
基于ANSYS的20英尺船用集装箱转运装置的分析与设计
2020-04-15 14:59:51杨晓一郭光辉
机电设备 2020年1期
杨晓一,郭光辉,郑 俊
(1.中国船舶及海洋工程设计研究院,上海 200011;2.上海海迅机电工程有限公司,上海 201111)
0 引言
随着改革开放的不断深化和经济的快速发展,我国船舶工业得到了快速的发展,但在船用集装箱短途运输领域,船用机械装备和技术的发展有限。船用和港口集装箱装卸技术水平不够先进,绝大多数集装箱运输车辆本身不具备自装卸能力,需要依靠其他机械或人工辅助装卸,这降低了集装箱的转运效率,还在转运和装卸过程中产生大额的装卸费用。近年来,我国也大力发展了船用集装箱运输辅助行业,研制了大型叉车、正面吊、起重机等机械装备,但复杂的船用运输环境制约了这些大型装卸设备的使用。针对这个问题,本文设计了一种船用集装箱自装卸装置,其具有装卸效率高、运营成本低、安全、可靠、应用范围广等特点,对我国现阶段船用机械装备业的快速发展有一定的促进作用。
1 集装箱转运装置主要技术参数
20英尺船用集装箱转运装置总体性能参数如下:额定搬运质量为 20 000 kg;整备质量为10 000 kg;后轴距为4 030 mm;左右转盘距为1 400 mm;左右轮距为1 000 mm;整车长度为7 025 mm;整车宽度为2 800 mm;整车高度(不装载集装箱时)为1 100 mm;整车高度(装载集装箱时)为3 550 mm;最小离地间隙为320 mm。
2 集装箱转运装置的功能特性
2.1 功能特征
该转运装置应能实现 20英尺集装箱、方舱等物资在各类船舶甲板以及码头的水平转运,并能借助20 t防爆货物升降机等实现20英尺集装箱、方舱等的垂直转运。
该装置的基本功能如下:
1)转运能力:可转运额定质量≤20 t的 20英尺集装箱1只。
2)在九级海况下安全系固。
3)在平静海况下(横倾不大于 5°,纵倾不大于2°)能够正常操作使用。
4)拥有2种行走方式:(1)自行走,在转运装置满载的情况下,能借助牵引力不大于 100 kN的外部牵引载荷顺利爬坡;(2)绞车牵引,在转运装置满载的情况下,能在牵引力不大于15 kN的外部绞车牵引下顺利行走于各甲板面。
5)刹车:自行时,实时控制车速;牵引时,与叉车同步。
6)驻车:停车时驻车,与行走机构联锁;车辆爬坡或下坡过程中若失去动力,能防止车辆滑下斜坡。
7)装卸:借助自身装置,机构实现集装箱装卸时的提升、下放、找准对中和微调等。
8)操作:通过遥控盒控制转运装置进行自行走、刹车和转向,遥控盒有急停按钮,在紧急情况下可执行刹车锁死;车两侧配急停按钮。
9)信号:遥控盒显示屏可显示故障报警(如加热器故障等)和运行状态(如油位、电源、速度、压力、角度等)等;面板可显示当前运行状态,包含当前处于前进还是倒车,自行走还是无动力牵引,并可以显示速度、轮胎转角等状态信息;装置具有综合声光报警功能,并能消音;转运车车体有转向灯、倒车灯等警示灯。
10)联锁:驻车和运行联锁;运行和装卸联锁;自行走和叉车牵引联锁;遥控盒有防止误操作功能。
11)转向能力:装置自行走时,能够实现同轴车轮同步转向;装置具有全驱能力,各轮组有独立驱动能力;各轮胎能独立转向,装置能横向平移、原地回转、前进后退等。
12)通行能力:装置能顺利通过舷侧门、跳板和坞舱斜坡。
2.2 技术特性
20英尺船用集装箱转运装置应具有体积小、重量轻、操控灵便等特点,并能够转运最大质量不超过20 t的20英尺集装箱、方舱等包装物资。在平静海况下,使用该装置可在码头和船、船内部间转运集装箱。
该装置的技术特性如下:
1)防爆要求:距甲板以上0.5 m范围内1类防爆;除距甲板以上0.5 m范围以外区域2类防爆。
2)20 t满载时,装置在各路面上的自行走额定速度为3 km/h,最大速度为4 km/h。
3)绞车牵引转向时,转弯半径约15 m。
4)通行能力:轮压最大轴载荷≤14 t;轮压≤1 000 kPa。
5)越障能力≥0.1 m。
6)越沟能力≥0.1 m。
7)同轴车轮同步转向角度≥90°。
8)单次持续工作时间不小于4 h。
9)爬坡:20 t载重时,使用不大于100 kN牵引力的绞车协助爬坡时,可爬上坡度不大于18°的斜坡;自行走时,可爬上坡度不大于5°的斜坡。
10)噪声:额定工况下,整车空气噪声≤90dB(A)。
3 集装箱转运装置的结构原理
本集装箱转运装置分为上车和下车2部分。下车部分为转运车底盘,采用平板车形式,共采用4组独立的转向驱动单元,前后各有2组独立转向驱动单元分别置于盘式转向架上,可以满足牵引转向的需要。下车中间部分为发动机动力总成及液压系统。上车部分为集装箱自装卸装置,利用自身机构即可完成装卸。上车自装卸装置可与下车分离,下车单独作业。整车采用遥控操作方式,可实现各种操作功能,装置采用整车防爆措施。转运装置组成部分见图1,总体布置图见图2。
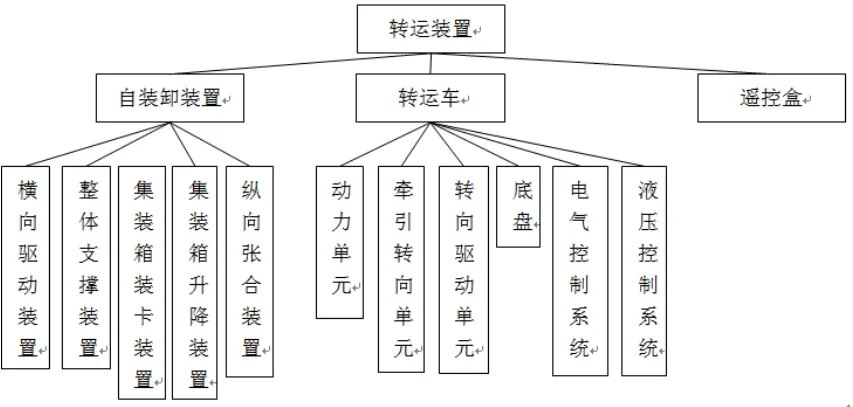
图1 集装箱转运装置组成
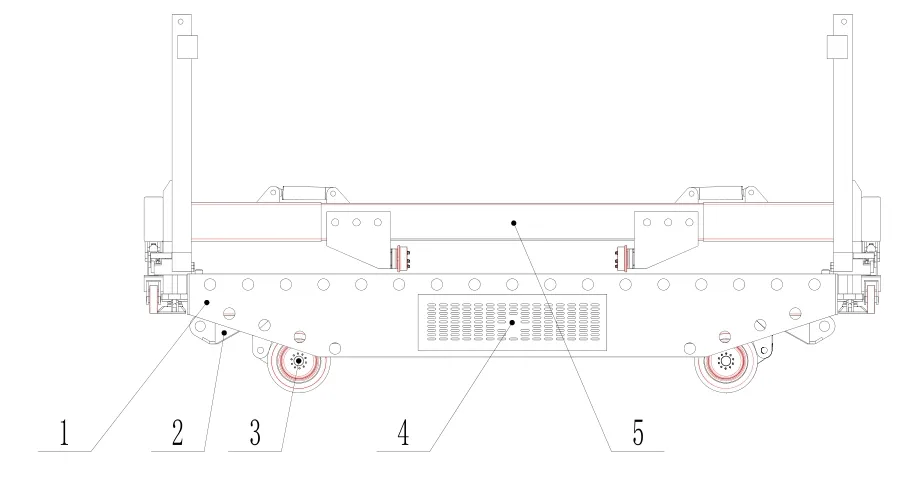
图2 集装箱转运装置总体布置图
3.1 自装卸装置
集装箱自装卸装置可以与底盘分离,此时车辆只有运输功能。该装置采用U型框架结构,具有横向驱动、纵向张合、整体支撑、挂点锁定和整体提升的功能,其结构如图3所示。
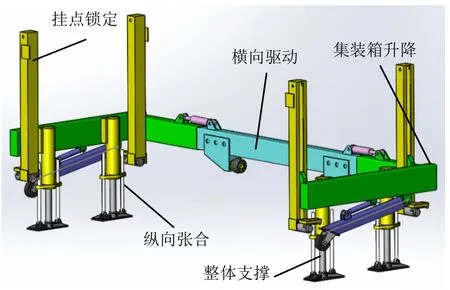
图3 自装卸装置结构图
1)横向驱动。自装卸装置采用2个轮边液压马达驱动滚轮在底盘横轨上移动,此时将两端支腿滚轮放置于地面,支撑自装卸装置整体横移出车辆底盘。
2)纵向张合。自装卸装置采用油缸驱动的方式纵向张开和收缩两端横臂,以适应集装箱宽度。
3)整体支撑。采用4个油缸整体支撑自装卸装置。
4)挂点锁定。提升架与集装箱底部挂点联接,可以实现挂点挂入和旋转锁定的功能。
5)整体提升。4个多级缸同步升降,可将集装箱提升至高于转运车底盘的高度。
3.2 转运车底盘
转运车底盘中部布置动力系统和液压系统,车架前后分别通过回转支撑与牵引转向装置连接,牵引转向装置下部左右分别联接4组独立回转驱动单元。自行走时,牵引转向装置锁定,转向驱动单元工作,实现行走和上下坡;绞车牵引时,牵引转向装置工作,实现转向。
3.2.1 行走驱动系统
行走驱动系统主要由变量液压泵、液压马达、油箱、过滤器、传动装置、冷却器和联接管道构成。液压泵和液压马达的壳体上附有补油泵、补油阀、安全阀和变量控制装置等元件,从而构成完整的液压系统。液压泵和液压马达都是精密的部件,为保证其正常运转,维持工作油液的清洁度是至关重要的。为此,车辆的液压系统中安装了2个过滤器。可清洗的吸油粗滤器装于液压油箱内,它可以阻止大尺寸污物进入液压泵吸油管路。在变量泵的补油油路中,安装了精度为10 μm的一次性滤油器,该滤油器安装在变量泵上。为了维持液压系统的正常油温,系统装有带温控器的液压油冷却器,可将液压系统油温有效控制在正常温度范围内。该行走驱动系统可实现一系列功能,主要包括 1)无级调节传动系统的总传动比,连续改变车辆的速度和牵引力;2)变换行驶方向;3)发动机功率与车辆速度和牵引力之间的合理匹配;4)保护发动机和传动系统不过载。
3.2.2 转向系统
转运车有自行走和牵引2种行驶模式。自行走模式下,采用4组独立的转向驱动单元组合完成多种转向动作,如前轮转向、斜行转向、向心转向等。转向系统由转向泵、单稳分流阀(含安全阀)、转向马达等组成。使4组独立转向单元回转至中位,选择转向模式,由控制程序根据转向几何模型控制4组转向单元各自的转向角度和转向方向。将4组独立转向单元锁定,驱动处于滑行状态时,可以采用前后盘式转向架实现牵引过程中的整体转向。
3.2.3 悬挂系统
悬挂系统可通过升降调整底盘高度,确保轮胎与地面充分接触,保持集装箱运输的平稳性。
3.2.4 制动系统
转运车设有2套独立的制动系统。
1)动力制动系统。由于采用可逆向传递动力的液压驱动系统,当变量泵的输出流量少于与实时车速对应的马达所需流量时,马达和泵的功能换位,液压系统将吸收机组动能,通过发动机的动力制动作用使车辆减速;当变量泵的排量为零时,车辆完全制动。闭式油路上的安全阀可防止系统压力过高而损坏液压元件。驾驶员可连续控制车辆从起步加速至某一速度和从某一速度减速至停车的全过程,不仅操作方便,而且不发生零部件的附加磨损。
2)驻车制动系统。马达上装有驻车制动器,由主泵控制油路供油,并由换向阀控制该制动器,接通压力油时解除制动,失压时实现制动。当发动机熄火或行驶液压驱动系统发生故障时,该制动器将自动处于制动状态,从而确保机组坡停不溜车。
3.2.5 应急保障系统
当发动机熄火或行驶液压驱动系统发生故障,制动器处于制动状态时,如果需要移动车辆,必需要解除驻车制动。本车设有手动液压泵、应急解脱阀和截止阀,在液压系统失效时提供解脱驻车制动器的液压动力。
3.2.6 液压系统
行走、转向的液压驱动由液压变速传动装置完成。本车底盘的传动系统中,车辆速度由发动机转速和液压传动装置的传动比(液压马达的排量与液压泵的排量之比)综合调节。在发动机不工作或怠速运转时,液压泵的斜盘倾角为零,没有油量输出,车辆停止。当驾驶员加大油门,使发动机转速上升并达到1 100 r/min~1 200 r/min(起调转速)后,变量泵上的补油泵输出控制油,在控制阀内的节流口两侧建立了足以使斜盘偏转的压力差,液压马达开始旋转,车辆随之起步行驶。发动机转速超过起调转速后,转速的继续升高将通过控制装置使变量泵排量增加。发动机转速增高、液压泵排量增大和液压马达数量减少,这3方面的变化促使车速提高。而当牵引载荷增加到一定程度后,液压反馈系统又能使变量泵排量自动减小,从而降低车速,使发动机不致因超载而熄火。
本转运车的液压驱动系统采用调速柔和、动力制动性良好的闭式油路,故需选用具有双向调节能力和带补油泵的通轴式变量泵,以兼备调速、制动和换向的功能。
该集装箱转运装置转运车部分的液压原理见图4,自装卸部分的液压原理见图5。
3.3 电气控制系统
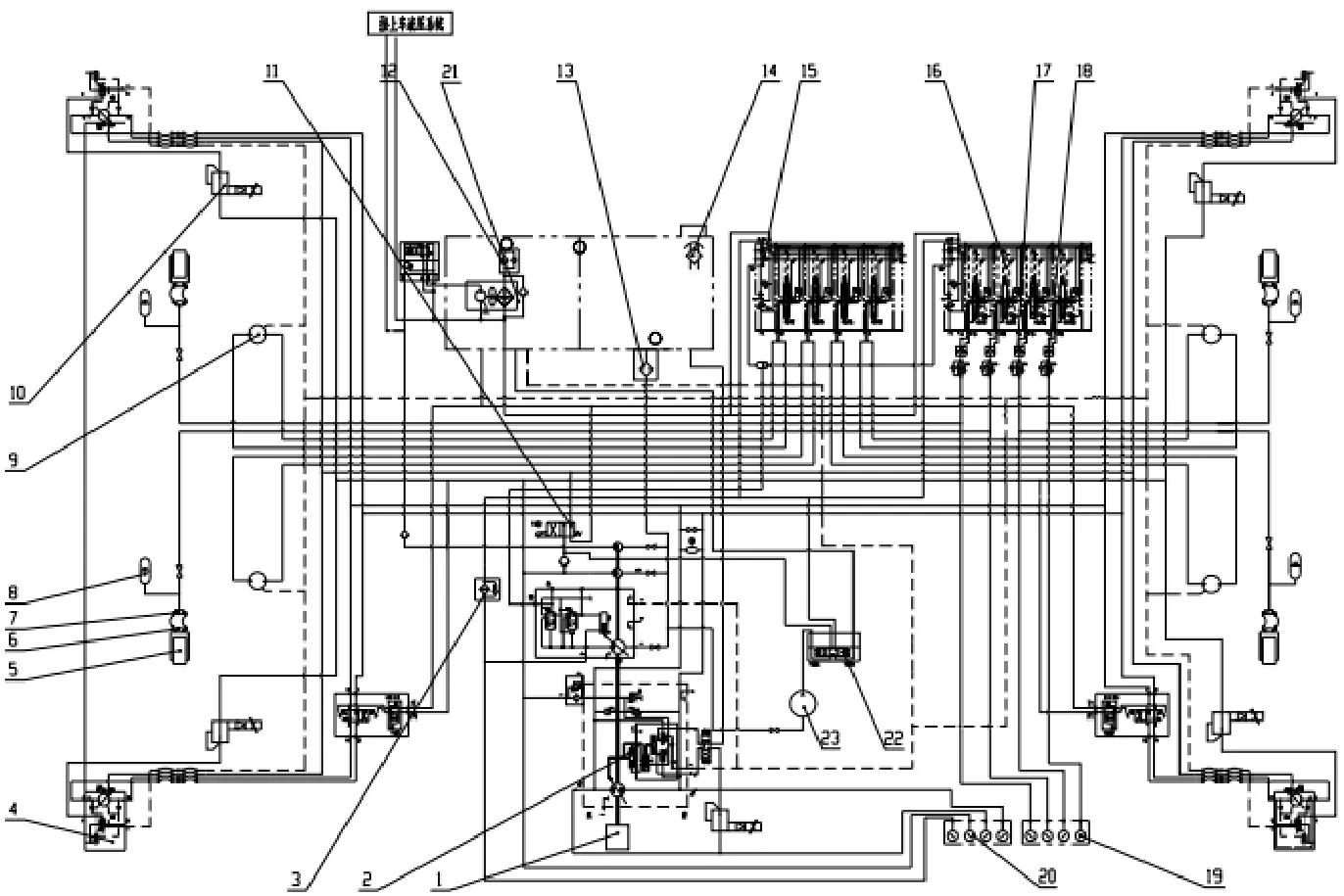
图4 集装箱转运装置转运车部分液压原理图
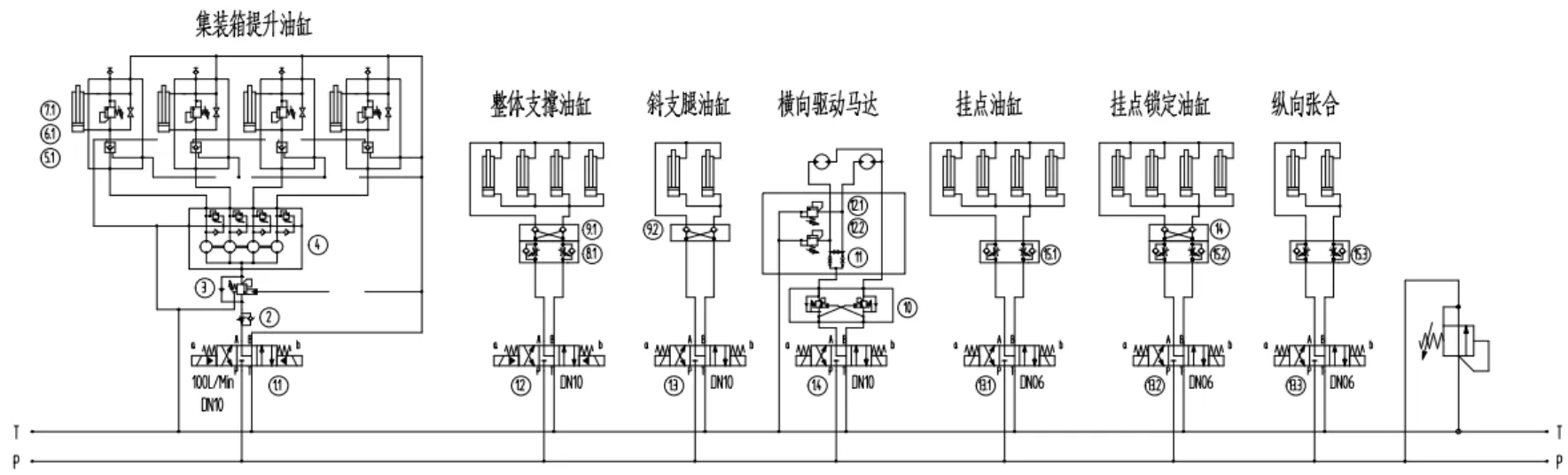
图5 集装箱转运装置自装卸部分液压原理图
该集装箱转运装置的控制系统由电源、微电控制系统、电气操作机构、安全装置等组成。控制系统主要采用 CAN总线分散控制,简化了线束,提高了整车电气线路的可靠性、安全性和可维修性,具有数据共享和配置灵活的特点。CAN总线为车内各种电子设备、控制器、测量仪器等提供了统一的数据交换渠道。控制系统采用工程机械专用控制器,具有可靠性高、控制方便、编程简单等特点。控制系统主要控制液压泵、液压马达和液压阀等执行机构,并可采集压力、位置、速度等信号。电气控制系统具有以下功能:1)控制功能,即对发动机、泵、马达、控制阀和整机进行复合控制;2)检测和保护功能,即通过一系列传感器和开关对发动机和液压系统工作状态进行检测和保护;3)其他功能,包括报警、指示灯控制、发动机启停保护等。图6为该集装箱转运装置的电气控制系统网络图。
3.3.2 防爆系统
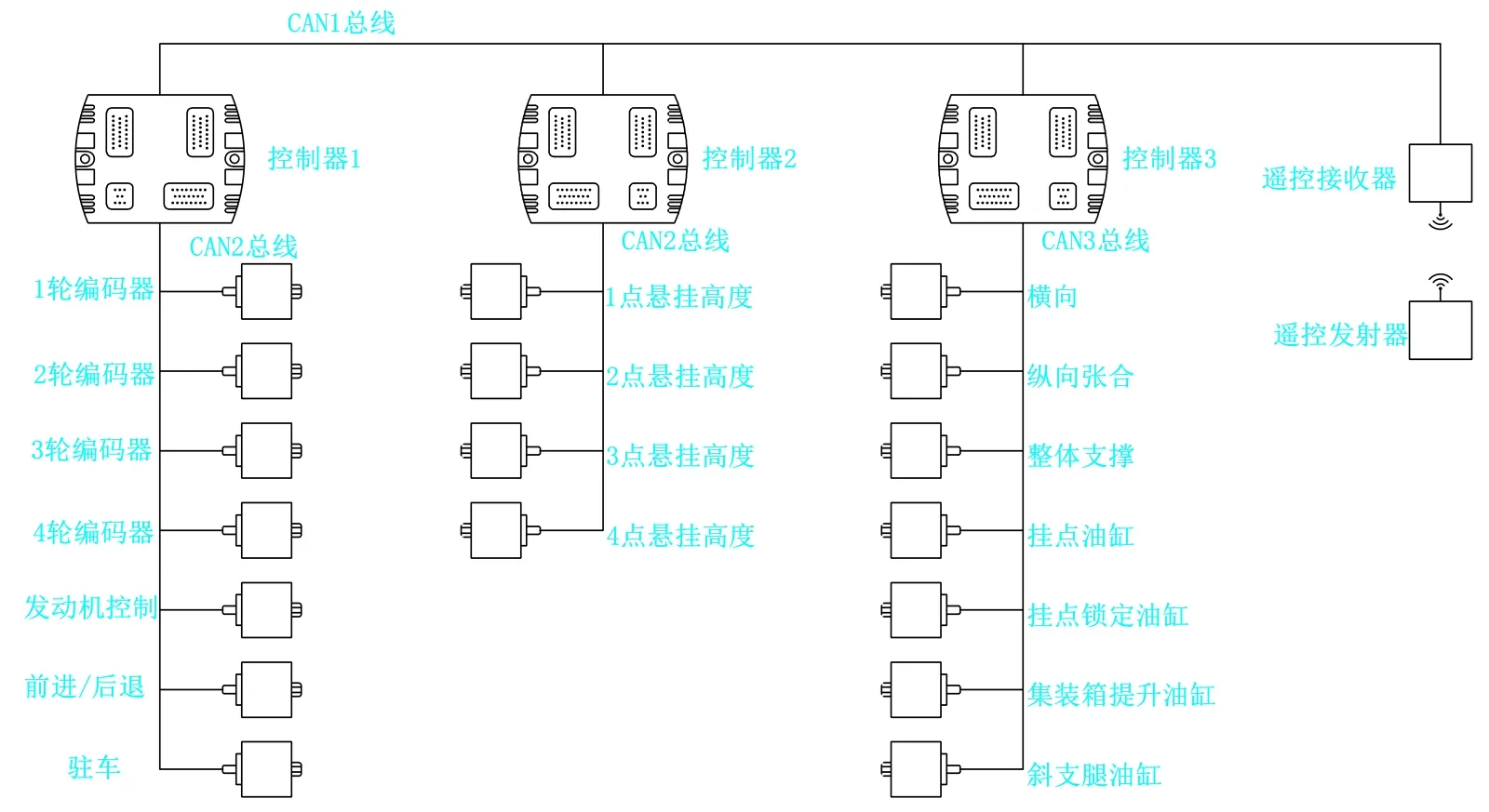
图6 电气控制系统网络图
该20英尺船用集装箱转运装置可在存在易燃、易挥发气体的船舱内工作,其工作环境属于易燃易爆环境,故要求该转运装置具备相应的防爆等级。该转运装置的防爆等级为2级(GB 19854—2018《爆炸性环境用工业车辆防爆技术通则》),可在1区和2区使用;该装置的电气件防爆等级要求是ExdⅡBT4(GB 3836.2—2010《爆炸性气体环境用电气设备第二部分隔爆型“d”》),即采用隔爆(d)的防爆方式;易燃气体组别II B(油气环境);该装置温度组别为T4,表面温度不超过135 ℃。本装置采用经防爆改装、尺寸较小的发动机,其防爆系统如图7所示,可确保安全。
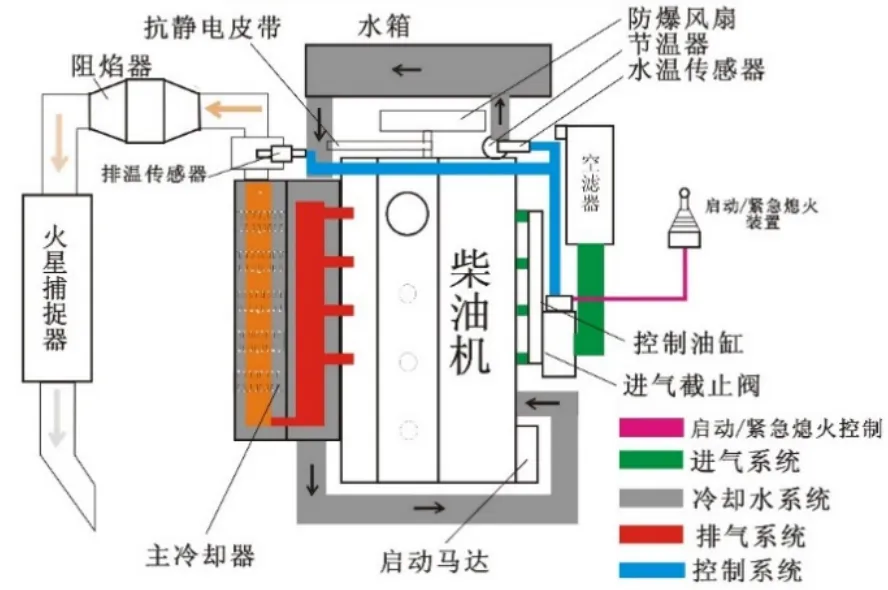
图7 柴油发动机防爆系统
4 集装箱转运装置主要部件的设计与分析
集装箱转运装置的底盘车架和牵引转向装置是主要承力构件,其设计是整车设计成功与否的关键。
4.1 主要部件的结构设计
4.1.1 车架结构设计
车架是整个装置的支承部分,它承受整车的自重及各工况条件下负载的质量,同时,车架将车上载荷传递到前后牵引转向装置,使集装箱转运车稳定地支承在地面上工作。车架的损坏以局部结构的疲劳破坏为主。因此,车架应具有足够的强度与刚度,且机构配置应合理,使车架具有良好的力学性能[1]。
该集装箱转运车车架采用整体布置方式,在进行车架结构设计的过程中首先考虑以下因素:1)保证转运车额定承载时,车架具有足够的抗弯、抗扭能力,工作过程中,各结构件不会发生疲劳破坏;2)保证转运车在额定承载时,整车的纵向结构可以在自重作用下稳定支撑,防止倾翻;3)保证空载时整车重心位于纵向几何中心面内,使整车横向质量分布协调,左右不出现较大的偏载。
转运车车架采用钢板和型材焊接的形式,主体为抗弯、抗扭箱形梁结构,左右结构对称。边梁采用前后贯通的矩形管和整块厚钢板焊接的结构,前后支撑也采用矩形管和厚钢板结合的结构,具有较优的力学性能。
4.1.2 牵引转向装置结构设计
牵引转向装置上部通过回转支撑与车架联接,下部通过2个回转支撑与驱动单元联接,受力情况复杂。其主体采用矩形管和钢板焊接结构,具有较优的力学性能。
4.2 主要部件结构的有限元分析
4.2.1 车架结构强度分析
对车架结构的分析,不仅需要考虑所有的结构件和机构,而且需要考虑作业过程中的不同载荷工况。车架作为整车的主承力骨架,承受着各子结构的静力和动力载荷,同时也承受着来自前后驱动轮、发动机、液压系统和转向装置的作用力。要对其进行静强度分析,首要条件是找出车架的外部载荷条件,即找出与车架相连着的、对车架受力和变形有较大影响的各总成在整车静止状态下作用在车架上的力、力矩(包括其大小和方向)。通过对各总成进行受力分析,即可达到上述目的。对于车架来说,转运车承受集装箱额定载荷20 000 kg时,受力情况最为恶劣。按照工况条件设定配置方式,分析步骤如下。
1)设定模型的材料属性。车架选用Q345低合金结构钢,在SolidWorks中建立三维模型,然后导入 ANSYS-Workbench中,按照所用材料的参数新建一个材料,命名为Q345。设定材料的弹性模量为 206 GPa,泊松比为 0.3,材料密度为7.85×10-6kg/mm3。
2)设定约束和载荷条件。转运车在静止情况下,车架保持水平。选择车架上表面为受力基准面,便于施加载荷时确定载荷方向。在转运车工作过程中,通过前后回转支撑、牵引转向装置和4个独立的回转驱动装置将车架稳定地支撑在地面上。由于分析对象不包含牵引转向装置和4个独立的回转驱动装置,因此可以在前后回转支撑与车架的作用面上施加固定约束,限制其3个平移自由度和3个转动自由度。通过这种方式可以近似模拟前后回转支撑对车架的作用。在底盘上表面加载20 000 kg负载,等效为在车架上表面施加18 405 Pa的均布载荷。
3)网格划分
对模型施加约束和载荷后,开始正式划分网格。由于车架模型结构非常复杂,因此采用实体单元网格类型[2],车架网格划分结果如图8所示。
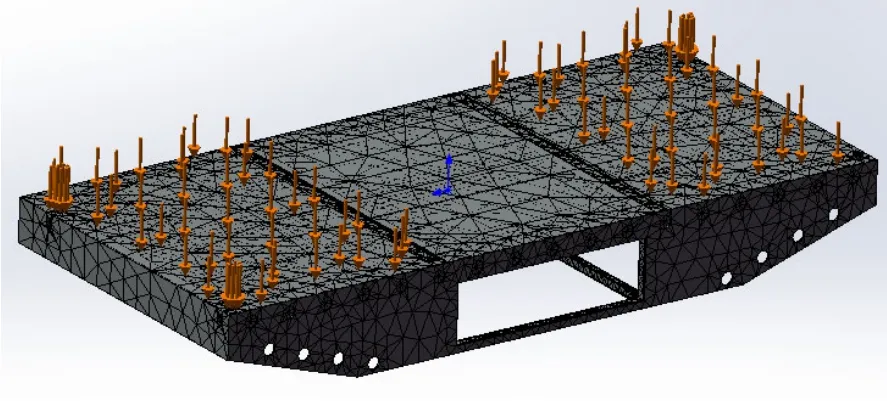
图8 车架网格划分
4)分析结果
图8所示情况是假设车架两侧上表面受力、中部表面不受力的极端情况。从图9所示车架的结构应力云图上可以看出,在该工况条件下,车架最大应力小于 318.1 MPa。而实际情况中车架整个上表面均可分载载荷,受力状况会改善很多。此外,最大应力小于车架材料的极限屈服应力,在实际结构中,焊缝材料会进一步加强该部分结构,且装配的其他零部件均能起到过约束的作用,可大大改善车架的承载能力,因此车架的实际应力会远小于该值[3]。从图10所示车架的结构最大变形云图上可以看出,车架整体变形较小,说明车架结构具有较好的刚性[4]。故此种车架结构满足设计技术要求。

图9 车架结构应力云图
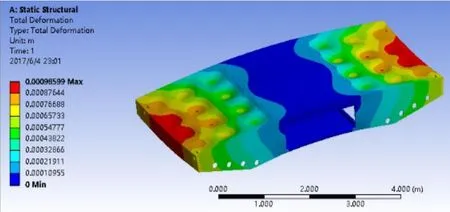
图10 车架结构变形云图
4.2.2 牵引转向装置结构强度分析
底盘的前后牵引转向装置下回转架承载车架上装负载,并通过4个独立的回转驱动单元支撑在地面上。对于牵引转向装置来说,转运车承受集装箱额定载荷20 000 kg时,下回转架受力情况最为恶劣。按照工况条件设定配置方式,分析步骤如下。
1)设定模型的材料属性
牵引转向装置模型的材料属性与车架模型的材料属性相同。
2)设定约束和载荷条件
转运车在静止情况下,车架保持水平。由于分析对象不包含前后回转支撑和2个独立的回转驱动装置,因此可以在2个独立回转驱动装置的作用面上施加固定约束,限制其3个平移自由度和3个转动自由度。通过这种方式可近似模拟2个独立回转驱动装置对牵引转向装置下回转架的作用[5]。考虑到转运车上坡等极端工况下,2个下回转架中仅有1个独立承载载荷,在牵引转向装置下回转架上回转支撑面上加载20 000 kg负载,等效为18 405 Pa的均布载荷。
3)网格划分
对三维模型施加约束和载荷后,就开始正式划分网格。由于牵引转向装置模型结构复杂,因此采用实体单元网格类型,牵引转向装置网格划分结果如图11所示。

图11 下回转架网格划分
4)分析结果
从图12可以看出,在该工况条件下,牵引转向装置下回转架绝大部分区域应力小于1 MPa,最大应力远小于下回转架材料的极限屈服应力。在实际结构中,焊缝材料会进一步加强该部分结构,因此该部分的实际应力会小于该值。从图13可以看出,下回转架结构在此工况下整体变形位移量较小,有较好的刚度。故此结构满足设计要求,且为整车进一步轻量化配置和结构优化留下了很大的空间[6]。
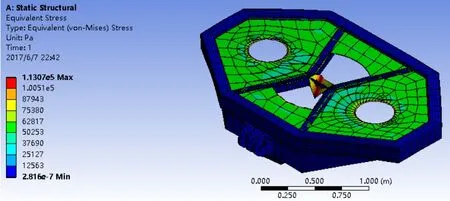
图12 下回转架结构等效应力云图
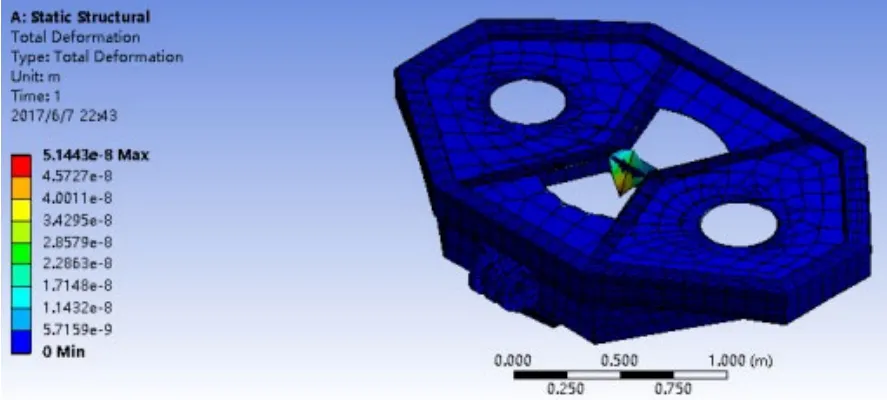
图13 下回转架结构位移云图
5 结论
通过有限元软件对集装箱转运装置关键部件进行计算和分析,优化了该集装箱转运装置的结构形式,减小了其主要部件的结构尺寸,保证了足够的安全系数,提高了其承载能力,增加了该装置的应用灵活性和可靠性。该装置的设计可为船用机械装备的技术创新提供参考。
猜你喜欢
军事文摘(2023年5期)2023-03-27 09:13:10
物流技术与应用(2022年5期)2022-06-17 06:02:34
装备制造技术(2021年4期)2021-08-05 07:39:40
重型机械(2020年2期)2020-07-24 08:16:18
现代装饰(2019年7期)2019-07-25 07:42:10
石油化工建设(2018年2期)2018-07-11 01:24:56
中国自行车(2018年4期)2018-05-26 09:01:43
中国公路(2017年8期)2017-07-21 14:26:20
凿岩机械气动工具(2016年2期)2016-11-11 07:34:04
专用汽车(2015年2期)2015-03-01 04:06:52
