基于光学运动捕捉的上肢康复机器人可用性测试研究
2020-04-14 11:18:46丁竹王殊轶谷雯雪于德旺陈俊
生物医学工程学进展 2020年1期
丁竹,王殊轶,谷雯雪,于德旺,陈俊
上海理工大学 医疗器械与食品学院(上海, 200093)
0 引言
随着社会的发展和老年化的加剧, 老年人易发的中风、 偏瘫等脑血管疾病的发病率也随之增加, 患者主要表现为肢体运动障碍[1]。利用康复机器人进行康复训练逐渐成为治疗肢体运动障碍的主要方式, 上肢康复机器人的作用是实现患者上肢运动功能重建, 使患者回归日常生活[2-4]。而上肢康复机器人由于设计的不合理往往在临床中出现使用错误, 从而对患者康复效果产生影响, 严重者将危及患者生命[5-6], 所以对上肢康复机器人进行可用性测试是十分必要的工作。
1 研究现状
安全性是医疗器械可用性测试的首要指标, 也是最重要的指标[7], 而上肢康复机器人的有效性主要通过运动学参数来验证。光学式动作捕捉系统通过捕捉粘贴在人体主要关节部位上的被动反光标记小球(Marker)的三维空间位置记录人体在运动捕捉范围内的运动参数。 近年来国内外诸多学者都曾利用光学式运动捕捉系统进行上肢康复的相关研究, 如Pasquale等[8]利用机械手臂系统和有标记光学运动捕捉系统分别对家庭康复训练中患者肩关节和肘关节轨迹跟踪能力进行评价, 验证了系统设计的准确性。但由于实验环境中电子设备对系统的磁干扰无法排除, 所以角度测量结果受到影响。Adso等[9]对用于康复治疗的上肢和下肢关节运动的Kinect运动捕捉数据进行了生物力学验证, 对比研究了Kinect与光学运动捕捉专业系统(VICON)的关节角计算精度, 通过两种系统获得的上半身和下半身关节角度的差异来评估其作为运动捕捉系统的准确性, 结果证明Kinect的精度不及光学运动捕捉系统, 但可以确认Kinect是目前康复治疗中非常有用的技术。Joan等[10]建立了一个神经障碍患者上肢运动的新生物力学模型, 对上肢运动进行运动学、 动力学和能量分析, 该模型的生物力学测量结果为临床医生深入了解神经性疾病患者日常生活活动中上肢运动情况提供了有价值的信息。
本文为上肢康复机器人建立了可用性测试指标模型, 如图1所示。利用光学式运动捕捉系统采集受试者在利用上肢康复机器人进行康复训练时的运动学数据, 客观验证了上肢康复机器人的安全性和有效性, 并采用视觉模拟评分法对受试者进行主观问卷调查, 其结果反映了上肢康复机器人的舒适性问题。
2 实验
2.1 受试者
ANSI/AAMI HE75:2009标准提出, 对于后期总结性可用性测试, 每个不同的用户组只需要15到20名参与者就可以进行[11]。因此本次实验招募15名受试者, 其中8名男性、 7名女性, 年龄(23.4±1.7)岁; 身高(1.7±0.08) m; 体重(60.73±10.15) kg; 体重指数(20.92±1.82) kg/m2。入组标准为无上肢关节和肌肉疾患的正常成年人。排除标准: 1)患有脑卒中、 偏瘫及有上述病史者; 2)患有脑损伤及脑神经功能障碍及有上述病史者; 3)上肢关节、 肌肉疼痛或有骨折、 关节脱位病史者。

图1 上肢康复机器人可用性测试指标模型Fig.1 Usability test index model of upper limb rehabilitation robot
2.2 实验设备
本次实验选择了安阳神方康复机器人有限公司的上肢康复机器人SFRobot作为研究对象, 该上肢康复机器人适用于脑卒中、 外伤、 术后等原因所致的上肢功能障碍患者。整个系统包括患者训练设备和医生操作界面。康复机器人具有6个自由度: 肩关节内收/外展、 屈/伸、 内旋/外翻、 肘关节屈/伸、 前臂旋前/旋后、 腕关节屈/伸, 能够实现被动训练、 主动训练以及虚拟现实游戏训练, 实物如图2所示。

图2 上肢康复机器人实物 Fig.2 Physical picture of upper limb rehabilitation robot
2.3 测试任务
测试准备: 本次实验的三维运动学数据由瑞典Qualisys公司的光学式运动捕捉系统采集。Qualisys光学式动作捕捉系统使用高速摄像机来精确捕捉带有主动或被动标记点的可测量物体的运动。采集系统由数台超高速红外摄像机Miqus1、 分析软件QTM、 校准设备、 反光标记球Maker和设备固定装置组成。受试者实验场景如图3所示。在受试者右上肢各关节点表面的皮肤表面贴上反光球Marker[12], 要求受试者身穿紧身且无反光材料的上衣, 以减少对实验结果的影响。将6个Miqus1高速红外摄像机分布在上肢康复机器人和受试者周围, 位置摆放以每台摄像机尽可能捕捉到所有Marker点为准[13]。将摄像机与系统网络和PC端正确连接, 启动Qualisys运动捕捉系统配套分析软件QTM, 进行系统标定, 得到系统精度为0.019 mm, 采样频率为100 Hz。
测试内容: 让受试者在上肢康复机器人上模拟卒中患者做5 min被动训练, 训练过程中运动捕捉系统采集受试者身上Marker点的运动数据, 并实时传输到QTM分析软件中; 训练完成后受试者填写主观问卷调查表, 并进行会后访谈。

图3 受试者实验场景Fig.3 Subjects' experimental scenes
2.4 数据处理
将Marker点的运动数据转化为受试者上肢三维模型, 得到受试者肩关节内收外展角度、 肘关节屈伸角度和腕关节屈伸角度数据, 用快速上肢评估量表对受试者上肢进行肌肉骨骼损伤风险分析, 将运动捕捉系统得到的角度数据与上肢康复机器人系统角度做相关性分析, 并计算平均误差, 最后用视觉模拟评分法(Visual Analogue Scale, VAS)对受试者进行主观问卷调查[14]。
3 结果
3.1 安全性验证
根据RULA计算得出15名受试者最后得分均为3分(得分为1或2说明该工作环境比较舒适; 得分为3或4说明该工作环境需要进一步深入研究; 得分为5或6说明该工作环境需要尽快改进; 得分为7或8, 说明该工作环境需要立即调查并改进)。如图4所示, 说明该上肢康复机器人说明该工作环境配置相对合适, 不会对受试者造成明显的肌肉骨骼损伤, 保证了上肢康复机器人的安全性, 但需要进一步深入研究。
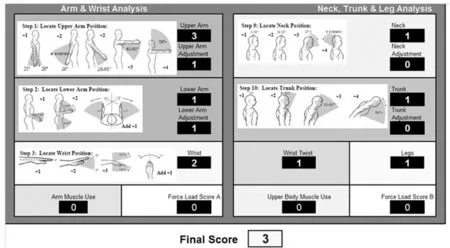
图4 RULA得分Fig.4 RULA scores
3.2 有效性分析
将某位受试者用运动捕捉系统和上肢康复机器人采集到的肩关节内收外展运动角度、 肘关节屈伸运动角度和腕关节屈伸运动角度数据在统计绘图软件中进行曲线绘制, 得到该受试者的关节角度曲线如图5所示, 图中可看出运动捕捉系统采集的角度数据与上肢康复机器人系统角度在肩关节内收外展运动、 肘关节屈伸运动和腕关节屈伸运动总表现出一致性, 平均误差分别为6.09和8.59和0.46。
对15名受试者的运动捕捉数据与上肢康复机器人系统角度数据做配对t检验, 得到相关系数r和P值, 得到角度分析结果显示在表1中。15名受试者的运动捕捉数据与上肢康复机器人系统数据在肩关节内收外展运动和肘关节屈伸运动中均显示显著相关性(P<0.05), 相关系数的平均值分别为0.951和0.823; 而腕关节角度数据在统计结果上显示无相关性, 在腕关节屈伸运动分析中, 上肢康复机器人系统显示腕关节在康复训练过程中无运动产生, 而运动捕捉系统采集到的数据显示腕关节在整个康复训练过程中出现周期性的运动, 两种数据的差异可以从图5(c)中看出。
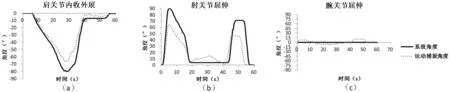
图5 受试者的关节角度曲线图Fig.5 Joint angle curve of the subject
将15名受试者角度数据的平均误差(Mean Error, ME)进行统计, 得到肩关节内收外展运动、 肘关节屈伸运动以及腕关节屈伸运动的平均误差如表1所示。考虑到肩关节、 肘关节和腕关节在实验中的活动范围各不相同, 平均误差无法在同一量级进行比较, 本文选择相对关节活动范围的平均误差(Mean Error Relative to Range of Motion, MER)参数作为评价指标。关节活动范围(Range of Motion, ROM)是评估关节运动学最常用的测量方式[15]。表1中给出了三种关节运动的关节活动范围ROM, 平均误差ME以及相对关节活动范围的平均误差 。三种运动的关节活动范围均在正常范围内, 且运动捕捉数据与上肢康复机器人系统角度数的平均误差ME与关节活动范围ROM呈一定的线性增长关系, 除此之外, 肩关节内收外展、 肘关节屈伸和腕关节屈伸运动相对关节活动范围的平均误差依次增大, 说明上肢康复机器人肩关节、 肘关节和腕关节结构的有效性依次降低[16]。
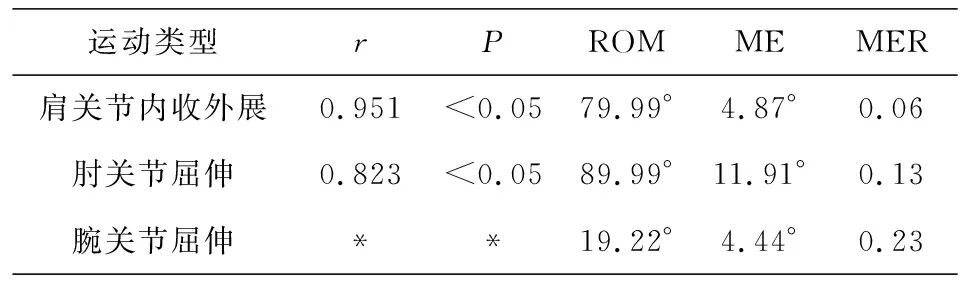
表1 角度分析结果Tab.1 Angular analysis results
3.3 舒适性评价
受试者主观问卷调查表涉及7个与上肢康复机器人舒适性相关的问题, 主观问卷调查总得分为70.85(满分为100分, 其中得分≥70分为满意; 得分31~69分为一般; 得分≤30分为不满意), 表明上肢康复机器人舒适性总体上是令人满意的。对得分结果进行分析得出得分≥70分的人数所占比例均在46.7%以上, 最高达到100%。而得分情况较差的项目主要涉及手臂固定装置的舒适性、 训练过程中肌肉拉伸效果和座位高度设置的问题。
通过会后访谈发现, 有4名受试者反应手部固定装置对手指挤压过度, 在训练过程中出现手指麻木的情况。有3名受试者反应在训练过程中存在手腕过度外翻和过度内翻的现象, 从而使前臂肌肉过度拉伸产生撕裂感, 这种情况与图5(c)中运动捕捉系统采集的腕关节屈伸角度变化规律相符。另外有2位受试者反应座椅高度过低, 他们不得不离开座位表面才能完成康复训练。经过观察发现这两名受试者分别为男生组和女生组中身高为最小值的人, 分别为: 男生1.64 m, 女生1.54 m, 这反应出边缘身高的受试者对上肢康复机器人的舒适性不高, 后期改进设计可考虑增加座椅高度。
4 讨论
本研究基于光学式运动捕捉系统对一款上肢康复机器人进行了可用性测试。用快速上肢评估量表得分保证了上肢康复机器人安全性。通过运动捕捉数据和上肢康复机器人系统数据的相关性分析、 平均误差和相对于关节运动范围的平均误差等对上肢康复机器人的有效性进行分析, 得出上肢康复机器人肩部-肘部-腕部有效性依次降低。由主观问卷调查法进行上肢康复机器人舒适性评价, 从而找出可用性问题。
本研究还存在许多局限性, 主要体现在: 1)上肢外骨骼结构对Marker点造成遮挡造成数据丢失, 尽管采用线性插值的方法对丢失数据进行补偿, 但也对数据造成一定的偏差; 2)Marker点数目较少, 无法进行肩关节屈伸、 肩关节外旋内旋以及肘关节旋前旋后运动分析; 3)仅对上肢康复机器人训练系统进行了可用性测试研究, 软件系统的可用性尚待验证。
5 结语
本研究的报告结果为从事上肢康复机器人产品设计人员指出了改进设计的方向, 提出的上肢康复机器人的可用性测试方法为医疗器械可用性测试工作者建立了可用性测试框架模型, 并从关节角度运动学的角度分析了上肢康复机器人的可用性, 今后的研究可以从关节动力学以及功能分析等方向进行研究。
猜你喜欢
包装工程(2023年24期)2023-12-27 09:18:26
海洋信息技术与应用(2021年1期)2021-06-11 01:20:34
中国临床医学影像杂志(2019年5期)2019-08-27 02:47:56
中国临床医学影像杂志(2019年4期)2019-06-18 10:54:58
测控技术(2018年6期)2018-11-25 09:50:08
中国自行车(2018年4期)2018-05-26 09:01:53
中国医学装备(2016年6期)2016-12-01 06:44:26
中国民族医药杂志(2016年7期)2016-05-09 07:49:09
实用手外科杂志(2015年2期)2015-08-28 09:50:58
实用手外科杂志(2015年1期)2015-08-27 01:52:10