一类基于四面体组合单元的模块化构架式可展开天线机构
2020-04-15 09:27:06郭金伟黄志荣许允斗郭路瑶姚建涛赵永生
航空学报 2020年3期
郭金伟,黄志荣,许允斗, 3,郭路瑶,姚建涛, 3,赵永生, 3,*
1. 燕山大学 河北省并联机器人与机电系统实验室,秦皇岛 066004 2. 中国空间技术研究院 西安分院,西安 710100 3. 燕山大学 先进锻压成形技术与科学教育部重点实验室,秦皇岛 066004
可展开结构为一些能够从折叠构型转换为预定的展开形式,并且能够承受一定载荷的稳定结构[1-2]。大型可展开机构由于其在存储空间的优异性能,被广泛应用于航天任务中,如可展开桅杆、天线和太阳能电池板等[3]。其中,构架展开式天线[4]以其结构几何单元一致性、重复性、高刚度、灵活的几何设计特点和较高的表面精度,在航空航天领域得到了成功的应用,并占有重要的地位。近年来,随着航天事业的高速发展,对执行航天任务的大型可展机构需求更加迫切,并提出了越来越高的要求,获得高精度、高可靠性、大折叠比的新型可展机构,是当今国际上的一个研究热点[5]。
构架式可展机构由大量的可展开基本单元通过一定的连接方式组合而成,针对可展单元,国内外学者提出并研究了多种新构型,部分已成功应用于大型可展天线。高慧芳等[6]提出一种新型对称可展耦合机构,该机构基于正十二面体机构的对称性,且仅有一个移动自由度。Xu和Guan[7]研究一种基于四面体可展单元的构架式天线,提出构-电综合设计方法对该类型天线的性能进行分析。Sattar和Wei[8]对一种口径达13 m的六边形模块化构架式天线进行运动学分析,通过闭合环路方程和坐标变换矩阵,建立各杆件转角和节点位置、速度的关系等式,获得天线的运动轨迹。文献[9-11]分别提出了一种单自由度四棱锥平板式可展单元和一种新型的三棱柱可展机构。李端玲等[12]研究了一种基于剪叉机构的球面可展结构及其运动特性。文献[13]分析了一种全转动副四面体可展单元,针对该机构的多环耦合特性,提出了一种自由度分析新方法。文献[14-17]系统地研究了具有少自由度、大折叠比的模块化可展天线的构型综合、结构优化及运动特性等。基于现有文献提出的可展单元大部分为单自由度机构,其中部分机构并不能实现理想的完全收拢状态,文献[18-20]分别提出一种单自由度3R-3URU四面体可展单元机构、多自由度3RR-3URU组合单元机构,应用在构架式可展天线上,能够实现完全收拢,但只能形成对称球面可展天线机构。而文献[21]提出的3UU-3URU基本单元及其组合单元既能实现完全收拢,也能组网形成任意口径、任意曲率的可展天线机构,但其自由度与运动副数目太多,可靠性低。
现有文献提出了多种新构型应用于不同类型的可展天线,丰富了中国航天领域中可展结构的多样性,目前得到在轨应用的构架式可展天线机构大部分是基于四面体单元,但仍存在机构复杂、自由度数目太多等问题,目前罕见能够实现较少自由度、大收拢率的理想化构架式可展天线结构。因此,本文针对四面体构架式可展天线机构,提出两种基于四面体单元机构构造的新型模块化可展天线机构,并与现有四面体构架式天线机构进行对比分析,主要包括自由度和收拢特性对比分析。旨在丰富四面体构架式可展天线构型设计,为实现较少自由度、大收拢率的构架式可展天线的在轨应用提供理论基础与前期技术支撑。
1 一类模块化构架式可展天线机构
模块化结构设计可重复性高、可拓展性强,通过设计模块大小和数量形成任意尺寸的大型可展结构,且在一定程度上可降低整体结构的复杂性,减少自由度数目。这里基于3RR-3RRR四面体组合单元[13]和3RR-3URU四面体对称组合单元[18-19],提出两种模块化机构。
1.1 基于3RR-3RRR四面体组合单元的模块化机构
基于3RR-3RRR四面体可展单元的组合单元如图1所示,该机构由3个3RR-3RRR四面体单元1、2和3组成。根据文献[13],该机构仅有一个移动收拢自由度。基于3RR-3RRR四面体单元的组合单元构成的模块化机构如图2所示,该机构由3个图1所示组合单元分别通3个虎克铰连接周边花盘形成闭环三角形构成,该闭环三角形为平面三角形,是由3个虎克铰中心连线构成。虎克铰(一个虎克铰等效为两条轴线相交的转动副轴线)轴线方向为:虎克铰U1连接组合单元①和③,虎克铰U2连接组合单元①和②,虎克铰U3连接组合单元②和③。其中,虎克铰U1的一条轴线U11平行于花盘B、C之间连杆轴线方向,另一条轴线U12平行于花盘A、F之间连杆轴线方向;虎克铰U2的一条轴线U21与U11共线,另一条轴线U22平行于花盘D、E之间连杆轴线方向;虎克铰U3的一条轴线U31与U22共线,另一条轴线U32与U12共线。为了增加机构的稳定性,添加3条边界URU约束支链使反射面形成闭环,以约束支链1为例,该约束支链与组合单元①和②形成封闭三角形,构成该支链的两根连杆等长,其中间转动副轴线沿封闭三角形平面且垂直于连杆轴线,两端U副靠近组合单元的两个转动副与中间转动副平行,另两个转动副分别沿两连杆轴线方向。3个组合单元模块形成闭环机构后,组合单元机构内部运动特性不变。
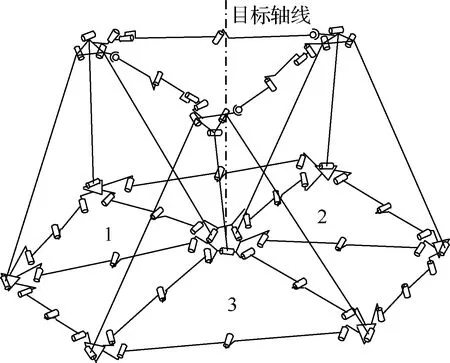
图1 基于3RR-3RRR四面体的组合单元机构Fig.1 Combination unit based on 3RR-3RRR tetrahedron
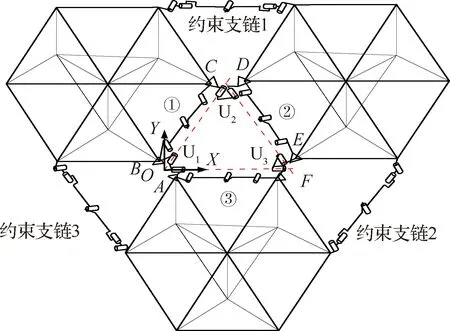
图2 基于3RR-3RRR四面体组合单元的模块化 机构Fig.2 Modular mechanism based on 3RR-3RRR tetrahedral combination unit
1.2 基于3RR-3URU四面体组合单元的模块化机构
基于3RR-3URUR四面体可展单元的组合单元如图3所示,该机构由3个3RR-3URU四面体单元1、2和3组成。根据文献[19],基于3RR-3URU四面体单元的对称组合单元具有7个自由度,反射面花盘除具有向机架花盘A的移动收拢自由度,还具有调姿自由度。由于该机构只有满足对称条件下才能实现收拢和调姿,实现完全收拢,因此,只能组成大型球面天线机构,当组成抛物面天线机构时存在一定局限性。基于3RR-3URUR四面体单元的对称组合单元构成的模块化机构如图4所示,该模块化结构由3个图4所示的组合单元亦是分别通3个虎克铰连接周边花盘形成闭环三角形构成,不同的是虎克铰轴线方向。如图所示,其中,虎克铰U1的一条轴线U11垂直于三角形平面,另一条轴线U12平行于花盘B、C之间连杆轴线方向;虎克铰U2的一条轴线U21垂直于三角形平面,另一条轴线U22平行于花盘D、E之间连杆轴线方向;虎克铰U3的一条轴线U31垂直于三角形平面,另一条轴线U32平行于花盘F、A之间连杆轴线方向。为了增加机构的稳定性,添加三条边界URU约束支链使反射面形成闭环,该约束支链中运动副轴线布置与图2中3条约束支链运动副轴线布置一致。3个组合单元模块形成闭环机构后,组合单元机构内部运动特性不变。
图3 基于3RR-3URU四面体的对称组合单元机构Fig.3 Symmetrical combination unit based on 3RR-3URU tetrahedron
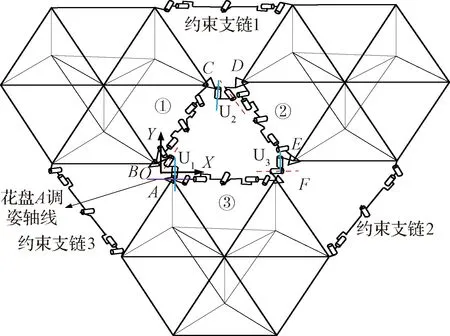
图4 基于3RR-3URU四面体对称组合单元的 模块化机构Fig.4 Modular mechanism based on 3RR-3URU tetrahedral symmetrical combination unit
2 模块化可展天线机构自由度分析
2.1 基于3RR-3RRR四面体组合单元的模块化机构自由度分析
基于3RR-3RRR四面体组合单元的模块化机构为空间多闭环机构。首先,拆除三条边界URU支链,由于3RR-3RRR四面体组合单元具有一个确定的自由度,所有花盘之间仅实现姿态不变的相对移动,仅考虑中间三角形机构,花盘B和C之间的运动为相对移动,则两者之间可等效为一个移动副,同理,A、F,D、E之间同样可等效为移动副连接。如图5所示。显然,与所有转动副轴线均垂直的约束力偶为该机构的公共约束,根据G-K公式,该三角形机构的自由度数目为
5×(6-6-1)+9=4
(1)
式中:M为机构的自由度数;d为机构的阶数,且d=6-λ,λ为机构的公共约束数;n为包含机架在内的构件数;g为机构所含运动副个数;fi为第i个运动副具有的单自由度数;v为冗余约束数;ξ为局部自由度数。
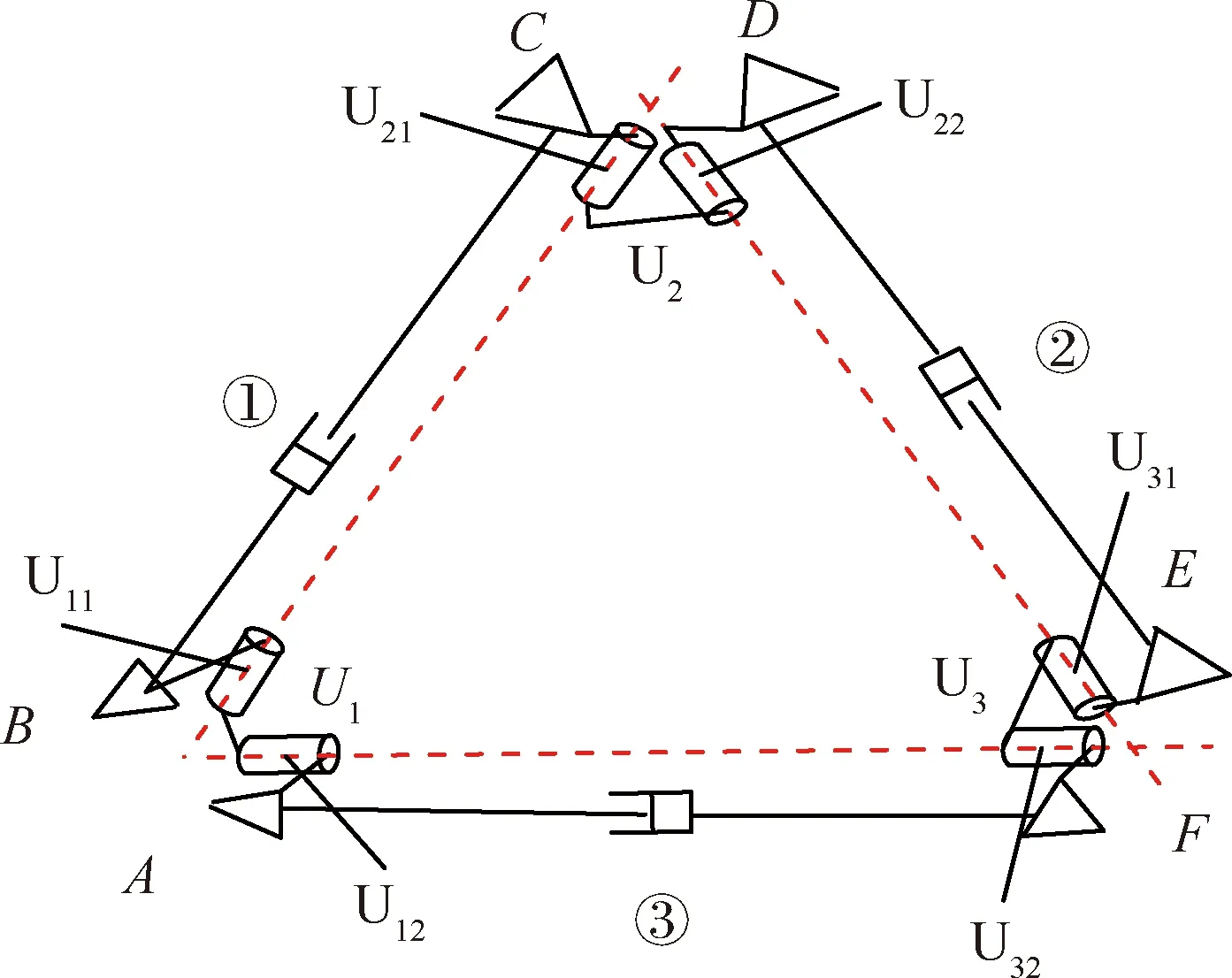
图5 中间三角形机构的等效机构Fig.5 Equivalent mechanism of intermediate triangular mechanism

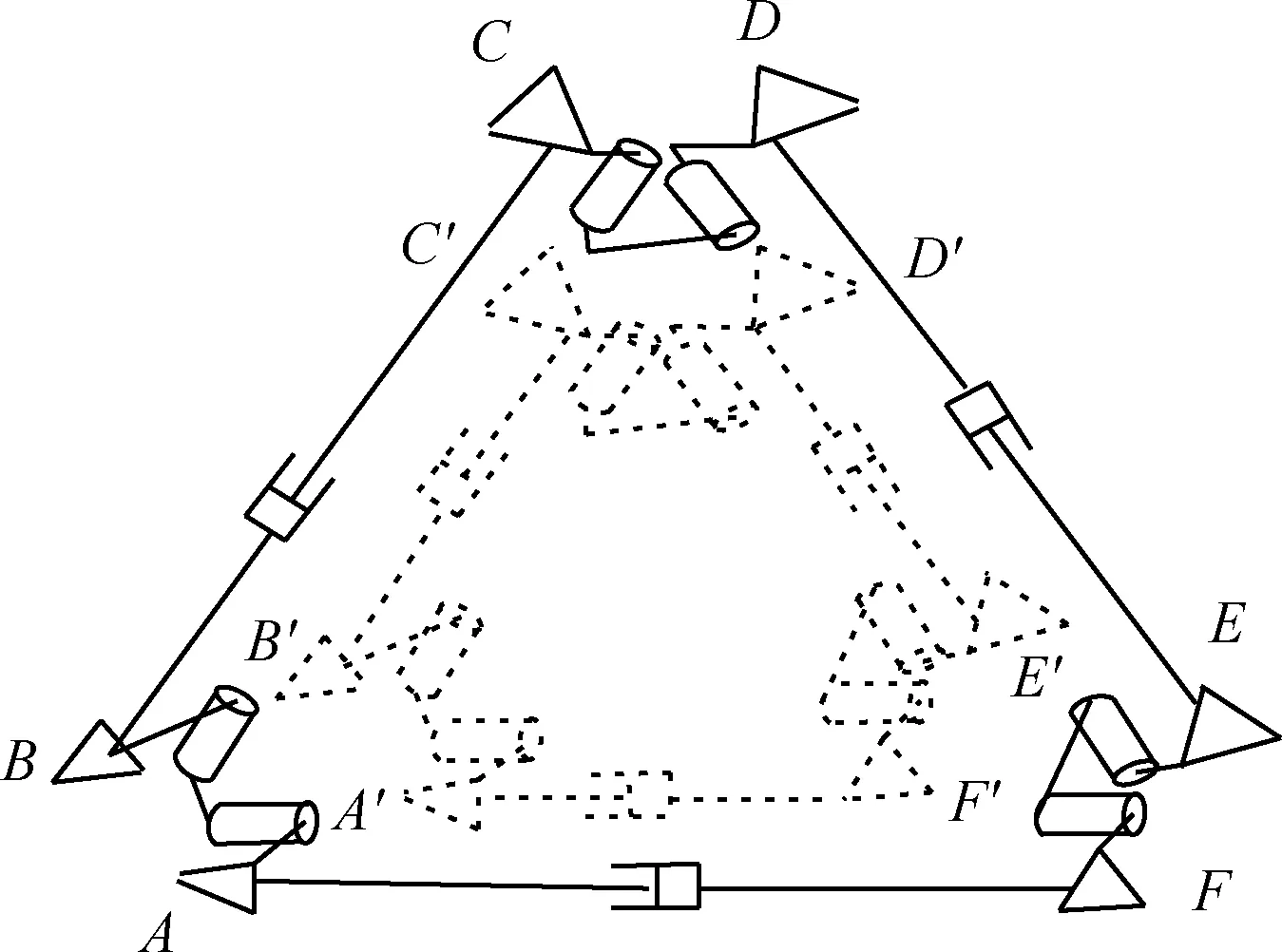
图6 中间三角形机构的同步收拢运动示意图Fig.6 Synchronous folding motion schematic of intermediate triangular mechanism
3个组合单元模块形成闭环机构后,组合单元机构内部运动特性不变。复原三条边界URU支链,仅考虑移动收拢运动,图2所示机构可等效为图7所示机构。图7中,Uab1和Uab2分别表示连接结点b处虎克铰的两条转动轴线,Uab3和Uab4分别表示连接结点a处虎克铰的两条转动轴线,其下标ab表示该支链两端连接的节点。

图7 图2 所示机构的等效机构Fig.7 Equivalent mechanism of the mechanism shown in Fig.2
根据螺旋理论[22],每条URU支链提供一个平行于中间转动副轴线的约束力,只限制了支链两端连接花盘在该方向的相对移动,如图8所示,当在fF之间的移动副上添加驱动,使f移动到f′,根据机构的约束关系,a将移动到a′,在ab之间URU支链的约束作用下,a和b的移动运动同步相关,因此,b将移动到b′,同理,其他位置节点也可确定。因此,3条URU支链中,只有两条支链的约束作用使得周边花盘节点的移动运动同步,而另外一条(如ef支链)提供的约束为虚约束,不起作用。在3个组合单元模块中,各支链的移动收拢运动为同步运动,因此,在单驱动作用下,闭环ABCDEF和闭环abcdef也将同步向三角形中心移动收拢。

图8 图7所示机构的同步收拢运动示意图Fig.8 Synchronous folding motion schematic of the mechanism shown in Fig.7
考虑到组合单元模块的调姿运动,当拆除三条边界URU支链时,3个组合单元模块能够分别绕U副轴线转动,而当添加三条边界URU支链时,组合单元模块的3个绕各自轴线自由转动的运动变得相关。根据单闭环约束条件,在闭环ABba中,各运动螺旋满足:
(2)

已知主动关节速度ωU11和vP1,则式(2)化简为
(3)
将式(3)变形为
Jω=-Q
(4)
式中:


综上所述,3条边界URU支链引入2个约束,基于3RR-3RRR四面体单元的组合单元构成的模块化机构具有的自由度数目为4-2=2。其性质为同步移动运动和组合单元模块的同步调姿运动。
2.2 基于3RR-3URU四面体对称组合单元的模块化机构自由度分析
根据上述对基于3RR-3RRR四面体单元的组合单元构成的模块化机构自由度分析方法,拆除3条边界URU支链后,3个组合单元分别通过虎克铰连接,每个组合单元本身仍具有7个自由度,运动特性不变。仅考虑中间的三角形机构,如图9所示,在该三角形机构中,以花盘A为例,根据组合单元本身的自由性质,花盘A能够绕与其所连腹杆的转动副轴线转动实现调姿(该转动副轴线垂直于腹杆轴线且与花盘A所在四面体单元底部三角形外接圆相切),为了保证该运动的存在,根据反螺旋理论,连接花盘AB的支链U1所提供的约束螺旋只能是垂直于该转动轴线的约束力偶或与该转动轴线共面的约束力。经计算,花盘之间所连虎克铰提供的约束螺旋系为两个被连接花盘的约束螺旋系,仅考虑花盘的调姿运动时,3个虎克铰仅仅发挥了连接3个组合单元的作用,并不会影响花盘的调姿运动,这也是模块化设计的初衷。
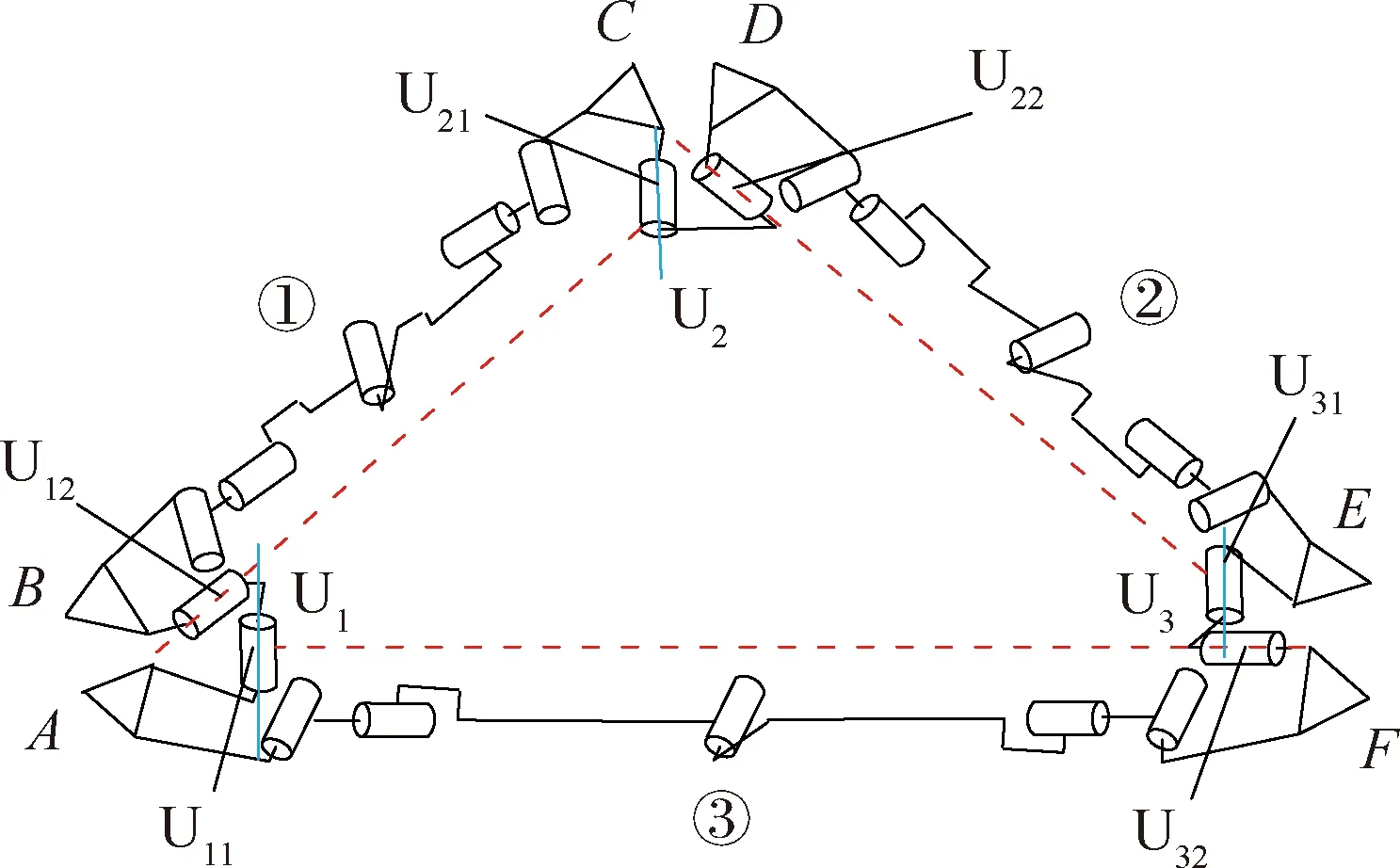
图9 中间三角形机构Fig.9 Intermediate triangular mechanism
复原三条边界URU支链,每条URU支链提供一个沿URU支链中3个转动副轴线方向的约束力,仅限制了支链两端连接花盘在该方向的移动,不影响花盘的转动调姿,因此,由3个基于3RR-3URU四面体单元的对称组合单元构成的模块化结构具有的自由度数目为7×3-3=18。该结构能够实现同步移动收拢和花盘的调姿运动,最终实现完全收拢。
2.3 基于两种组合单元的模块化机构仿真分析
基于Adams动力学仿真软件对基于2种不同组合单元的模块化天线机构进行仿真分析。机构在完全展开状态,同步杆均处于完全伸直状态,为边界奇异位形,因此,仿真分析之前需要对模型进行避奇异处理,在每条同步杆的中间铰链处添加相同的驱动,使同步铰链产生微小转动,避开奇异位形。根据机构的自由度数目为使机构具有确定运动所需的驱动数。根据上述自由度分析,分别对两种模块化结构添加驱动,驱动数至少等于自由度数目。基于3RR-3RRR四面体组合单元的模块化天线收拢过程如图10所示。
图10(b)中,选择组合单元的一个同步铰链添加收拢驱动,添加驱动局部放大图如图10(c)所示,其值为1 d*time;选择连接组合单元的虎克铰的一条轴线添加调姿驱动,添加驱动局部放大图如图10(d)所示,其值为0.08 d*time。其中d*time为驱动速度单位,表示每秒转动的角度值。通过IF函数设置驱动使机构实现先收拢后调姿。由于基于3RR-3RRR四面体组合单元的模块化天线具有一个同步收拢运动和一个同步模块调姿运动,因此,在任意一条同步杆的同步铰链添加转动驱动,在任意一条虎克铰轴线添加转动驱动均可以使机构实现图10所示的收拢过程。
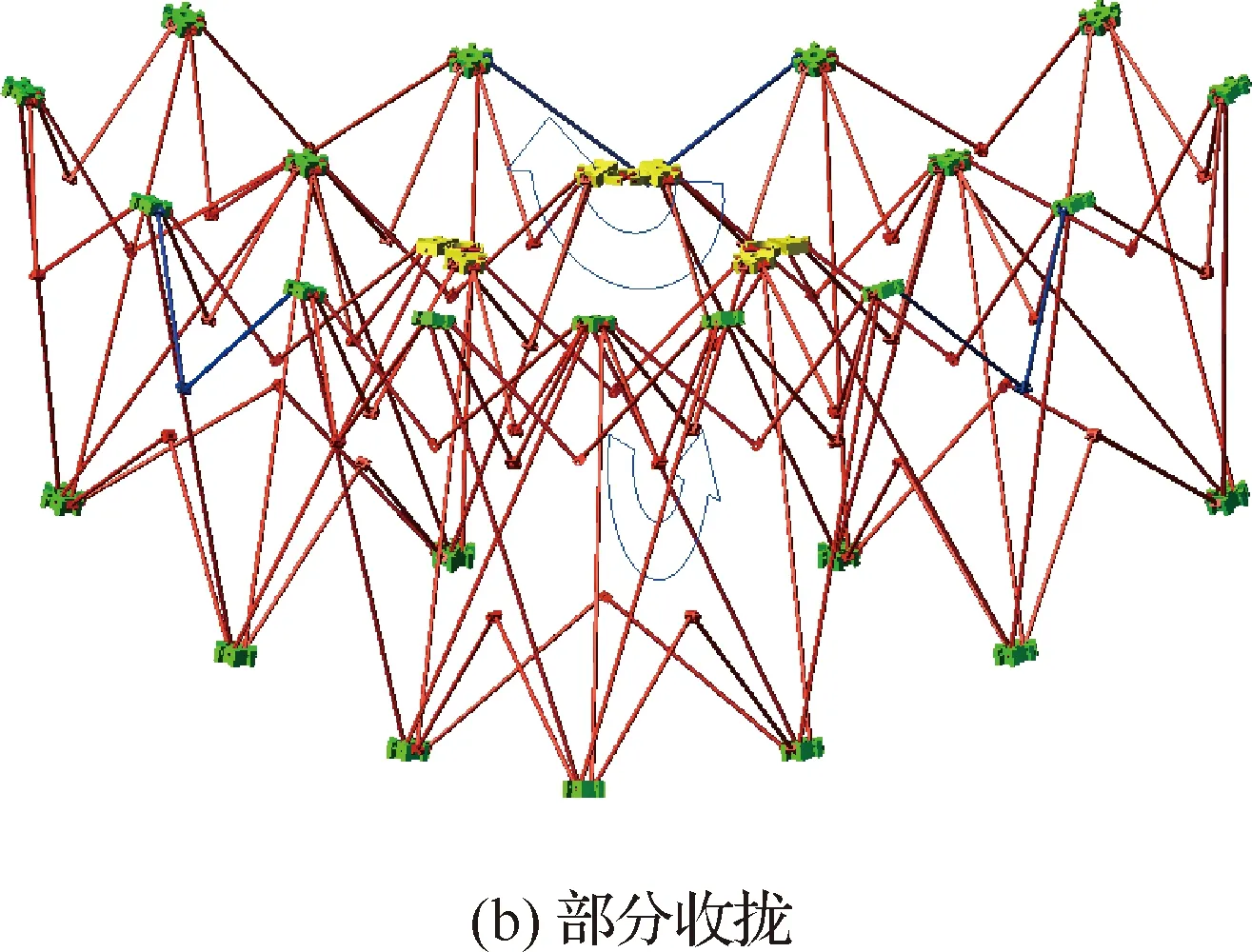
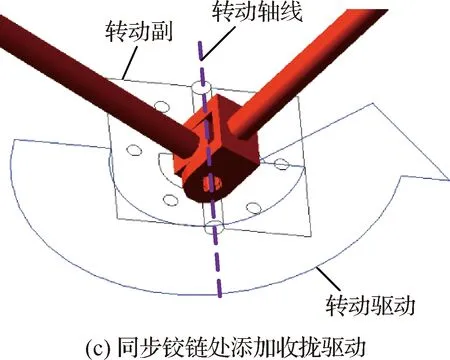

图10 基于3RR-3RRR四面体组合单元的模块化天线 机构收拢过程Fig.10 Folding process of modular mechanism based on 3RR-3RRR tetrahedral combination unit
测量中间三角形机构的3条同步支链中间转动副转角在收拢过程中的变化情况如图11所示,3个虎克铰的6条转动轴线转角变化如图12所示。
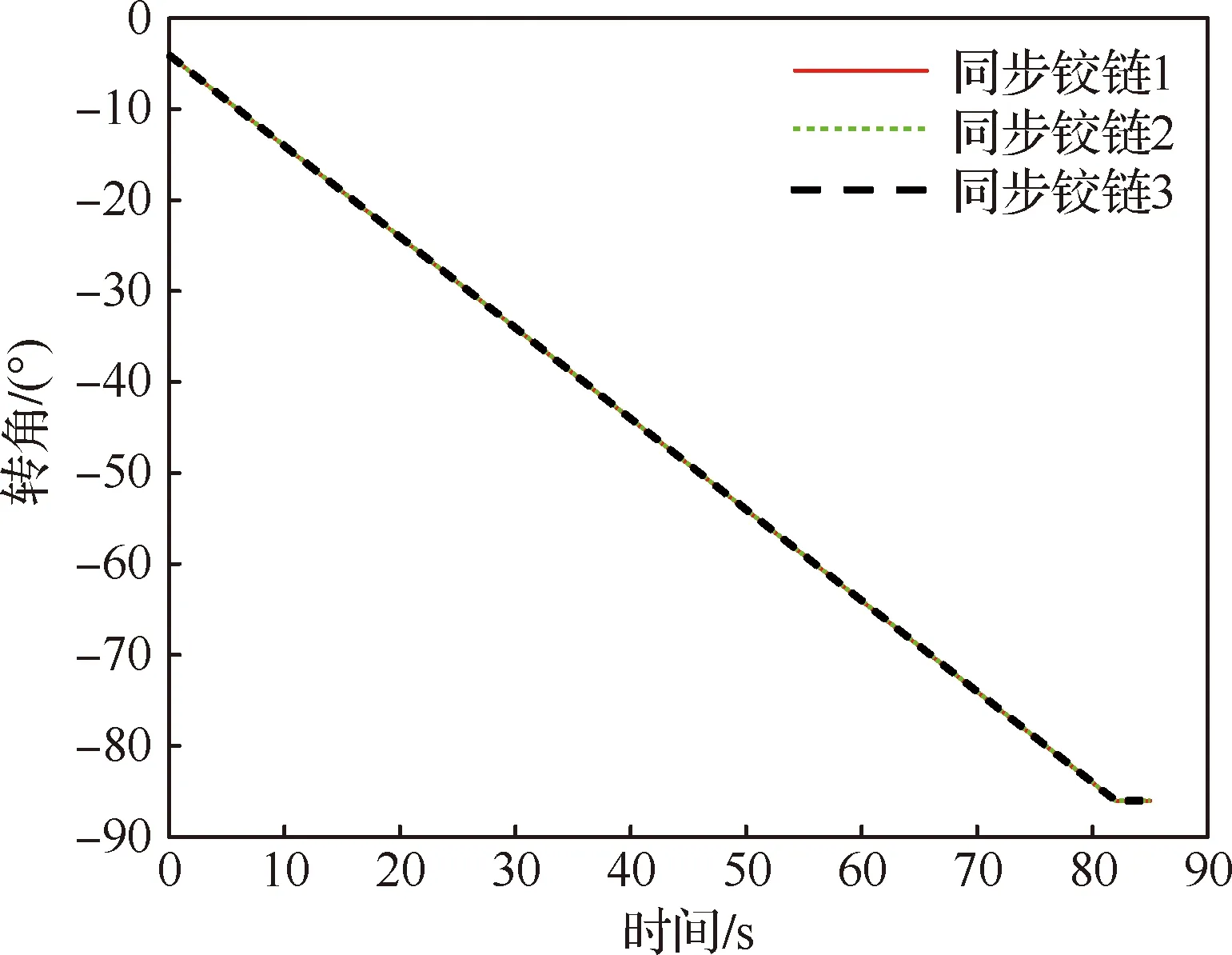
图11 中间三角形机构的同步铰链转角Fig.11 Synchronous hinge angless of intermediate triangular mechanism
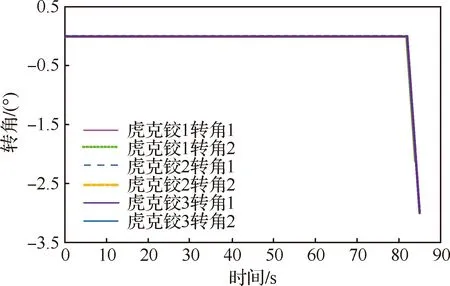
图12 虎克铰转角Fig.12 Hooker hinge angles
根据图11和图12,0~82 s为收拢阶段,且为同步收拢,82~85 s为模块调姿阶段,且为同步调姿。验证了理论分析正确性。由于基于3RR-3RRR四面体组合单元本身只能实现移动收拢运动,不能实现调姿运动,因此,收拢后的机构背面花盘比较分散,其组成的模块化机构亦不能实现完全收拢。
基于3RR-3URU四面体对称组合单元的模块化天线收拢过程如图13所示。图中,根据理论分析中自由度数目和性质,在机构中共添加了18个驱动,驱动添加位置如图13(b)所示,每个组合单元驱动数目为6,收拢驱动添加在背面花盘和腹杆相连的转动副,驱动添加局部放大图如图13(c)所示;调姿驱动添加在反射面花盘和腹杆相连的转动副,驱动添加局部放大图如图13(d)所示。收拢驱动和调姿驱动值均为1 d*time。通过IF函数设置驱动使机构实现先收拢到位,再花盘调姿,直至完全收拢。
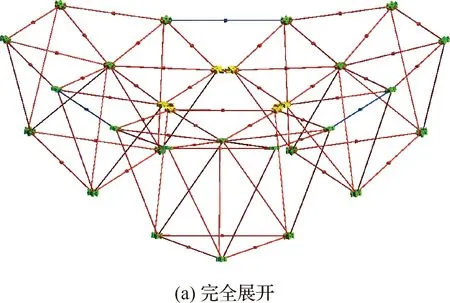
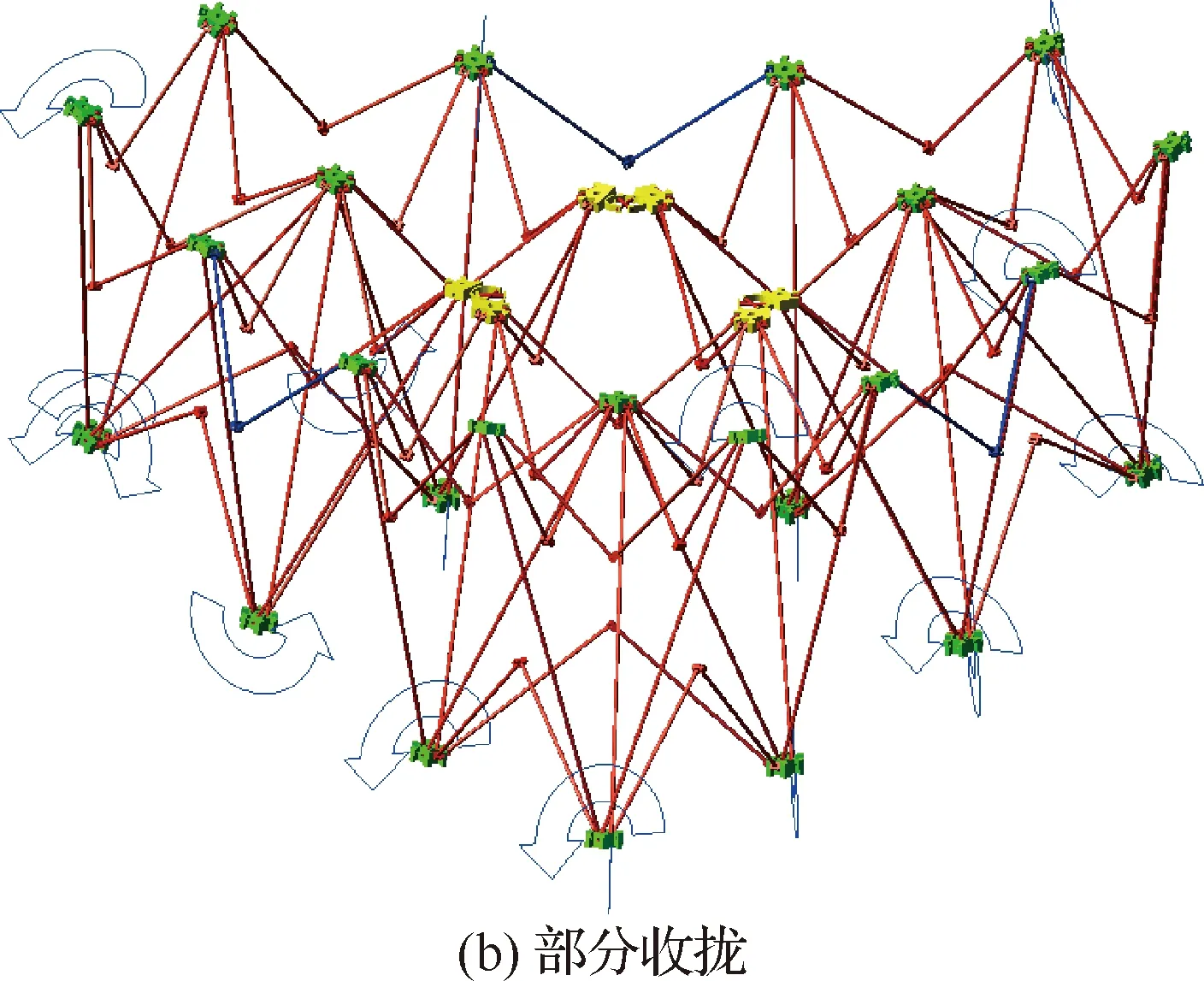
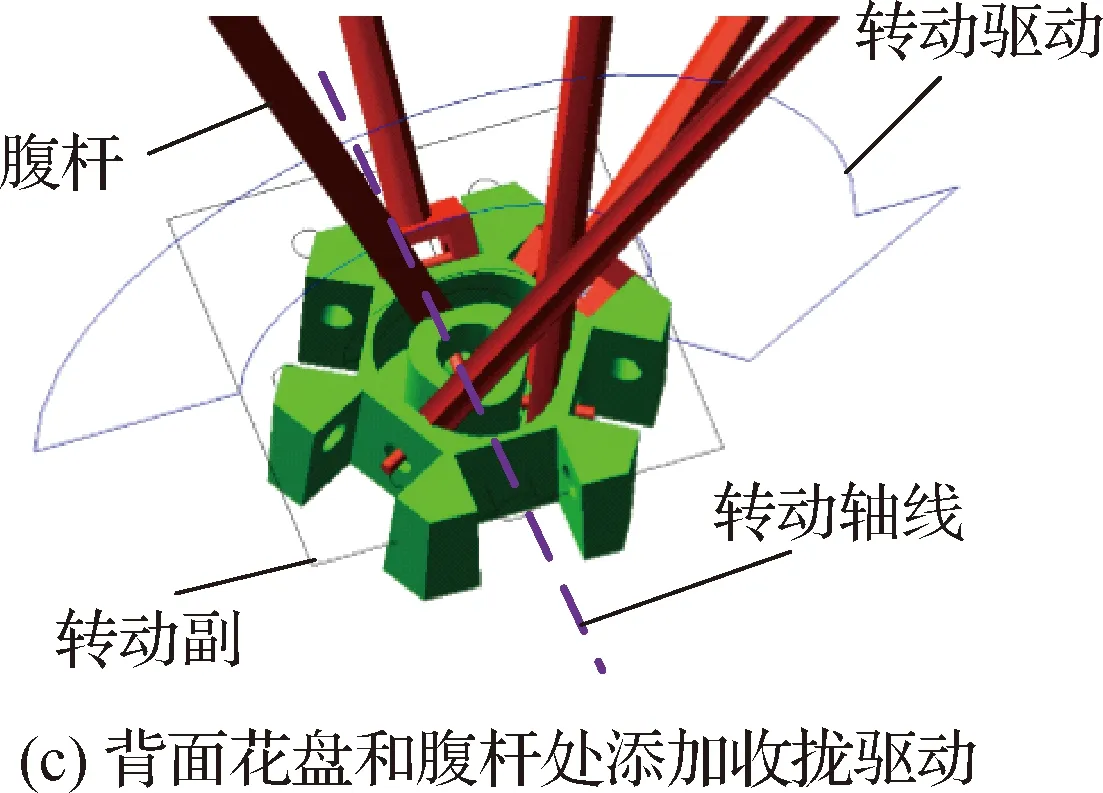
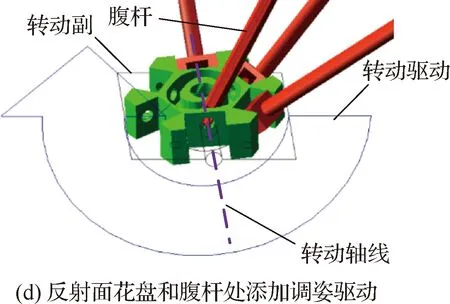
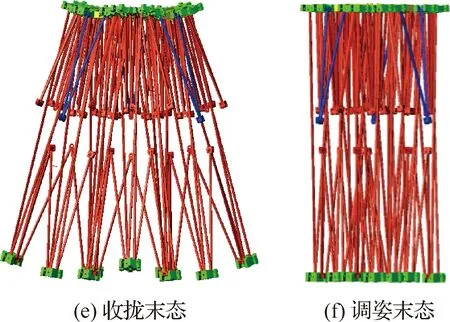
图13 基于3RR-3URU四面体组合单元的模块化天线 机构收拢过程Fig.13 Folding process of modular mechanism based on 3RR-3URU tetrahedral combination unit
测量中间三角形机构的3条同步支链两端所连花盘的相对位移在收拢过程中的变化如图14所示,以一个周边花盘为例,选取ZYX欧拉角描述该花盘的姿态变化,如图15所示。
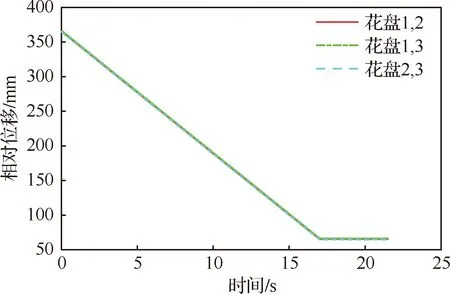
图14 中间三角形机构中花盘间相对位移Fig.14 Relative displacement between nodes in intermediate triangular mechanism
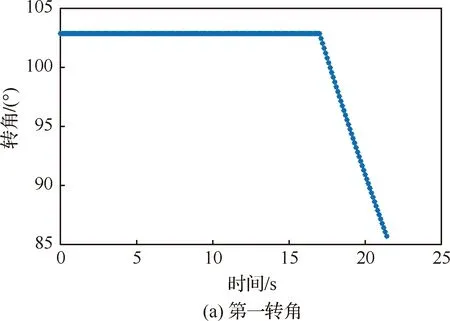
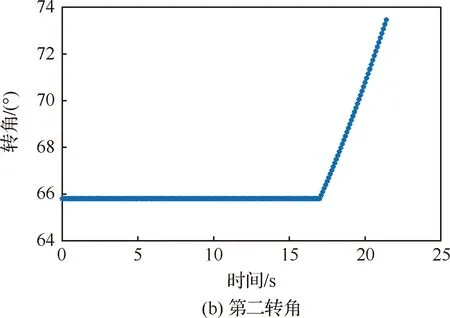

图15 周边花盘姿态变化Fig.15 Orientation change of peripheral node
根据图14和图15,0~17 s为收拢阶段,且为同步收拢,花盘姿态不变,17~21.5 s为反射面花盘调姿阶段,直至所有花盘平面均处于同一(水)平面,机构实现完全收拢。验证了理论分析正确性。
3 四面体构架式可展天线机构收拢特性
基于四面体类构架式可展天线机构,除自由度数目及性质不同,收拢率大小也是其性能评价的重要分析指标之一。本节将分别计算基于四面体的模块机构和非模块化机构的收拢率。
3.1 基于四面体组合单元的模块化机构
由3个基于3RR-3RRR四面体单元的组合单元构成的模块化机构和由3个基于3RR-3URU四面体单元的对称组合单元构成的模块化机构在完全展开状态时的三维模型如图16所示,该两种机构在收拢末态时的三维模型分别如图17和图18所示。每个组合单元模块,上表面花盘中心均处于同一抛物面上,且花盘平面分别平行于中心的与抛物面交点的切平面,该模块化结构为通过小型抛物面和三角形平面组网形成较大型及大型构架式曲面可展天线反射面,通过改变组合单元反射面花盘中心所在平面与三角形平面之间的夹角及组合单元模块的数量,形成不同曲率、不同口径的构架式曲面可展机构。
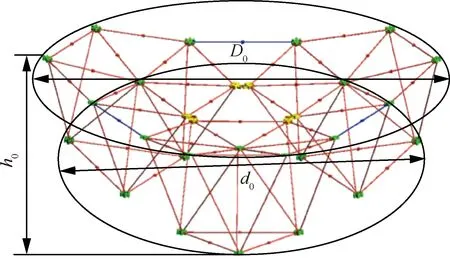
图16 基于2种不同组合单元的模块化机构在完全 展开状态三维模型图Fig.16 Three-dimensional model of modular mechanism in fully deployed state based on two different combination units
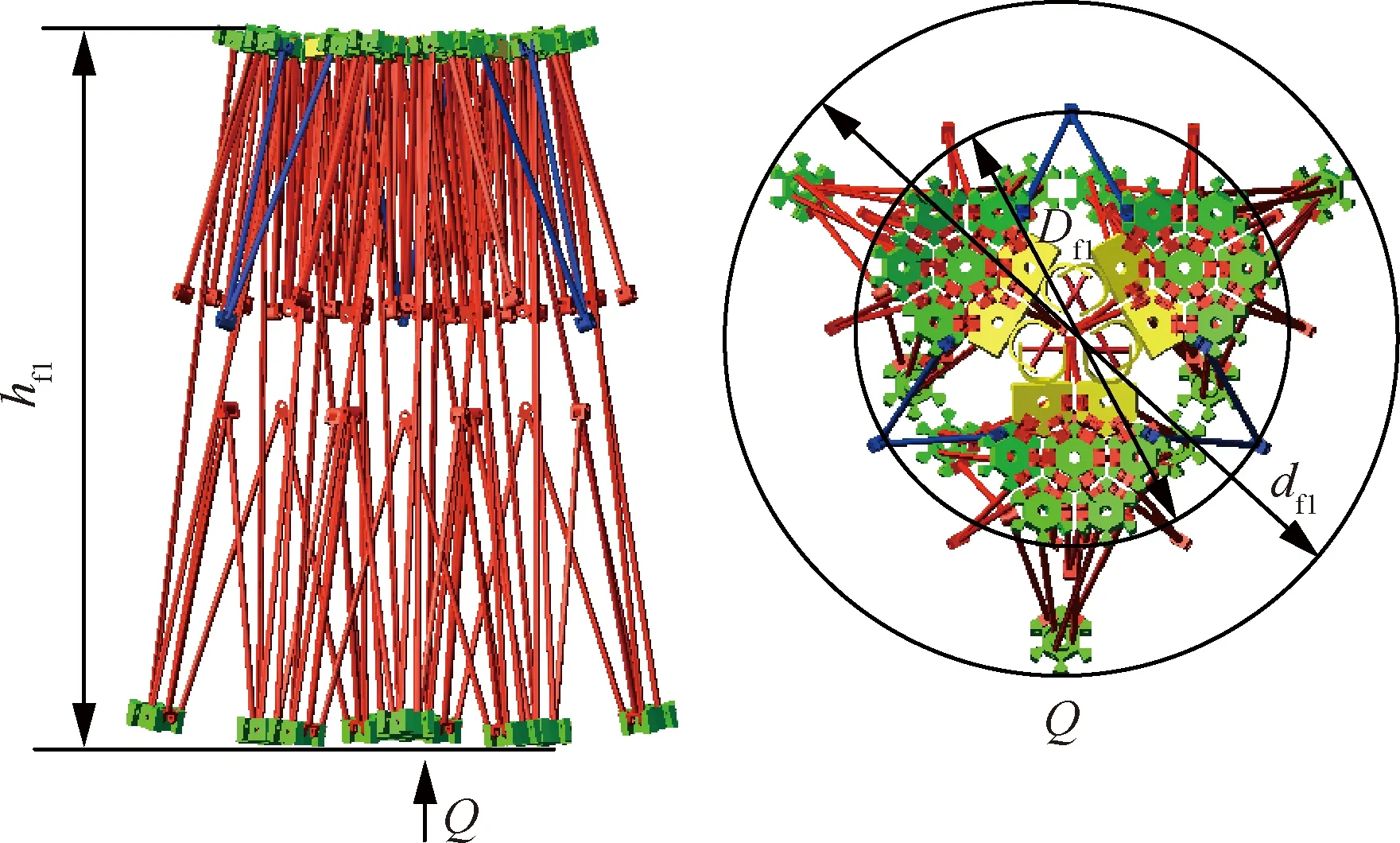
图17 基于3RR-3RRR四面体组合单元的模块化 机构收拢末态Fig.17 Folded state of modular mechanism based on 3RR-3RRR tetrahedral combination unit
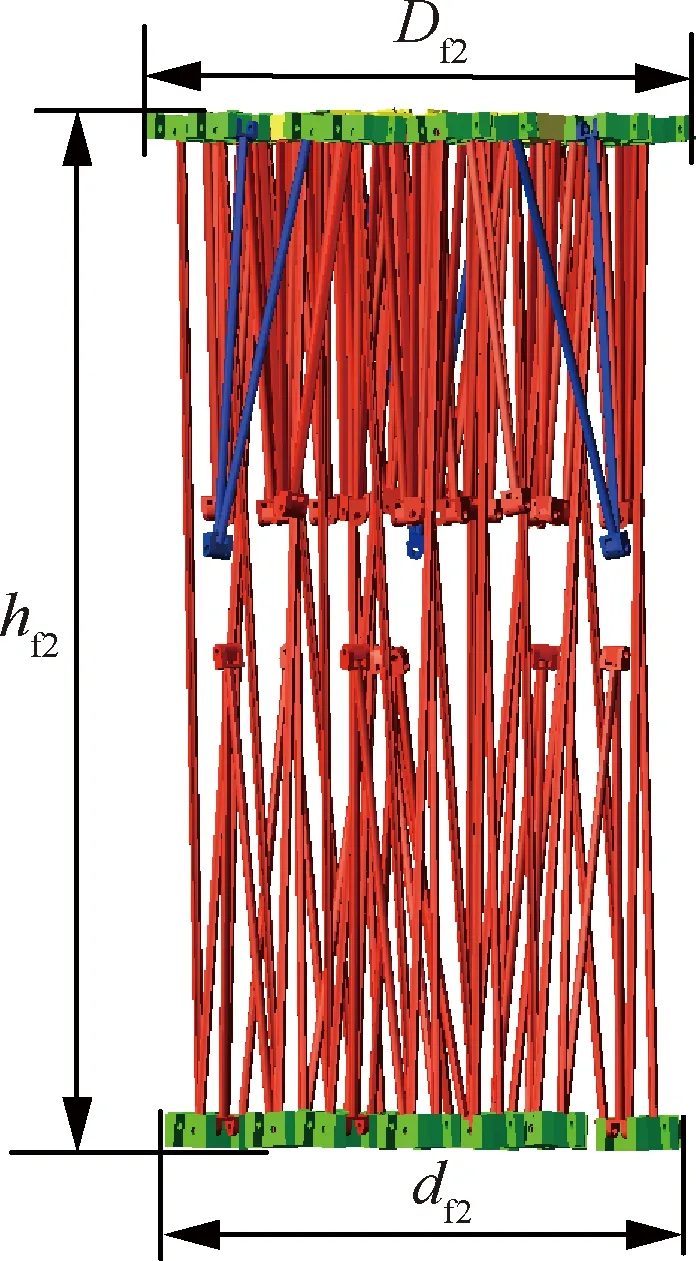
图18 基于3RR-3URU四面体对称组合单元的模块化 机构完全收拢末态Fig.18 Folded state of modular mechanism based on 3RR-3URU tetrahedral symmetrical combination unit
基于两种组合单元的模块化机构分别具有两种极限位型:完全展开位型和完全收拢位型,这两种位型为机构的两种边界奇异位形。在两种状态下,利用机构所占空间体积最大和最小,二者比值为机构的收拢率。经计算,由3个基于3RR-3RRR四面体单元的组合单元构成的模块化结构,其收拢率λ1为
(5)
式中:V0和V1分别为机构完全展开和收拢时所占空间的体积;D0、d0和h0分别为机构完全展开时反射面花盘的包络圆直径、背面花盘的包络圆直径、反射面和背面之间的最大距离,D0=2.174 m,d0=2.168 9 m,h0=0.665 m;Df1、df1和hf1分别为机构收拢时反射面花盘的包络圆直径、背面花盘的包络圆直径、反射面和背面之间的最大距离,Df1=0.357 4 m,df1=0.56 m,hf1=0.631 m。
由3个基于3RR-3URU四面体单元的对称组合单元构成的模块化机构,其收拢率λ2为
(6)
式中:V2为机构完全收拢时所占空间的体积;Df2、df2和hf2分别为机构收拢时反射面花盘的包络圆直径、背面花盘的包络圆直径、反射面和背面之间的最大距离,Df2=0.354 m,df2=0.362 m,hf2=0.62 m。
3.2 基于3RR-3RRR四面体单元的非模块化机构
基于3RR-3RRR四面体单元的非模块化机构在完全展开和收拢状态时如图19和图20所示。为了与模块化机构进行对比,该非模块化机构在完全展开时,机构所占空间体积与模块化机构在完全展开状态一致,计算该非模块化机构的收拢率λ3为
(7)
式中:V3为机构完全收拢时所占空间的体积;Df3、df3和hf3分别为机构收拢时反射面花盘的包络圆直径、背面花盘的包络圆直径、反射面和背面之间的最大距离,Df3=0.258 m,df3=0.708 m,hf3=0.657 m。
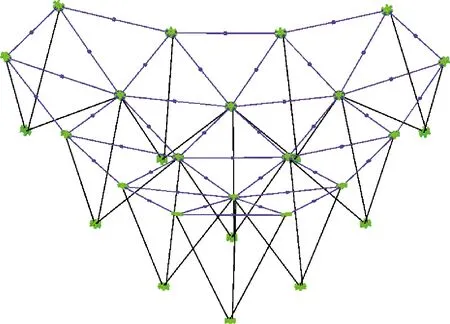
图19 基于3RR-3RRR四面体单元的非模块化 机构在完全展开状态三维模型图Fig.19 Three-dimensional model of non-modular mechanism based on 3RR-3RRR tetrahedral unit in fully deployed state
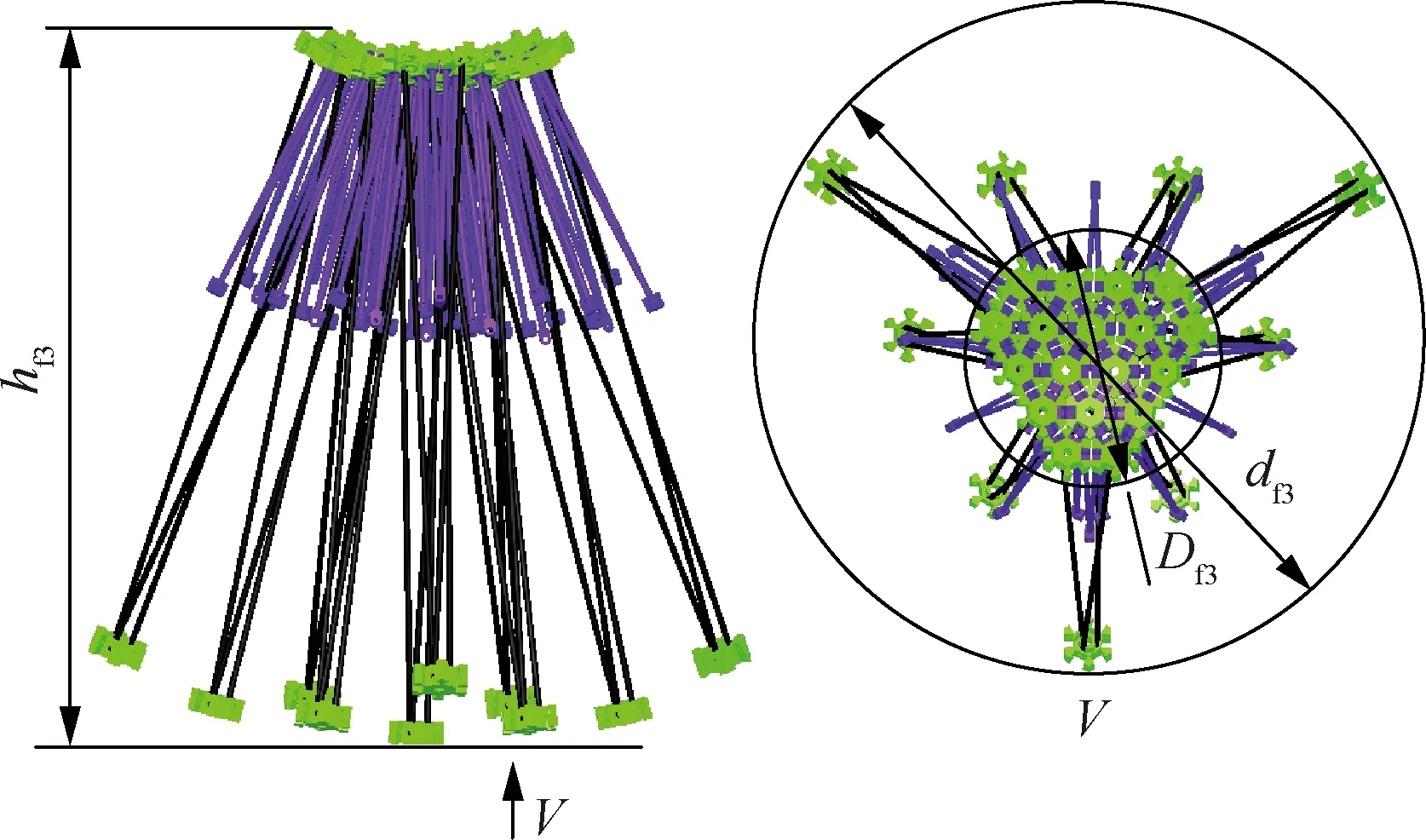
图20 基于3RR-3RRR四面体单元的非模块 化机构收拢末态Fig.20 Folded state of non-modular mechanism based on 3RR-3RRR tetrahedral unit
4 四面体构架式模块化与非模块化可展天线机构对比分析
在本文情景下,现有四面体构架式可展天线机构大多为非模块化设计,之所以称之为非模块化设计,是由于大型机构均为由多个不同的四面体单元通过一定连接方式(共用连杆和花盘等)构成,且单个四面体单元不能表征大型机构。而本文提出的一类模块化机构由多个具有相同特点的组合单元模块构成,每个单独的模块单元均能表征其构成的大型模块化机构的特征。
现有四面体构架式可展天线机构主要为基于四面体3RR-3RRR[13]、3RR-3URU[18-19]和3UU-3URU[21]的非模块机构设计[23],由于文献[18-19]提出的基于3RR-3URU的非模块化机构只能为球面可展天线,不能形成任意曲面天线,在此不作分析比较。本文提出的两种模块化机构与现有非模块化机构相比,其自由度与收拢率如表1所示。
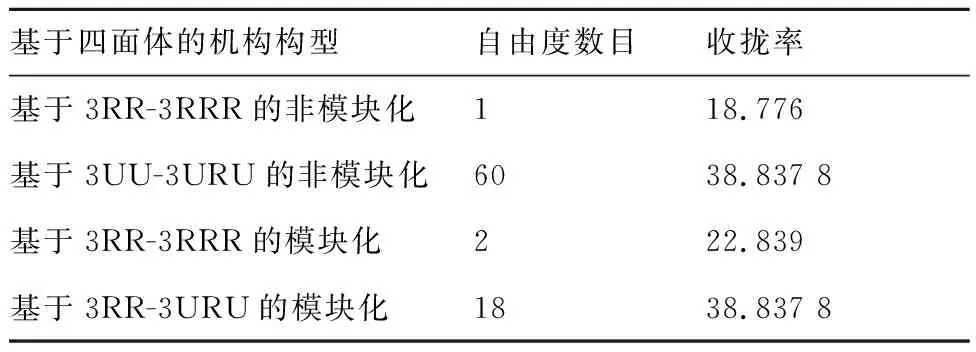
表1 模块化与非模块化机构的自由度与收拢率
需要说明的是,表1中均为天线机构完全展开时其口径为2.174 m时所得数据,当天线口径改变,其组成单元数量改变时,其自由度数目及收拢率也相应改变,但四者之间的对比关系始终满足一定规律,即:基于3RR-3RRR的模块化与非模块化相比,前者自由度数目增加,收拢率提高;在收拢率为38.837 8时,机构为完全收拢,此时,基于3RR-3URU的模块化与基于3UU-3URU非模块化相比,二者收拢率一致,前者自由度数目明显减少,且基于3RR-3URU的组合单元满足对称特点,与基于3UU-3URU的组合单元相比,杆件类型减少,易于加工制造;基于3RR-3URU的模块化与基于3RR-3RRR模块化相比,前者自由度数目增加,但收拢率明显提高。总之,基于3RR-3URU的模块化机构在满足大收拢率的情况下,自由度明显减少,杆件类型减少。
为了模块化机构的后续研究,首先加工基于3RR-3URU四面体对称组合单元样机一台,如图21所示,该样机为模块化结构的组成模块之一,能够实现完全收拢和完全展开状态。
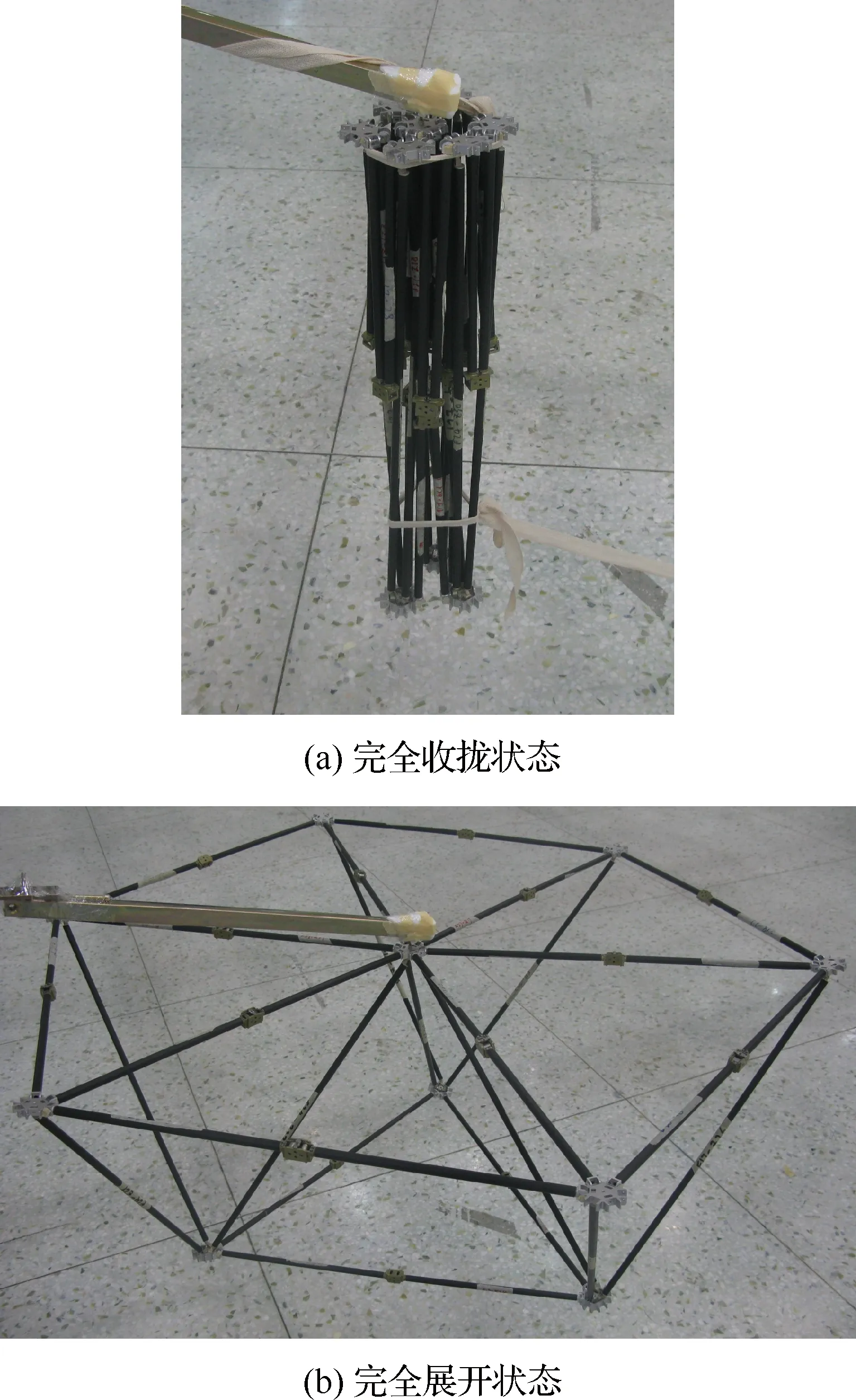
图21 模块单元Fig.21 Module unit
5 结 论
1) 基于3RR-3RRR四面体组合单元和3RR-3URU四面体对称组合单元,提出了两种新型模块化可展天线支撑机构。
2) 应用拆杆-等效-复原思想、螺旋理论及G-K公式分别分析了两种新型模块化机构的自由度数目和性质。由3个基于3RR-3RRR四面体组合单元构成的模块化结构自由度为2,能够实现同步收拢运动和组合单元模块的同步调姿运动;由3个基于3RR-3URU四面体对称组合单元构成的模块化机构自由度为18,能够实现同步收拢运动和花盘独立调姿运动。仿真分析验证了自由度理论分析的正确性。
3) 分别计算得到现有基于四面体的非模块化和所提出的两种模块化机构的收拢率,对比分析非模块化机构和模块化机构的自由度数目和收拢率,得到结论,基于3RR-3URU的模块化机构在满足大收拢率的情况下,自由度明显减少,杆件类型减少,结构复杂度降低,易于加工制造,且多个模块可以实现任意口径、任意曲率的构架式可展天线机构。
猜你喜欢
科普童话·学霸日记(2023年7期)2023-08-21 09:49:46
数学物理学报(2021年4期)2021-08-30 08:27:52
数学物理学报(2021年2期)2021-06-09 08:54:24
机械设计与制造(2020年11期)2020-11-23 14:55:24
作文·小学低年级(2019年10期)2019-09-10 07:22:44
户外探险(2018年1期)2018-01-11 12:51:08
金色少年(美绘小文学)(2017年2期)2017-04-18 07:17:08
好孩子画报(2015年10期)2015-05-30 10:48:04
小学阅读指南·低年级版(2014年2期)2014-05-27 02:38:11
影像科学与光化学(2014年1期)2014-03-11 16:02:43