基于增量成本一致性的孤岛微电网分布式下垂控制
2020-04-15 06:41:38张朝霞文传博蔡鹏程
可再生能源 2020年4期
张朝霞,文传博,蔡鹏程
(上海电机学院 电气学院,上海 201306)
0 引言
微网是由分布式电源(Distributed Generation,DG)、储能装置、负荷和控制装置等组成的独立供电系统,可以并网和孤岛运行[1]~[4]。孤岛运行时,通常采用基于下垂控制的多机并联运行方式承担负荷分配,按照额定容量分配有功功率,未考虑分布式电源的运行成本,易使微电网的运行成本偏高。在微网稳定运行条件下,微网运行成本成为了目前的研究热点[5]~[7]。
微电网二次控制可分为集中式控制、 分散式控制和分布式控制。 集中式控制对通信线路的依赖程度较大,并可能存在单点故障,可靠性较差[8]。分散式控制很难实现各分布式电源之间的协调运行[9],[10]。 分布式控制仅依靠局部弱通信就可以实现各分布式电源间的协调控制[11]。 由于传统下垂控制会出现频率偏差,文献[12]提出了频率自恢复和实现有功功率共享的孤岛微网分布式控制方法。 文献[13]针对线路呈阻感特性使低压微网的功率严重耦合,提出了在下垂控制加虚拟负阻抗的方法改善无功补偿与线路压降的问题。 文献[14]在传统下垂控制中,加比例积分与前馈调节改变下垂系数,从而实现负荷的按需分配。 文献[15],[16]利用不同的条件和环境,对微电网的频率使用不同的方法进行研究和控制。 以上文献只考虑了分布式控制中电压、功率与频率的控制,均没有考虑各分布式电源的运行成本问题。 文献[17]将各DG 的增量成本作为一致变量,提出基于一致性算法的分布式调度策略。 文献[18]针对微电网中并联分布式发电单元间功率分配精度差、运行成本高等问题,提出了基于分布式算法的改进经济下垂控制策略,通过增加二级优化控制,达到了调节功率经济运行的目的。 文献[19]针对微网经济运行中功率分配精度问题,提出了分层控制策略,通过三级控制减少电压波动,实现微网功率的最优分配。 以上文献虽考虑了各分布式电源的经济性问题,但很少考虑优化运行控制问题,并且信息交互中未涉及具体的通信过程,缺乏实际应用的支撑。
本文在已有研究基础上,提出了一种基于多智能体系统(Multi-Agent Systems,MAS)增量成本一致性的分布式下垂控制策略。 该策略采用两层控制结构,上层是基于MAS 的通信网络,下层是基于下垂控制的微网。基于此模型,提出增量成本一致性算法,优化下垂控制的参考频率,实现微网运行成本的最小化。 该策略只需智能体之间局部通信,克服了无通信线下垂控制与集中控制的弱点,可靠性高。 最后,本文对所提算法的收敛性进行了证明,并通过Matlab/Simulink 仿真,验证了控制策略的有效性。
1 基于增量成本一致性的分布式下垂控制
1.1 增量成本一致性算法
传统的最优增量成本 (Incremental Cost,IC)由集中控制器计算,存在单点故障和通信开销大的问题。 因此,本文选择增量成本作为一致变量,以分布式的方式求解经济优化问题。 在分布式控制一致网络中,每个分布式电源将根据其邻居的增量成本更新自己的增量成本。此外,选择一个机组作为领导者(Leader)机组,其他机组为跟随者机组。 根据系统的变化,降低或增大系统全局的IC,即当发电机总输出功率大于负荷总需求功率时,就会降低全局的IC,反之亦然。
与传统经济调度方法相同,在增量成本一致性算法中,各DG 的增量成本定义为
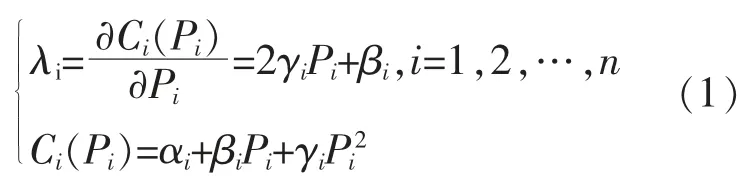
式中:λi为发电单元 i 的增量成本;αi,βi,γi为发电成本参数。
在没有发电容量约束的情况下,当增量成本达到一致时,可以实现最小发电成本的目标,共同的最优解为λ*,目标输出功率为
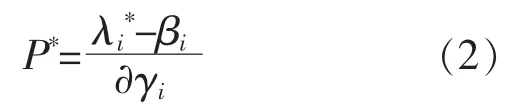
本文提出各发电单元的增量成本一致迭代为
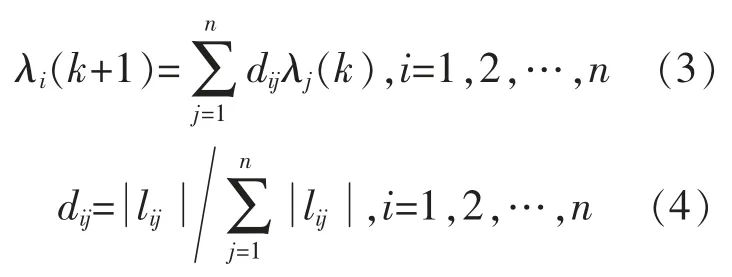
式中:dij为行随机矩阵 Dn的(i,j)项对应的权值,且式(3)是对应着跟随者节点的更新规则。
遵循式(3)系统将会收敛到一个共同的增量成本,收敛速度基于系统通信网络的拓扑结构。此外,为了满足功率平衡约束,本文提出并定义ΔP为全局功率供需不匹配,且
领导者节点的更新规则为
式中:ε 为收敛系数,是正极性的标量,控制系统整体的收敛速度。
式(3),(6)是增量成本一致性算法的数学表达式。 因此,在分布式控制策略中,所提出的增量成本一致性算法的更新规则为
式中:λi(k)为 DGi在第 k 次迭代的增量成本。 输出功率Pi也在增量成本一致性算法中进行更新。
1.2 分布式下垂控制
微网孤岛模式运行时,传统的P-f 下垂控制将根据各发电单元额定功率Pni与下垂系数mi分配有功功率,不能够达到理想的负载优化分配,并且系统稳定时,频率将会偏离额定值。

在微网中各DG 的输出频率fi必须相同,且各额定频率fn都为50 Hz,因此fi-fn为常数。令fifn=k,则由供需平衡关系可知因此由 mi>0 可知,k=0,即从而可得 fi=fn。 因此,所提控制策略能够实现负载的优化分配,也保证孤岛模式下,微网频率稳定在额定值。
本文设计的分布式下垂控制结构如图1 所示。
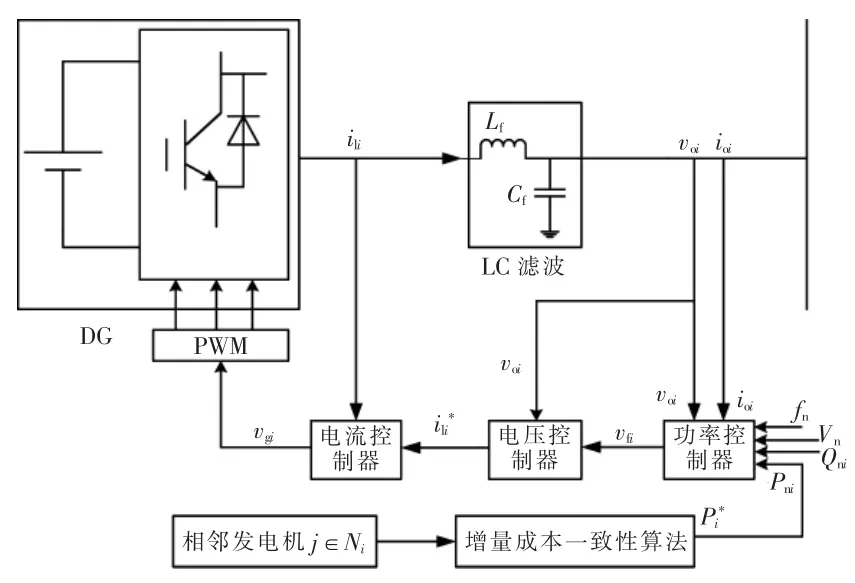
图1 优化下垂控制结构图Fig.1 Optimized droop control structure diagram
由图1 可知,通过增量成本一致性算法对功率值进行更新,得出最优发电量。 由功率控制器计算逆变器输出的功率值,并依据下垂特性得出电压控制环的期望值。
2 仿真与分析
为验证本文所提基于增量成本一致性的分布式下垂控制策略的有效性,在Matlab/Simulink 仿真环境下进行仿真分析。 系统仿真所用的微电网系统结构如图2 所示。 选择DG1 为领导者节点(主电源),用于直接获得供需不匹配量。

图2 孤岛交流微电网仿真结构Fig.2 Structure of island AC microgrid simulink
测试系统有5 个DG,每个DG 的局部负载的额定有功功率分别为2P1=P2=P3=P4=2P5=20 kW。有功功率值的上限分别为 20,30,30,30,20 kW;下限分别为 0.5,1,1,1,0.5 kW。 测试系统的相电压幅值为311 V,频率为50 Hz。 系统的通信拓扑结构如图3 所示。
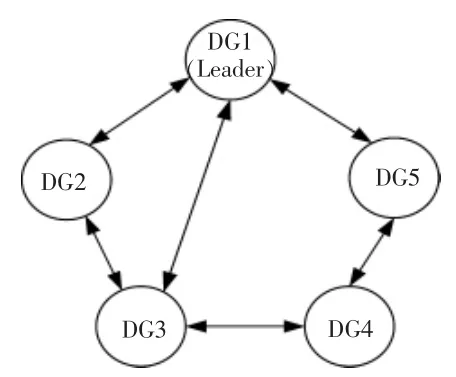
图3 微电网通信拓扑结构Fig.3 Communication topology structure of microgrid
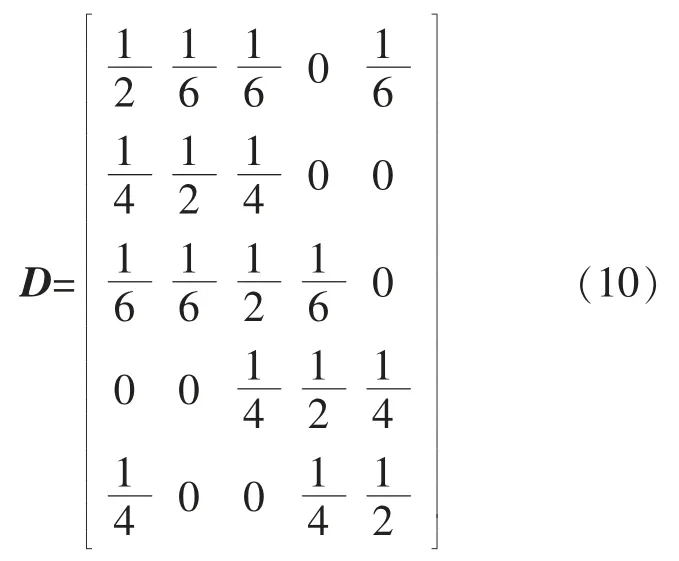
该微电网系统对应的行随机矩阵为
仿真系统中,各DG 的成本参数如表1 所示,各DG 的控制参数如表2 所示。
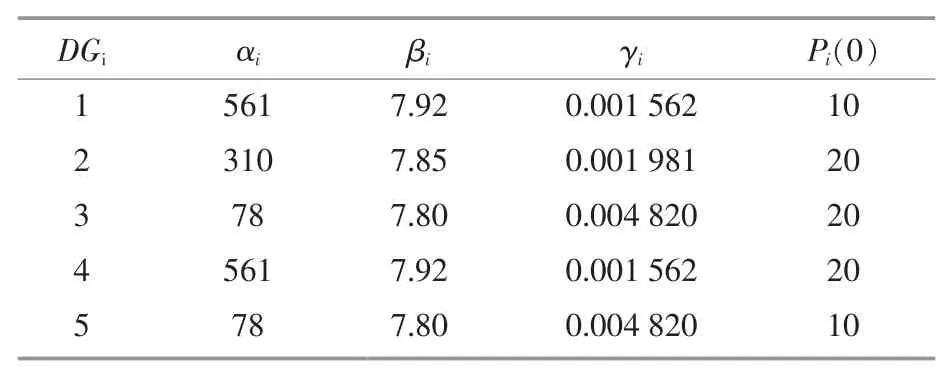
表1 各发电单元成本参数Table 1 Generator cost parameters
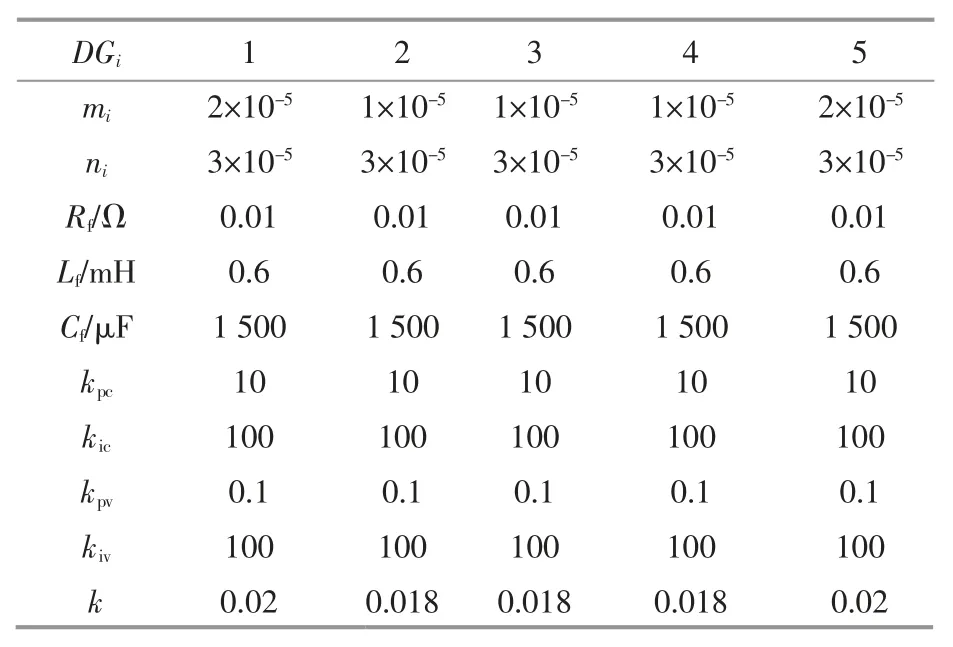
表2 系统仿真控制参数Table 2 Simulink control parameters
2.1 算法的收敛性仿真
在控制系统中,不同的通信网络对应的拓扑结构也不同,算法的收敛速度与系统的拓扑结构密切相关,选择合适的拓扑结构对算法的收敛性以及系统的优化控制效果至关重要。 本文给出了由5 个节点组成的3 种不同拓扑结构的通信网络,如图4 所示,仿真结果如图5 所示,来验证分析拓扑结构对算法收敛性的影响。 其中DGi(i=1,2,3,4,5),以作为收敛判据,其中,ci为DGi的增量成本,cc为增量成本的收敛值。
由图3 中的3 种不同通信网络的仿真收敛情况可以看出,只要通信拓扑对应的拉普拉斯矩阵满足行随机,算法最终都会达到收敛,趋于一致。
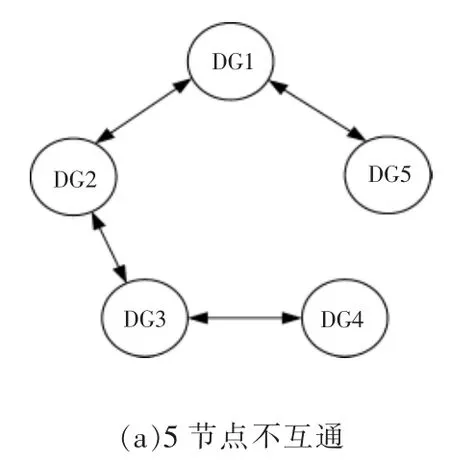
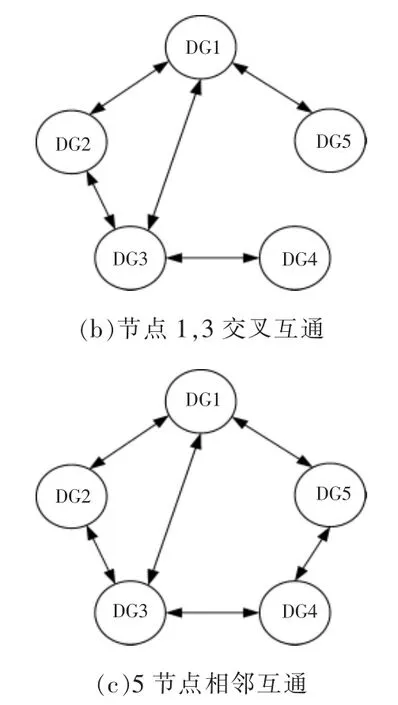
图4 不同通信网络Fig.4 Different communication networks

图5 不同通信网络的仿真Fig.5 Simulation of different communication networks
由图4 可以看出,随着通信线路的增加,系统的收敛速度越快。由图5 可以看出,随着通信线路的断开,虽然系统的收敛时间会增加,但也会趋于一致达到收敛,从而看出该算法具有很好的鲁棒性。
2.2 算例1
在Simulink 下搭建图2 的仿真系统,采用本文所提的分布式优化控制策略,设定微电网t=0 s时孤岛模式运行,同时投入优化控制器,得到的仿真结果如图6 所示。
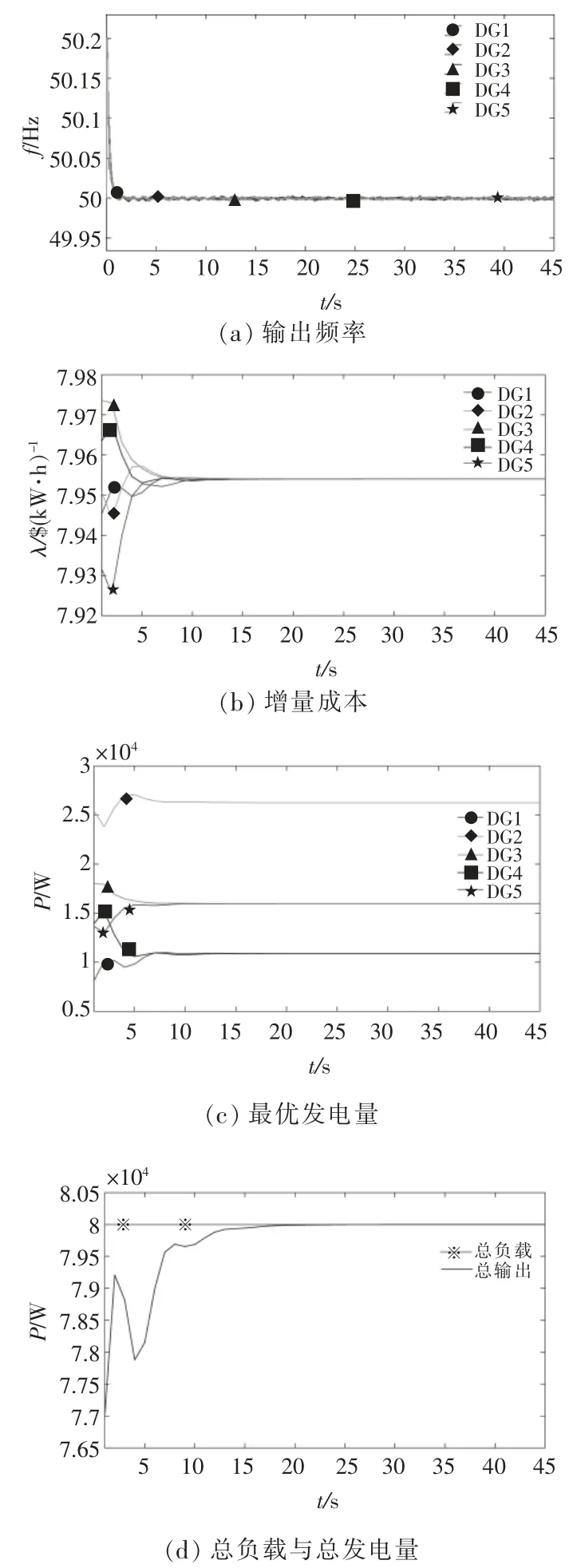
图6 仿真结果Fig.6 Simulation results
由图6 可知,在一致性算法优化下,输出频率很快达到稳定,并最终稳定在额定值50 Hz。在0~12 s,各增量成本收敛到最优增量成本λ*=60.596 8 元/(kW·h),在 15 s 内达到稳定。 当总负载 PD=80 kW,采用传统集中式的拉格朗日乘子法解决系统经济优化,得到的最优增量成本λ*=60.596 8元/(kW·h),对应的最优发电量分别为本文与拉格朗日算法得出的结果相同,证明了该算法的正确性。 总发电量和总负载曲线在稳态时达到了相等,即证实该系统满足供需平衡约束。 本文所提的基于增量成本一致性的优化下垂控制可以实现微电网的优化运行,实现功率的合理分配以及频率的稳定。
2.3 算例2
为验证本文设计的微电网分布式控制策略具备抗干扰能力。 设定微电网t=0 s 时孤岛模式运行,同时投入优化控制,结果如图7 所示。
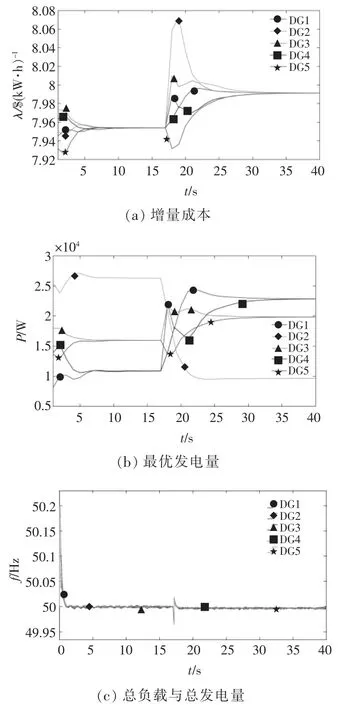
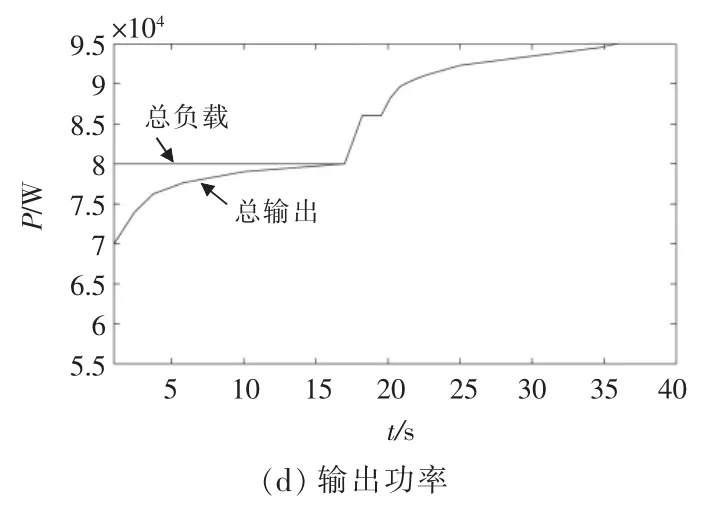
图7 仿真结果Fig.7 Simulation results
由图7 可知,在0~17 s,系统达到平衡稳定之后,电力需求从80 kW 突增到95 kW,即ΔP=15 kW。 各节点的增量成本随着各DG 输出功率的变化而发生波动,最终在t=33 s,所有发电单元的增量成本都收敛到一致最优值 λ*=60.596 8 元/(kW·h)。从而得出各发电单元的最优发电量证明了该控制系统可以实现微电网的经济最优化运行且满足供需平衡约束。在t=17 s 时频率开始波动下降,在优化控制器的作用下,经过短暂的缓冲,频率慢慢趋于稳定,最后稳定在额定值50 Hz,从而可以证明该分布式控制具有一定的抗干扰性。
3 结论
针对微电网经济运行成本及其控制中存在的问题,本文提出了一种基于增量成本一致性的孤岛微电网分布式下垂控制策略。 该策略采用两层的控制模型,基于上层通信网络的一致性解优化第二层的下垂控制,实现功率的合理分配及频率值的稳定,达到经济优化运行的目的,使运行成本最小化。 利用仿真对算法的收敛性以及鲁棒性进行了证明,通信网络无需强连通,各DG 仅通过稀疏通信,就可以达到稳定收敛的效果,减少了控制系统对通信网络的依赖性。 通过对该控制策略进行仿真,证明了该方法可以实现各发电单元的优化运行,且保证了微电网的频率稳定在额定值,仿真案例进一步证明了该策略的有效性。
猜你喜欢
当代陕西(2022年6期)2022-04-19 12:12:22
能源工程(2020年6期)2021-01-26 00:55:22
中学生数理化·中考版(2019年9期)2019-11-25 09:39:44
山东冶金(2019年3期)2019-07-10 00:54:04
消费导刊(2018年10期)2018-08-20 02:57:02
电信科学(2016年9期)2016-06-15 20:27:25
通信电源技术(2016年6期)2016-04-20 06:21:15
通信电源技术(2016年1期)2016-04-16 04:57:26
电测与仪表(2015年16期)2015-04-12 00:44:34
电子设计工程(2015年16期)2015-02-27 12:07:58