内镜电动缝合器的设计与研究
2020-04-14 11:18:46刘孝忠杨玉婷宋成利
生物医学工程学进展 2020年1期
刘孝忠,杨玉婷,宋成利
上海理工大学 教育部微创医疗器械工程研究中心(上海,200093)
0 引言
随着微创治疗技术的迅速发展, 内镜黏膜切除术(Endoscopic Mucosal Resection, EMR)和内镜黏膜下剥离术[1-2](Endoscopic Submucosal Dissection, ESD)作为治疗消化道早期癌症和消化道息肉切除的技术获得广泛的认可, 从而导致微创手术技术得到广泛应用[3-4]。与此同时, EMR和ESD手术后创面的闭合问题在技术操作上十分复杂, 如果创面闭合不充分, 将会导致严重的医源性术后并发症[5-7]。因此, 这就需要一种内镜下缝合器械, 可以很好的满足内镜手术后的创面闭合问题。
金属夹(Through-The-Scope-Clips,TTSC)操作简便, 可靠性好, 因此被广泛应用于消化道的止血和小创面的闭合, 但是TTSC金属夹只适用于闭合2 cm以下的创口, 并且其夹持力小, 抗滑脱性差[8]。目前在售的内镜缝合器有 Endogastric Solutions公司的缝合装置 EsophyX[9], Apollo Endosurgery 公司的 OverStitch[10]等。缝合器较金属夹而言虽能提供可靠的治疗效果, 但其操作过于复杂, 灵活性也欠佳, 目前临床应用较少, 只在组织缺损或缝合面积较大时才考虑使用[11]。
传统的内镜连续闭合止血器械[12]操作复杂, 需要第二个人来进行缝合过程中的定位, 夹取组织、 推送金属夹[13]以及释放金属夹等一系列动作不仅延长了手术的时间, 还加大了手术的成本。此外, 医院也需要训练更多的医生熟悉这一系列的操作。针对以上问题我们设计一种内镜电动缝合器。不仅可以完成组织闭合的一系列动作, 相较于传统的内镜连续闭合止血器械更加平稳, 准确性更高。此外, 还极大程度上减轻了医生操作的复杂程度, 从而提高了手术的自动化程度, 便捷性和精准性。
1 材料与方法
1.1 电动内镜缝合器的工作原理
内镜连续缝合器械由驱动模块、 执行模块、 传动模块与控制模块组成, 如图 1所示。 其中驱动模块包括电机、 螺杆和活动板。执行模块由抓钳和金属夹组成, 抓钳装置在保护管远端, 用于抓取、 聚拢组织, 其中间设有槽沟, 前端为向内弯曲的弧形面, 其与槽沟共同构成金属夹通道。保护管内可放置4个金属夹, 由推座依次推送。金属夹头端是可弯曲的细臂, 可在外力作用下相向弯曲 90°后实现闭合 。传动模块由钢丝和钢管以及热塑管组成。驱动模块提供的动力由传动模块传递到执行模块, 完成抓钳的张开和闭合、 金属夹的释放等动作。
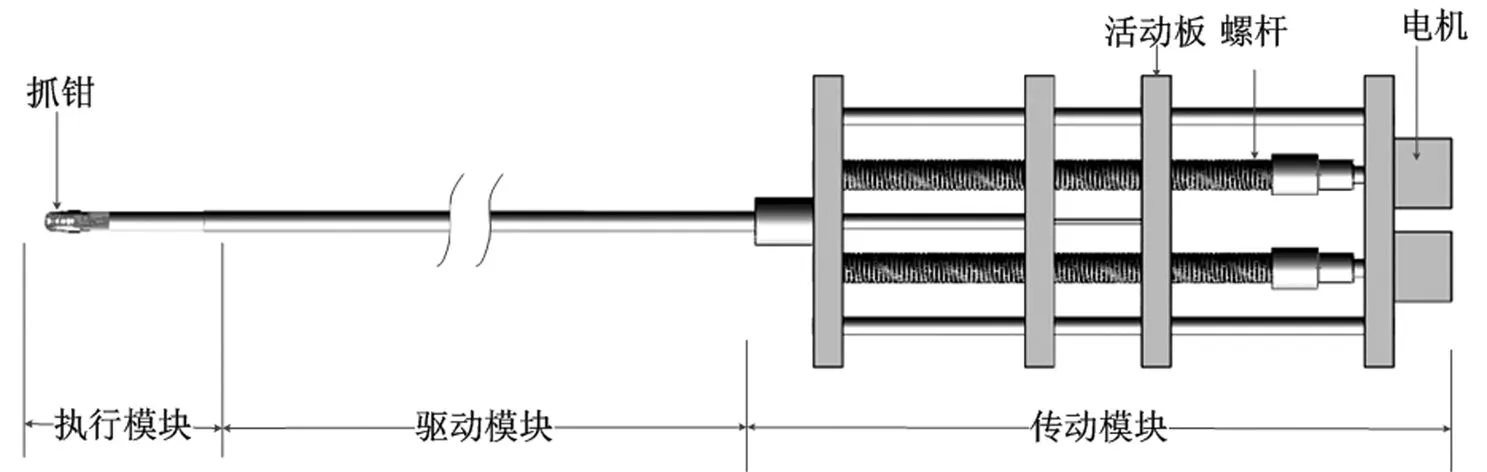
图1 电动内镜缝合器示意图Fig.1 Schematic diagram of electric endoscopic suture device
工作时, 器械通过内窥镜(胃镜、 十二指肠镜或结肠镜)钳道到达病灶处, 用外置抓钳抓取病灶一侧, 可反复调整器械与组织的相对位置, 见图2(a); 待位置理想后, 收紧抓钳并锁定, 见图2(b); 推送金属夹, 当金属夹两前臂完全穿透组织后, 前臂顶端接触抓钳头部, 使两前臂强迫产生塑性变形, 最后相向交错弯曲直至完全闭合, 见图2(c); 完成金属夹释放, 此时可重新张开抓钳, 以同样方法施放其余金属夹, 见图2(d)。
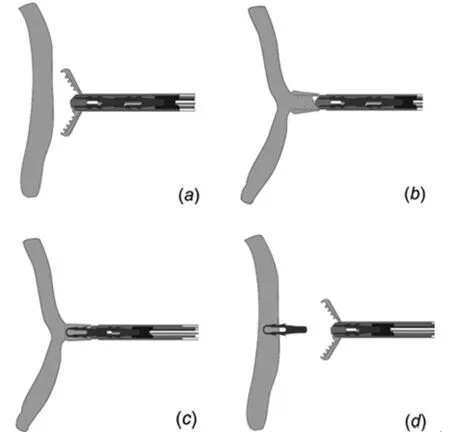
图2 抓钳动作示意图Fig.2 Schematic diagram of gripper action
1.2 电动控制系统测试平台的搭建
为完成图2所示的步骤, 则必须使电控部分(软件控制系统, 直流电机)有很高的稳定性, 灵敏性和精准性[15-16]。为此, 为了测试电控部分的稳定性和精准性我们搭建了一个测试平台[17-18], 如图3所示。测试平台主要由软件控制的电机、 机械驱动机构和数据采集装置三个部分组成, 固定于水平的工作台上。
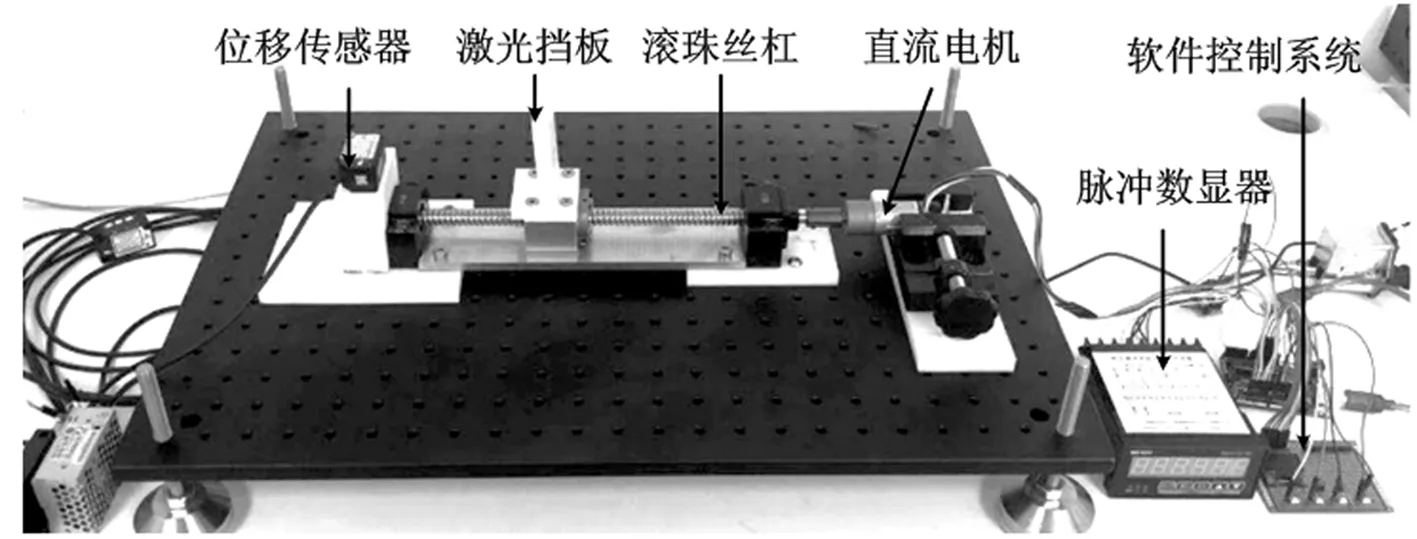
图3 测试平台Fig.3 The test platform
1.2.1 软件控制系统
软件控制系统由处理器、 控制电路、 驱动电路、 按键及液晶屏组成, 通过按键可以实现电机的正反转, 改变编码器脉冲数。从而实现对电机的精准控制[19-20]。
1.2.2 机械驱动机构
机械驱动机构由滚珠丝杠, 激光挡板, 夹具组成。激光挡板固定在滚珠丝杆的滑块上面, 滚珠丝杠型号为1204, 导程为4 mm。将丝杆通过联轴器与电机杆联结, 启动电机时, 丝杆转动, 与丝杆配合的滑块以及激光挡板就会在光滑的滑板上移动。
1.2.3 数据采集装置
数据采集由位移传感器和脉冲计数器两个传感器完成。位移传感器型号为USB-DAQ-280G, 如图4所示。该传感器提供2个单端模拟输入通道, AI分辨率达24位, 可以精确到0.01%。采用位移传感器进行测距, 利用USB数据采集卡接收数据并输送到计算机, 在数据记录界面进行显示。YF600脉冲计数器表(见图5)具有频率高、 设置方便简单、 工作稳定精度高的优点。

图4 双通道位移传感器
Fig.4 Double-channel displacement sensor

图5 脉冲数显表
Fig.5 Pulse digital display meter
1.2.4 试验原理与方法
通过设计软件来实现对电机的角位移、 转速进行精准的控制, 是器械设计中的重要一环, 关于软件的设计不在本文讨论范围内, 本节重点关注于在已经完成控制系统设计后, 对控制系统在正反转、 不同转速的情况下是否可以完成精准定位进行试验研究。直流电机的控制原理是可以通过脉冲数来控制电机的角位移, 通过PWM波占空比大小(脉冲的频率)来控制电机的转速。
试验过程中, 在控制电机的单片机写入一个脉冲数N, 设电机单个脉冲的角位移为w, 电机的减速比为i, 螺杆的导程为p。因此, 丝杆上的激光挡板理论的移动距离L的计算式如式(1)所示:
(1)
我们将位移传感器设置好之后, 位移传感器的激光发射和接收装置就会测出此时激光挡板与位移传感器的激光发射和接收装置的距离, 并在位移传感器的软件端显示出这个距离。因为位移传感器精度较高, 可以精确到万分之一米, 所以软件端显示的数字会出现跳动, 需要等到数字完全稳定下来再进行读数。试验过程中我们在同一个PWM波占空比下每间隔100个脉冲数采集一组, 每一组测试20个数据。
由于电机需要承受负载, 经实验, 当PWM波占空比在70%以下时, 电机不能正常驱动负载。因此选择PWM波占空比为80%和100%情况下来测试不同转速情况下电机控制的精准性。当我们在电机正转情况下测试完一组数据后, 通过单片机使电机反转, 通过这种方式完成电机在反转情况下的测试。同样的我们可以得到电机反转时的一组20个数据。在试验过程中我们发现脉冲数低于136个的情况下, 脉冲数显器无法进行计数, 因为脉冲数过小, 无法准确检测, 为了方便比较, 选择从编码器脉冲数为200个到1 500个。
1.3 电动缝合器样机制作
1.3.1 驱动机构制作
活动板采用有机玻璃材料, 经数控车床加工制作完成, 直径为50 mm。四个固定孔通过过盈配合分别装配4个滚珠直线轴承, 轴承内圈与不锈钢柱配合。在轴承作用下活动板可以沿不锈钢柱滑动。活动板与螺杆形成配合的两个孔中一个有螺纹另一个无螺纹, 与螺杆形成交错。此设计两个活动板为两个独立运动的单元, 通过配合可以顺利完成钳口张开闭合与金属夹的推送运动。样机上的抓钳机构, 抓取组织用的金属夹由数控车床加工制作完成。
1.3.2 电动缝合器功能验证
将完成的机械部分与电控部分联结好后的电动缝合器如图6所示。为验证电动缝合器的功能, 验证试验用一块海绵代替软组织, 用加工好的4个金属夹置于钳口内的金属夹匣子内, 调整好机械传动部分活动板的相对位置, 通过单片机控制电机来完成验证过程。
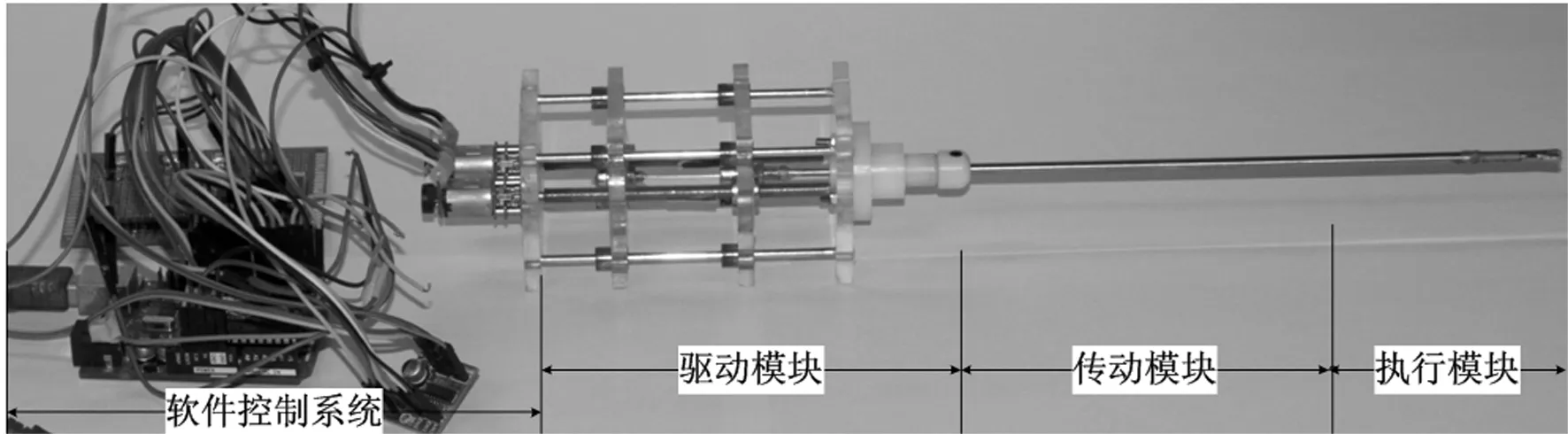
图6 电动内镜缝合器样机图 Fig.6 Prototype drawing of electric endoscopic suture device
验证试验主要分为三个步骤。第一步: 如图7(a)所示, 在一块海绵上切出一块约40mm长的切口, 并将四个经线切割加工好的金属夹, 置于钳口内的金属夹匣子内。第二步: 如图7(b)所示, 金属钳张开咬合组织, 并完成推送金属夹的过程。第三步: 如图7(c)所示, 释放完成所有的四个金属夹, 软组织切口被完好的闭合。整个实验过程, 器械有着良好地稳定性和精准性, 能够良好地完成预设定操作步骤。
2 结果与分析
在测试电机精准控制的试验中, 我们分别在PWM波占空比为80%和100%的情况下各测得14组数据, 电机正反转得到的数据记录在同一组, 每组20个数据。
将试验的组数和距离误差数据导入Matlab 2016中, 对数据进行三阶拟合, 结果如图8所示。
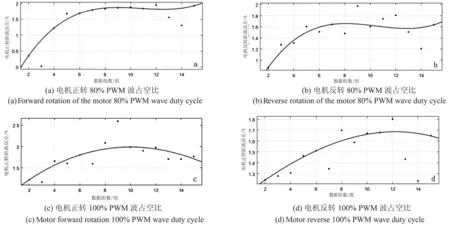
图8 数据拟合结果图 Fig.8 Data fitting result diagram
从图8可以看出, 电机在正转和反转时距离的准确值均在2%以下, 且在第4组数据以后渐渐达到稳定状态, 说明电机的正、 反转对电机的精准控制无影响。电机的PWM波占空比对位移准确率影响很小, 电机的转速对电机的影响很小。
3 讨论
所设计的内镜下电动缝合器能较好解决现有内镜金属夹产品存在的问题, 相较于传统手动器械, 电动的可以更加稳定, 精准地释放金属夹, 减少了因手术操作不当造成的穿孔, 损伤重要脏器的问题。此外, 其可以一次性连续施放4个金属夹, 解决了以往产品装填繁琐的问题。利用抓钳抓取组织解决了其他金属夹不能多次定位的问题, 克服了胃肠蠕动造成的施夹定位困难。因此, 具备这些优点的内镜缝合器在临床上有极大的应用价值。
本研究重点在于软件控制的准确性, 因为我们必须确保在电动环境下, 准确完成一系列的手术操作, 因此器械必须在一个很复杂的手术环境中[21]达到很精确的定位, 但在检验软件控制部分的试验时只考虑了转动方向, 转速对准确定位的影响。除此之外, 在钢丝推动金属夹时会存在较大的摩擦力, 但是在试验过程中我们并没有设置相同的摩擦环境来测试软件控制系统。
本驱动结构部分, 没有设计相应的反馈器件和限位结构, 对于在临床出现的一些控制失灵现象缺乏足够的安全措施, 在验证缝合器功能试验时, 也存在一定局限性, 如无法模拟复杂的施夹情况。在穿透组织时, 对组织模型作了简化。后续工作将针对不足之处予以改进, 并进行实验加以对照。
4 结论
我们设计了一种全新的内窥镜用缝合器械, 其驱动机构通过两个活动板将两个电机的旋转运动转变为线性运动, 可以满足设计要求的抓钳的张开与闭合, 金属夹的推送动作。本研究依据设计的三维图, 制作完成了电动缝合器样机, 并且完成了样机的功能验证试验, 表明设计满足要求。针对器械要求的定位准确问题, 我们搭建软件控制部分测试平台, 验证了软件控制部分的准确性。目前在驱动机构的稳定性上仍存在一些问题, 可以通过提高加工精度使之更加满足设计要求。
猜你喜欢
小读者(2021年2期)2021-03-29 05:03:20
中国设备工程(2020年16期)2020-08-28 09:04:16
科学技术创新(2020年20期)2020-08-11 04:10:38
汽车观察(2018年10期)2018-11-06 07:05:28
通信电源技术(2018年8期)2018-10-15 07:02:20
车迷(2017年10期)2018-01-18 02:10:46
北京汽车(2017年3期)2017-10-14 02:15:52
淮海医药(2015年1期)2016-01-12 04:33:11
今日教育·幼教金刊(2015年10期)2015-11-28 01:27:19
意林(2015年20期)2015-10-21 11:21:08