一种仿生多功能助残机器人设计
2020-04-14 11:18:46杜妍辰孙隐
生物医学工程学进展 2020年1期
杜妍辰, 孙隐
上海理工大学 医疗器械与食品学院(上海,200093)
0 引言
近年来, 随着昆虫仿生学理论与计算机技术的飞速发展, 使得仿生助残机器人的研究, 成为大家关注的焦点。身体的残缺给残障人士的生活带来了诸多不便, 残障人士需要独立完成一些活动尤其是野外的活动很困难, 然而, 机器人的应用使得这些困难有所改善。国内学者对助残机器人有了大量的研究, 姚玉峰等[1]提出了以电动轮椅作为基础单元的模块化设计方案; 樊炳辉, 刘圭圭等[2]提出基于双目立体视觉的人机交互方式, 达到保持手部平衡的情况下运动到指定位置; 唐矫燕等[3]在两足步行椅机器人的基础上,对助残机器人人在环中控制系统进行分析和研究, 设计了一种新型的仿生多功能助残机器人, 利用其良好的机动性和适应性,使得在何种环境下都能为残障人士所用, 因其具有较为灵敏的避障和越障能力,可以为残障人士单独外出安全引路[4], 同时该机器人有较好的平衡度。
1 前肢的设计
仿生多功能助残机器人的前肢设计灵感来源于螳螂, 如图1。螳螂两个胸足的功能是运动, 作为其中之一的步行足和攀缘足的附节多带有刚毛, 前跗节可以一定程度的弯曲, 使之更紧密地抓紧地面和树干, 增加接触面积, 提供更大的摩擦力。将此结构用于助残机器人, 将最大程度地解决存在的问题。
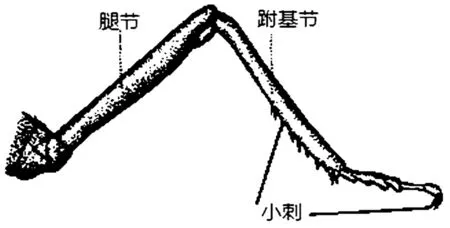
图1 螳螂下肢
Fig.1 Lower limb

图2 本设计前肢仿真图
Fig.2 Design product forelimb simulation
前足可以实现抓合和舒展, 前肢仿真图如图2所示。当遇到道路崎岖不平、 坡度较大、 路面湿滑、 障碍物情况复杂且难以通过, 普通轮子靠滚动摩擦抓地不牢的情况下, 通过调试前附节的抓放程度, 使之抓紧地面或其他着力点, 实现高难度的越障功能。另外, 跗节带有的刚刺可以刺进物体表面, 实现强制夺取受力点, 为帮助残障人士通过斜坡地段提供了可能。仿生机器人也可帮助上下楼梯去取一些物品。
2 三种步态的变换
2.1 平坦道路上可采用四轮着地, 后轮驱动的形式高速行驶
平坦的道路上, 仿生多功能助残机器人采用四轮前进的方式进行行走, 采用四轮变换的特点使其运动更灵活, 运动平稳性高, 极大地提高了残疾人士的舒适度, 如图3所示。而且此设计采用曲柄伸长设计, 在保证设计结构简洁, 负重轻便的情况下, 最大程度为使用者增加使用空间。

图3 三维仿真模拟四轮行走Fig.3 3D simulation simulation of four-wheeled walking
2.2 复杂道路上, 可用附节模拟昆虫攀爬, 低速行驶
在复杂道路上采用前足仿生昆虫附节设计, 提高了机器人运动和越障的灵活性, 此种设计由于仿生结构的存在, 前肢的抓地力显著提高, 保证机器人可以攀爬一些障碍物, 如图4所示。为使其运行平稳, 利用摄像头可以有效观察路面情况, 为一些盲人残疾人独自出行提供可能性。

图4 三维整体渲染图Fig.4 3D overall rendering
2.3 机器人可通过调控攀爬楼梯等复杂情况
红外避障传感器(以下简称红外)具有一对红外信号发射与接收二极管, 发射管发射一定频率的红外信号[5], 接收管接收这种频率的红外信号, 当红外的检测方向遇到障碍物(反射面)时, 红外信号反射回来被接收管接收, 经过处理之后, 通过数字传感器接口返回到机器人主机, 机器人即可利用红外波的返回信号来识别周围环境的变化, 以实现复杂情况下帮助残疾人士的目的, 如图5所示。
图5 机器人爬楼梯Fig.5 Robot climbing stairs
3 三维仿真设计及模拟
三维仿真设计图如图6所示, 仿生多功能助残机器人中间部分采用双机械手的设计方式, 机械手可以代替人类在恶劣有害、 极端环境下按程序实现抓取、 搬运、 操作工具等动作。也可以在复杂的环境下通过自身调节调整位置、 调整姿态等。
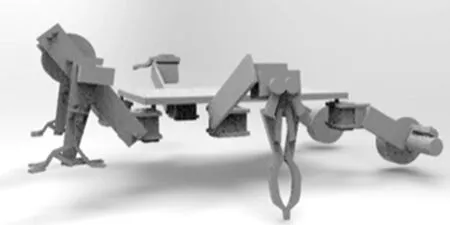
图6 三维仿真图Fig.6 3D simulation
4 仿生多功能助残机器人的应用
将背椅机构安装在仿生多功能助残机器人上可以形成一种新型的助残轮椅, 如图7所示。这种轮椅结构利用仿生多功能助残机器人的优点, 可以有效地帮助残疾人士进行上下楼梯的活动, 同时使用者只需用P2P手柄无线传送模块遥控利用机器手机构帮助残疾人方便地拿取物体。
5 总结
仿生多功能助残机器人技术与智能检测技术的有机结合, 实现了检测平台的可移动化和机器人的仪器化; 使用简单, 使用者只需用P2P手柄无线传送模块遥控。 技术特点和优势: 体积较小, 质量较轻, 可活动范围广, 机械传动简单, 能精确地实现勘探、 避障和图像采集, 能够替代残疾人士进行一些复杂环境下的活动、 现场信息采集以及巡视设备工作状况等。
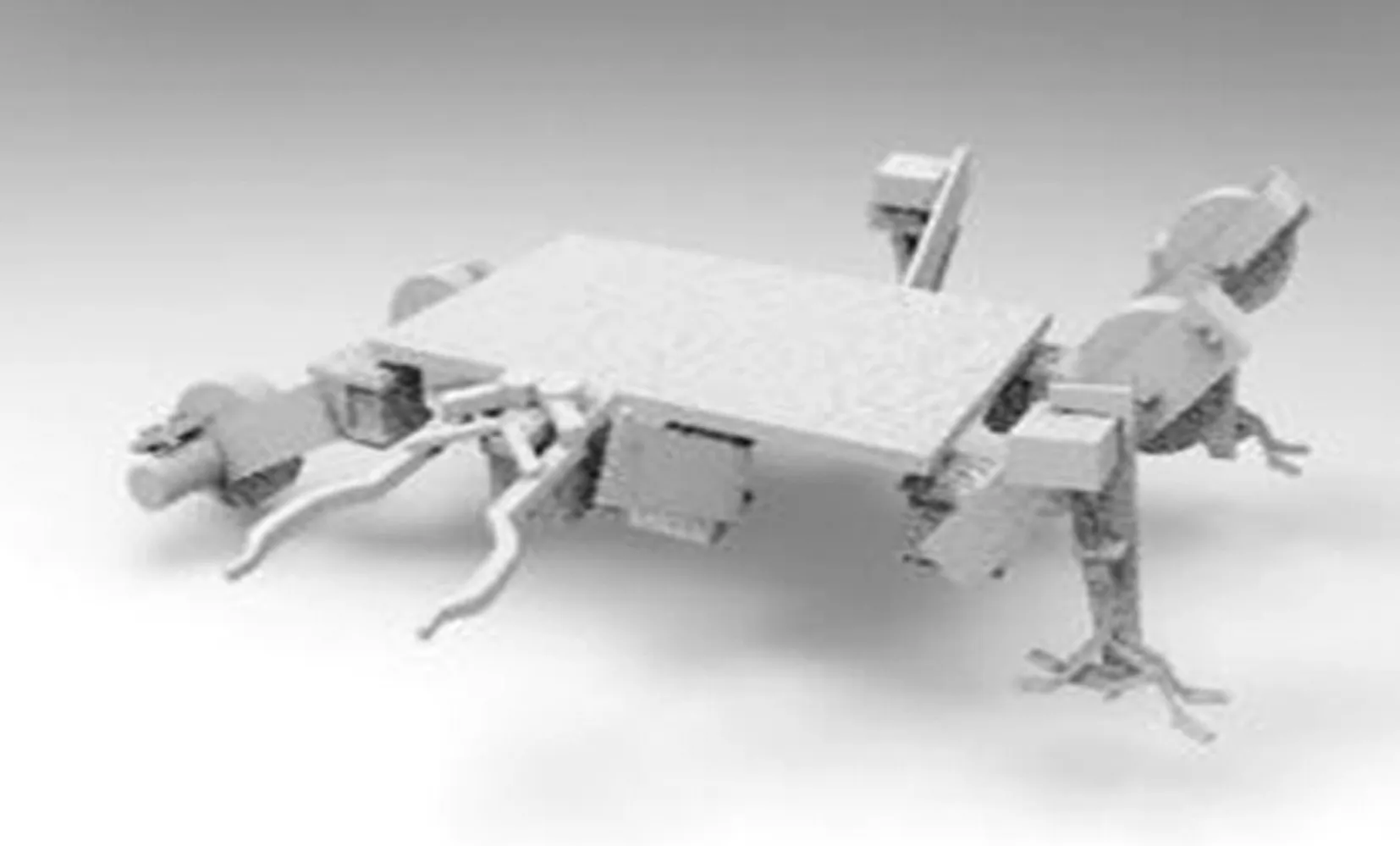
图7 平台应用Fig.7 Platform application
仿生多功能助残机器人前足仿生昆虫附节设计, 提高了机器人运动和越障的灵活性。 可模拟昆虫运动, 实现了多功能野外勘探机器人运动模式的多样性, 使其对环境的自适应能力增强, 具有模块化和可重组特点, 多足爬行和四轮变换的特点使其运动更灵活, 运动平稳性高。可替代人在复杂的环境下工作; 有很广泛的市场需求和较高的性价比, 经济效益较高; 零件更换简单, 框架结构可以降解等特点; 具有很高的实用性和可操作性。
猜你喜欢
华人时刊(2021年17期)2021-12-02 03:26:04
河北画报(2020年21期)2020-12-14 03:16:10
汉语世界(The World of Chinese)(2019年5期)2019-11-11 07:35:22
新农业(2019年5期)2019-06-28 13:20:59
海峡姐妹(2019年5期)2019-06-18 10:40:44
现代营销(创富信息版)(2018年8期)2018-09-08 08:51:54
科学家(2017年24期)2018-01-11 17:41:12
大自然探索(2017年7期)2017-07-25 07:39:04
发明与创新·大科技(2016年9期)2016-09-19 05:22:08
知识经济·中国直销(2016年11期)2016-02-27 16:17:21