)处的速度分量为:
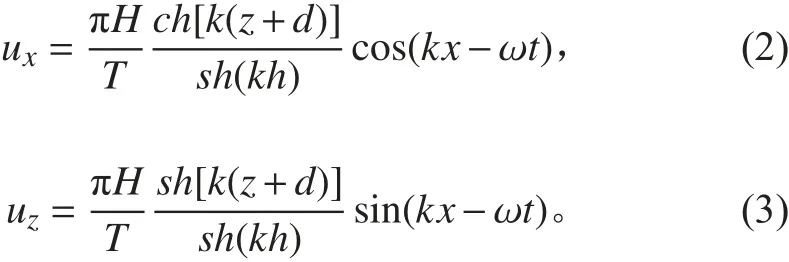
式中: ux, uz分别为水质点的水平与垂直方向的速度分量, d 为水深。
分析航行器在海面受力情况,由于航行器摆翼与机体发生相对运动,故将航行器分为3 部分考虑,航行器在波浪中主要受到波浪激振力、浮力,阻尼力,水的附连质量效应引起的惯性力等力的作用。作用于航行器的激振力由于波浪水质点运动引起,根据式(3)此作用于摆翼与机体的激振力具有相同周期但有相位差。机体相对于海面的位置变化也会引起浮力变化,可等效为弹簧作用。阻尼力由于水的粘滞性而产生,可等效为阻尼器。
综上,航行器波浪能发电本质上是一种受迫振动,通过机械振动理论建立其三自由度动力学模型,如图2 所示。

图 2 航行器振动模型Fig. 2 Vehicle vibration model
图中, x1, x21, x22分别表示机体与摆翼在激振力作用点受迫振动响应; m21, m22表示两侧摆翼; m1表示机体; f1为 作用于 m1上 的激振力, f21, f22分别为作用于 m21, m22上的激振力; k1为航行器所受浮力与重力等效弹簧刚度系数; k21, k22为摆翼与机体扭簧在激振力作用点等效弹簧刚度系数; c1为机体与海洋阻尼力产生的阻尼系数; c21, c22为为摆翼与机体结构阻尼系数,主要由负载形成,即发电机的电磁转矩。
1.3 系统原理与设计
由振动模型设计实验系统台架,如图3 所示。航行器发电主要依靠水质点垂直方向的运动,分别在机体与摆翼垂直方向接上钢丝绳。以往实验系统通过变频器控制伺服电机变换扭矩,进而使液压系统输出符合数值模拟或者公式计算的作用力。该系统通过控制伺服电机转速按照式(2)规律变化经传动机构带动钢丝模拟波面水质点运动,通过这种方式复现航行器在实际海况下的受迫运动。钢丝与摆翼连接点即为整体激振力等效作用点。
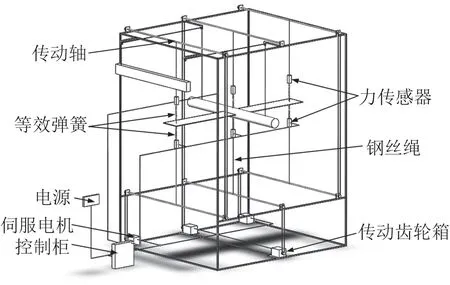
图 3 实验系统台架设计Fig. 3 The design of testing system bench
真实模拟波浪与装置相互作用的关键在于在实际情况下匹配其模型参数。运动过程中3 个驱动单元可视为波浪表面3 点,其相位差 Δφ为:

式中: L为波浪波长; Δx为两连接点距离。
航行器与摆翼间使用扭簧,实验中若采用直连的方式,则摆翼运动轨迹与波面相同。为达到实际运动中摆翼呈现的简谐振动,实验中连接于绳的等效刚度弹簧替换扭簧。其中航行器漂浮于水面时,相较于浮力,惯性力和粘性力很小,可以忽略。则弹簧刚度系数及阻尼系数为:
式中: ρ为海水密度; A为航行器横截面积,为计算方便,取机体最大处横截面积; kt为扭簧刚度系数。 C表示发电机阻尼系数; n为发电系统传动比。
令通过Lagrange 方程建立运动数学模型为:

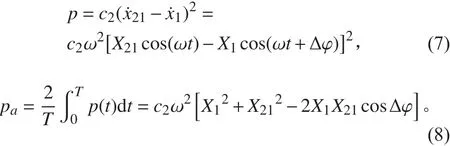
运动响应 {x1,x21,x22} 的 振幅为 { X1,X21,X22},系统产生能量主要由阻尼器吸收,可得实验系统下发电系统单侧摆翼瞬时发电功率 p 与整体平均功率 pa为:
2 功能实现与实物模型
2.1 系统功能关键技术
系统主要包括两部分功能。
1)波浪模拟
实验系统能够通过电机控制传动机构模拟波浪运动。本实验系统的电机控制采用典型的由“PC+运动控制器”构成的控制系统[11]。伺服电机为ECMAC20807RS 型交流永磁同步伺服电动机,并选取与电机匹配的ASD-B2-0721 型伺服驱动器构成闭环。运动控制器为IMC 系列运动控制卡。为模拟波浪按照式(3)运动,控制电机执行圆弧插补指令。将映射为Y 轴的轴端口输出至伺服驱动器,则伺服电机输出位移轨迹为余弦运动。其中指令半径 r 与轨迹生成速度v 为:

式中: S 为转动一圈需要脉冲数; P 为螺距; R为进给倍率。
2)数据采集
为研究航行器发电能力和发电效率,需要定时采集其产生的电流、电压和获得的波浪激振力。作用力数据采集6 个测力传感器分别装于摆翼与机体上下,通过上下之间差值计算航行器所受合力状况。基于采集量的不同,使用2 种采集模块,ADAM-4017 采集作用力数据,ZH-42243 采集电流电压数据,通过不同物理串口接入上位机。两模块均采用标准RS-485 总线接口和MODBUS-RTU 协议[12]。系统主机为PC 端,数据采集模块作为从设备,使用功能码0x03(读取保持寄存器)来获取相应需要数据。
2.2 上位机系统
上位机系统使用C#编程语言,结合Visual Studio 2010 的窗体界面的设计工具实现上位机软件设计[12–13],能够对IMC 发送指令,处理采集信号,进行相关参数的设置以及数据存储、显示。针对实验平台多任务、实时性的工作特点,在设计程序时采用多线程技术。系统界面如图4 所示。

图 4 系统界面Fig. 4 The system interface
系统主界面功能如下:1)波浪参数设置;2)电机控制;3)数据曲线显示;4)波浪参数、力、电压、电流、功率实时显示;5)模块故障报警;6)历史数据存储与文件查看。
2.3 实物结构
实验平台实物结构如图5 所示。主要包括4 部分:实验台架,运动控制柜,数据采集模块和上位机模块。
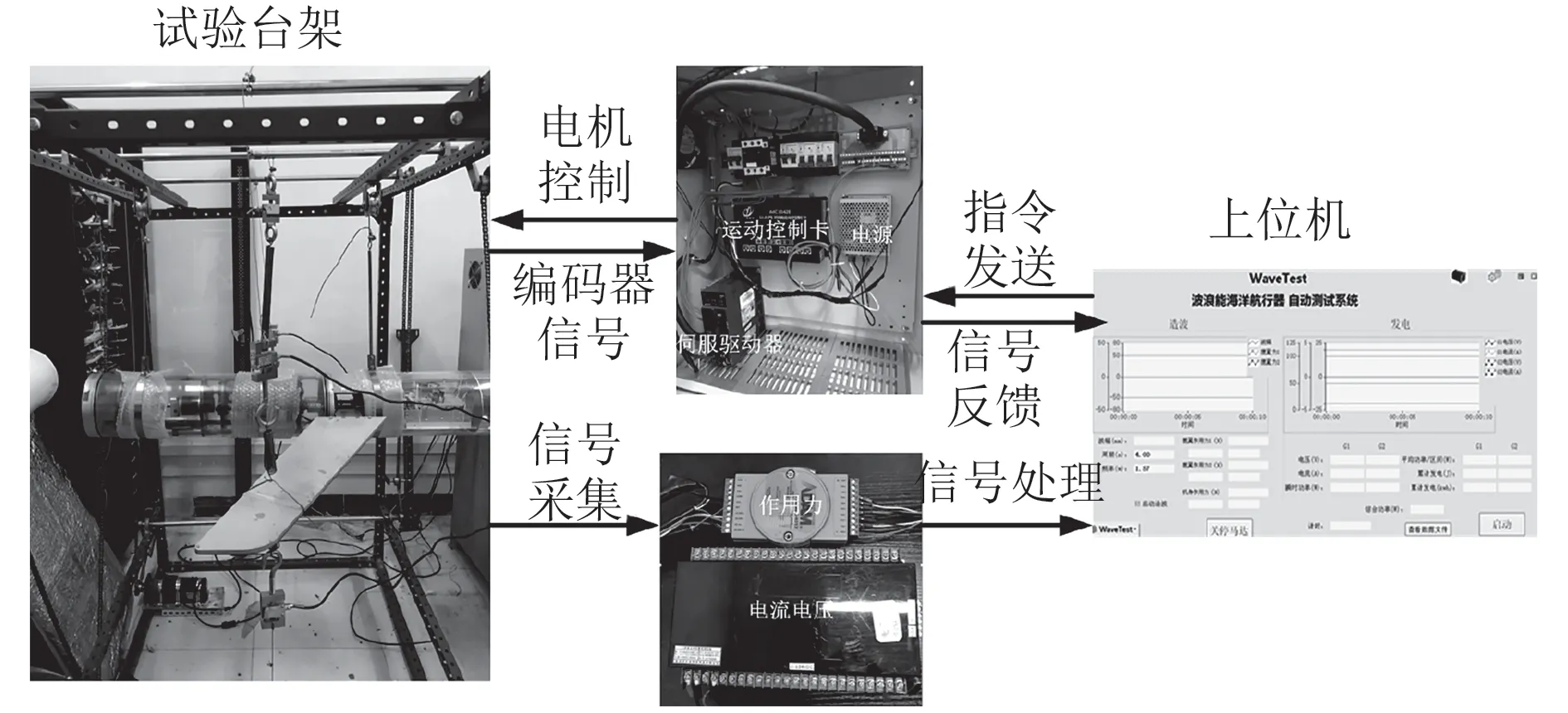
图 5 实验系统结构Fig. 5 The structure of testing system
无水实验系统台架部分总体长1.5 m,宽1.1 m,高1.7 m。电机的输出轴与减速器相连接。减速器输出与链条连接至旋转轴,旋转轴为直径为20 cm 的高碳钢材质光轴,光轴上缠绕线径为1.5 mm 的304 不锈钢钢丝绳与摆翼相连接。
3 实验验证
3.1 CFD 仿真
为同以往以数值模拟计算作用力为输入量的实验系统进行对比,先进行相应仿真实验。航行器样机长1.75 m,直径0.2 m,重60 kg,摆翼为翼展1.2 m,翼弦0.2 m,掠角30°,质量2 kg。通过Solidworks 对航行器进行建模,导入STAR-CCM+进行波浪受力计算,按照国际拖曳水池会议(ITTC)[10]对于存在入射波的模拟,入口边界应位于距离船体1~2L,而出口应位于下游3~5L,以避免来自边界壁的波反射。计算选择N-S 方程作为控制方程,选用SSTk -ω 湍流模型,建立三维数学模型进行模拟求解。为保证重叠网格的重叠区足够大以传递数据,依据波长来设定计算域,计算域网格划分如图6 所示。长16 m,宽4 m,高6 m。

图 6 计算域网格划分Fig. 6 Meshing of Computational domain
采用2 级海况波浪参数,分别取波高为0.4 m,0.5 m,0.6 m,0.7 m,0.8 m,周期均为3 s,即波浪圆频率为2.094 rad/s,波速均为4.68 m/s,共5 组波浪参数进行计算。
3.2 无水实验
实验系统同样设定仿真中5 组波浪参数进行实验。在数值仿真中,航行器摆翼的表面压强分布均匀,因此选择波浪激振力作用点于摆翼形心, Δx为0.62 m。发电机为额定功率200 W,额定电压12 V,额定转速600 r/min 的三相永磁同步交流发电机,发电装置传动比为30,阻尼由文献[5]中公式计算。取水密度为1 000 kg/m3。参数计算如表1 所示。

表 1 实验系统参数Tab. 1 Testing system parameters
选择刚度相对应的弹簧加装在装置上。设定波浪周期为3 s,定时采样间隔设定为0.5 s,并在IMC 有转速信号反馈时数据采集启动。图7(a)为波高0.6 m时仿真与实验时摆翼受力随时间变化的关系,摆翼受力变化趋势基本按照波浪规律变化,但是仿真过程中摆翼受力峰值能够达到70N 左右,而实验值在40~60 N之间,说明实际海况下发电装置的位置变化导致的有效受力面积变化对航行器捕获波浪力造成了影响。图7(b)为5 种波况下,仿真与实验时摆翼受力平均峰值的对比。可以发现,数据变化规律大致相同,装置获得的波浪力小于仿真值,若以仿真值作为输入会导致输出发电能力大于实际值。说明这种实验系统方案对于发电能力的测试更加精确。
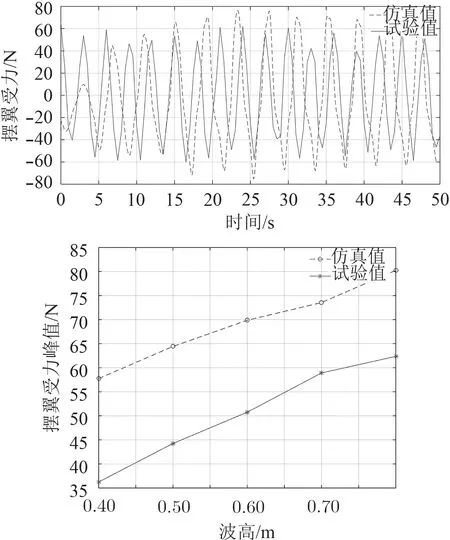
图 7 仿真与实验结果对比Fig. 7 Comparison of simulation and test results

图 8 波幅0.6 m 时航行器实验输出功率Fig. 8 The AUV test output power when the amplitude is 0.6 m
图8 为波高0.6 m 时航行器输出功率随时间变化关系,主要在1~4.5 W 之间。由于航行器两侧摆翼运动存在相位差,发电装置在稳定波况下无零点输出,这样对于电能处理和蓄电设备的安全健康管理有着很大便利。功率输出结果说明了这种实验测试系统的正确性。在测量摆翼与机体位置变化幅度后可由式(8)得到输入功率,从而与实测功率对比得到航行器发电效率。
4 结 语
本文提出了一种陆上模拟波浪的摆翼式发电海洋航行器无水实验系统方案。通过研究航行器发电原理,考虑实际海况下的运动位置变化引起的受力影响,依据波浪理论和机械振动理论,建立运动学模型。研究模型参数与实际方案参数匹配关系,完成了无水实验系统的设计。依据设计方案,结合硬软件技术,搭建了实验系统。最后,设计数值仿真与实验。受力结果的对比证明了摆翼因位置变化导致的受力有效面积变化会导致受力减小,说明这种设计方案更接近真实工况。实验稳定输出功率证明了实验系统的正确性。
无水实验系统能有效避免造浪过程中可能出现的波浪二次反射,有效地模拟出海浪的运动,并且在经济性、可操作性、可移动性方面具有巨大的优势,但模拟波浪波高受规模限制,更多波况研究需要更大规模以及相应强度校核。
猜你喜欢
学苑创造·A版(2022年4期)2022-06-18 11:22:44
疯狂英语·新读写(2021年6期)2021-08-05 07:49:10
当代陕西(2020年24期)2020-02-01 07:06:46
小哥白尼(趣味科学)(2018年12期)2018-12-18 02:13:58
科技创新导报(2017年18期)2017-09-09 02:52:23
舰船科学技术(2017年7期)2017-08-02 07:48:34
中学生英语(2017年6期)2017-07-31 21:28:55
青年歌声(2017年6期)2017-03-13 00:57:56
中国航海(2014年1期)2014-05-09 07:54:24
筑路机械与施工机械化(2014年5期)2014-03-01 02:59:34