
基于棱镜阵列接收机的多小区可见光系统研究
2020-04-13 17:36赵政铎岳殿武刘建开肖佳琳
光通信研究 2020年1期
赵政铎,岳殿武,刘建开,肖佳琳
(大连海事大学 信息科学技术学院,辽宁 大连 116026)
0 引 言
随着现代通信技术的迅速发展,便携式通信终端的数量和对无线通信网络接入的需求都在急剧增加[1]。无线射频(Radio Frequency,RF)网络由于频谱资源有限,无法满足日益增长的通信速率需求[2]。利用商用发光二极管(Light Emitting Diode,LED)的 可 见 光 通 信 (Visible Light Communication,VLC)凭借其优势,被认为是下一代无线通信网络的一个强大替代或补充技术[3]。VLC具有更低的能量消耗和更高的安全性[4]。与传统的RF通信不同的是,VLC通过LED发出的高速明暗闪烁信号来传输信息,可以应用于禁止电磁信号的领域,如医院、工业和航天应用。
由于LED的调制带宽有限,面临着低数据速率传输的问题。为此,在VLC系统中通过多输入多输出(Multiple-Input Multiple-Output,MIMO)利用空间复用来提高数据速率[5]。由于强度调制/直接 检 测 (Intensity Modulation/Direct Detection,IM/DD)信道不能提供丰富的散射环境,MIMO在VLC中的应用面临着一定的挑战。文献[6]通过使用光电探测器选择(Photodetector Selection,PDS)的成像接收机,降低了信道相关性。许多重要的VLC应用都需要体积小的接收设备,由于成像接收机体积大、成本高,很难集成,因而不是一个好的选择[7]。在单用户 MIMO系统下,文献[8]提出了基于棱镜阵列的非成像接收机。这种接收机一方面能够在紧凑的结构下提供良好的性能;另一方面,LED的光束角度有限,一个LED阵列只能覆盖一定的区域。类似于蜂窝移动网络,使用大量的LED阵列可以形成多小区VLC系统[9]。在这样的多小区系统中,用户接收的信号可能受小区间干扰和小区内部干扰的影响。块对角化(Block Diagonalization,BD)预编码方法常用来抑制多用户干扰[10]。文献[11]研究了多小区多用户多输入单输出(Multi-Input Single-Output,MISO)系统,通过多种小区协作策略最大化了用户的和速率。
鉴于此,本文研究了多小区多用户 MIMOVLC系统,并将基于棱镜阵列的非成像接收机与空间分离接收机进行了性能比较。结果表明,基于棱镜阵列的非成像接收机能够实现更优的可靠性能。通过改变LED的配置,减少了干扰区的面积。在此基础上,讨论了两种多小区实现方案:第1种是动态小区划分,第2种是非动态小区划分。经过PDS后,两种方案都能有效消除小区间干扰。最后仿真验证了所提方法的有效性。
1 多小区VLC系统模型
1.1 信道模型
在VLC室内系统中,有两种主要的链路模型:视距(Line of Sight,LOS)和非视距(Non-Line of Sight,N-LOS)。本文只考虑LOS链路,因为其在接收端的接收功率超过总功率的95%[8]。将LED看做是一个朗伯体光源,基于棱镜阵列的非成像接收机有较大的视场角,能够在小区的任意位置接收到信号,并且每个接收单元有很强的方向性,只能接收到来自特定方向的光。图1所示[8]为一个接收单元,它包含一个棱镜和一个光电二极管(Photo-Diode,PD)。光的方向用 (φ,α)表示,φ和α分别为入射角和极角。由于LED与接收机之间的距离远大于接收机的尺寸,假设到达接收机的光线都是平行的。棱镜的上表面ABED垂直于不透明的侧面ABC、BEFC和DEF,面ABED和面ACFD的夹角为β。假设侧面完全吸收入射到其表面的光,因此,没有光可以通过这些表面,也没有光从这些表面反射回棱镜。所以,只有从棱镜的顶面和斜面经过两次折射的光到达PD,并假设PD能够收集所有从斜面折射出来的光。从棱镜顶面到PD的光功率损失,是由上表面和倾斜表面的反射以及侧面的吸收引起的。基于棱镜阵列的接收机将每一个接收单元的上表面放置在同一平面上,图2所示为带有NR个接收单元的接收机的俯视图。

图1 一个接收单元

图2 接收机俯视图
设表面ABED的入射角、表面ABED的折射角、表面ACFD的入射角和表面ACFD的折射角分别为α1、α2、α3和α4。信道增益H 可以表示为

式中:d为LED到接收机的距离;m为发光方向性的模式参数为LED的半功率角;Su为上表面ABED的有效接收面积;ψ为LED的出射角;φ 为上表面 ABED 的入射角;Tair-lens(α1,α2)为表面ABED折射的光功率与入射的光功率之比;Tlens-air(α3,α4)为表面 ACFD折射的光功率与入射的光功率之比。
1.2 多小区多用户 MIMO VLC系统
在多小区多用户VLC系统中,每个小区包含Nt个LED发射机和k个用户设备(User Equipment,UE)。第j个 UE包含 Mr,j个PD,PD的总数为Mr=,同一时间,第j个 UE只有Nr,j个PD被激活,因此被激活的PD总数Nr=Nr,j。要求每个LED都能够完全覆盖本小区,由于LED照明范围的重叠,小区交界处会出现干扰区影响通信性能。可以通过设置适当的参数以及倾斜LED来减小干扰区面积。
对于第c个小区的第j个用户而言,其接收到的信号可以表示为

式中:uc为c小区用户的集合;uc'为其他小区用户的集合;Hc,j为c小区内LED到第j个用户的信道矩阵;Hc',j为其他小区内LED到c小区第j个用户的信道矩阵;Pc,j为c小区第j个用户的编码矩阵;Pc,i(i≠j)为c小区其他用户的编码矩阵;Pc',i为其他小区用户的编码矩阵;xc,j为发送给c小区第j个用户的信号;xc,i(i≠j)为发送给c小区其他用户的信号;xc',i为发送给其 他小区 用户的 信号;nc,j为加性高斯白噪声。
为了便于分析,仅考虑两个小区,每个小区内两个用户的情况。用户分布可以分成两种情况:(1)所有用户都位于非干扰区,不需考虑式(2)中小区间干扰的影响;(2)有用户位于干扰区,要综合考虑小区内部和小区间干扰的影响。
1.2.1 动态小区
当用户都处于非干扰区时,对每个小区中的用户分别进行BD编码。当有用户处于干扰区时,将两个小区合并为一个小区,对所有用户进行联合BD编码。
块对角化预编码器(Block Diagonalization Precoder,BDP)的处理过程简介如下[10]:对于c小区中的用户j,当用户都处于非干扰区时,我们定义其干扰矩阵=[]H,式中,K为该小区的用户数量。当有用户位于干扰区时,其干扰矩阵=[,…,,,…,]H。 对进 行 奇 异 值 分 解(Singular Value Decomposition,SVD)得 到=,式 中为 左 奇 异 向 量 矩 阵;[]为右 奇异向 量矩阵由非零奇异值对应的右奇异向量构成为的正交零空间矩阵,对其进行SVD分解,可得到==;Λj为大小为Nr,j×Nr,j的奇异值对角化矩 阵;Uj为大小为Nr,j×Nr,j的解码矩阵;为大小为Nr,j×Nr,j右奇异值矩阵。最终,可以得到第j个 用 户 的 预 编 码 矩 阵Pj= [,…,]T=。
当用户相距较近时,信道矩阵可能不满秩,从而导致通信质量很差,可以使用PDS技术解决这一问题。在PDS方法中,人们常使用最大最小奇异值(Maximum and Minimum Singular Value,MMSV)准则[12];文献[13]指出,在空间多路复用系统中,单用户接收信噪比的下界与等效信道的最小奇异值成正比,多用户系统的最大系统误码率(Bit Error Rate,BER)由性能最差的用户决定。基于以上讨论,我们也使用MMSV准则。
MMSV-PDS方法的步骤如下:
第1步:在BDP的限制下,创建一个候选的集合mp对应满秩的整体信道矩阵,每个用户包含Nr,j(j=1,…,K)个被激活的PD。这个候选的集合mp是总的Mr个PD集合Ωp的一个子集,即mp∈Ωp。
第2步:对每一个候选子集mp,将(j=1,……,K)进行SVD得到

式中,Λj,mp为与mp相关的第j个用户的信道矩阵。这样,对于给定的mp,可以得到第j个用户的最小奇异值λminj,mp=min{diag(Λj,mp)}。接下来可以得到所有用户的最小奇异值
第3步:选择PD集合mp,使其满足mp,solution=},这就是最终要激活的PD集合。
1.2.2 非动态小区
在这种小区划分方案中,不论用户是否处于干扰区,都将每个小区中的用户分别进行BD编码,将来自其他小区的光视为干扰。
基于棱镜阵列的非成像接收机,由于每一个接收单元都有较小的视场角,且有很强的方向性,因此,只能接收到来自特定方向的光。当β为45°时,与入射光方向相关的归一化信道增益仿真结果如图3所示。由于每个小区内用户受到的小区间干扰都是来自特定方向,因此,利用这一特性来消除小区间干扰。

图3 归一化信道增益
非动态小区消除干扰的步骤如下:
第1步:对于每个用户,首先选出没有小区间干扰的PD 集合Zp,其中包含Zr,j(j=1,…,K)个PD,满足 Mr≥Zr,j≥ Nr,j。
第2步:根据1.2.1节讨论的MMSV-PDS方法,在集合Zp中选出满足MMSV条件的PD集合np。这就是相应的用户要激活的PD集合,最终得到一个没有小区间干扰的满秩信道矩阵。
第3步:对每个小区中的用户进行BD编码,消除小区内部干扰。
1.2.3 复杂度分析
在讨论的 MMSV-PDS方法中,对于一个候选集合mp,其中包含了K 个用户。相关的计算复杂度主要取决于2 K次SVD运算和K 次矩阵乘法运算,可以通过每秒浮点运算次数(Floating Point Operations Per Second,FL OPS)衡 量。 根 据 式(3),通过SVD运 算 得 到,通过矩阵运算得到,通过 SVD 运算得到 Λj,mp,所需要的FL OPS分别表示为aj、bj和cj。在VLC系统中,上述提到的操作都是在实矩阵上进行的,一个A×B的实矩阵乘以一个B×C的实矩阵,需要2ABC次FL OPS。对一个A×B的矩阵进行SVD操作,如果只考虑乘法运算,忽略加法运算,大约需要(9A3+8A2B +4AB2)次 FLOPS[14]。
当有用户处于干扰区时,对于动态小区划分方案,其计算复杂度可以为

式中:Mr,j为每个UE包含的PD数量;Nt为LED发射机数目;Nr,j为被激活PD的数量。=Nr-Nr,j。对于非动态小区划分方案,其计算复杂度可以表示为

式中,Zr,j为每个UE中无小区干扰的PD数量。
当用户都处于非干扰区时,两种小区划分方法的计算复杂度相同,可以表示为

2 仿真结果及分析
在这部分,通过选择合适的LED配置对干扰区进行优化。通过仿真分析动态小区划分和非动态小区划分的BER性能。所考虑的多小区多用户VLC系统如图4所示。除其他说明外,房间、LED和接收机的参数如表1所示。在仿真中,考虑了以下用户位置的场景:
用户1:UT1=(-4,0,0)、用户2:UT2=(-3,1,0)和用户3:UT3=(3,0,0),用户1和用户2位于第1个小区,用户3和用户4位于第2个小区,用户4在第2个小区中移动。
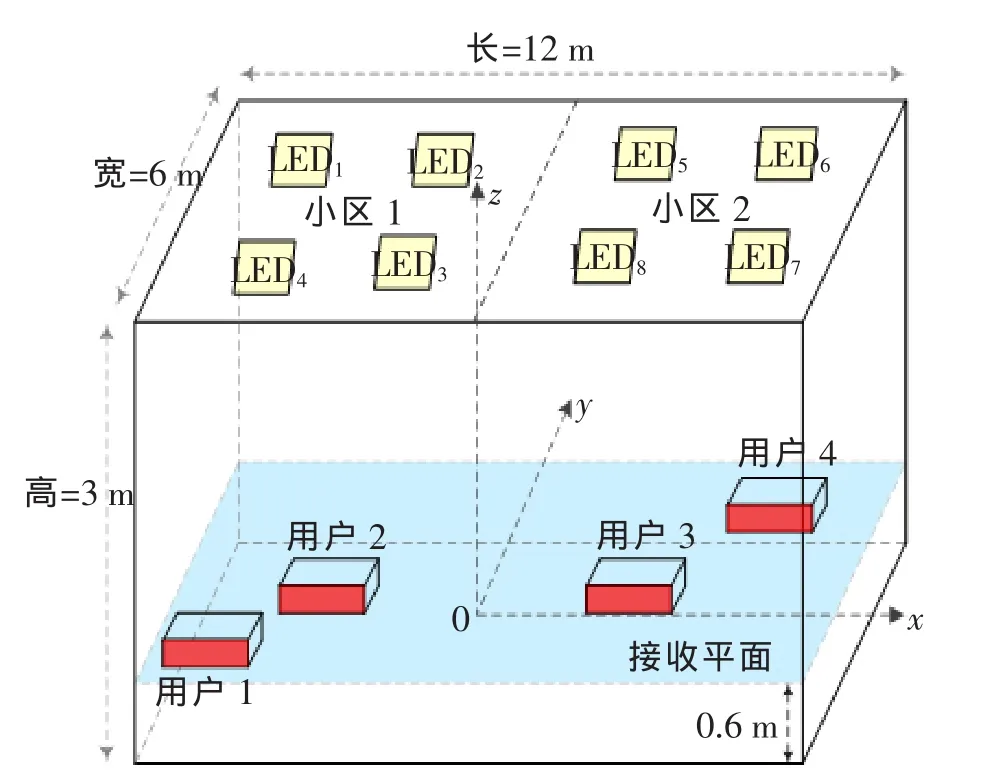
图4 VLC系统的几何示意图
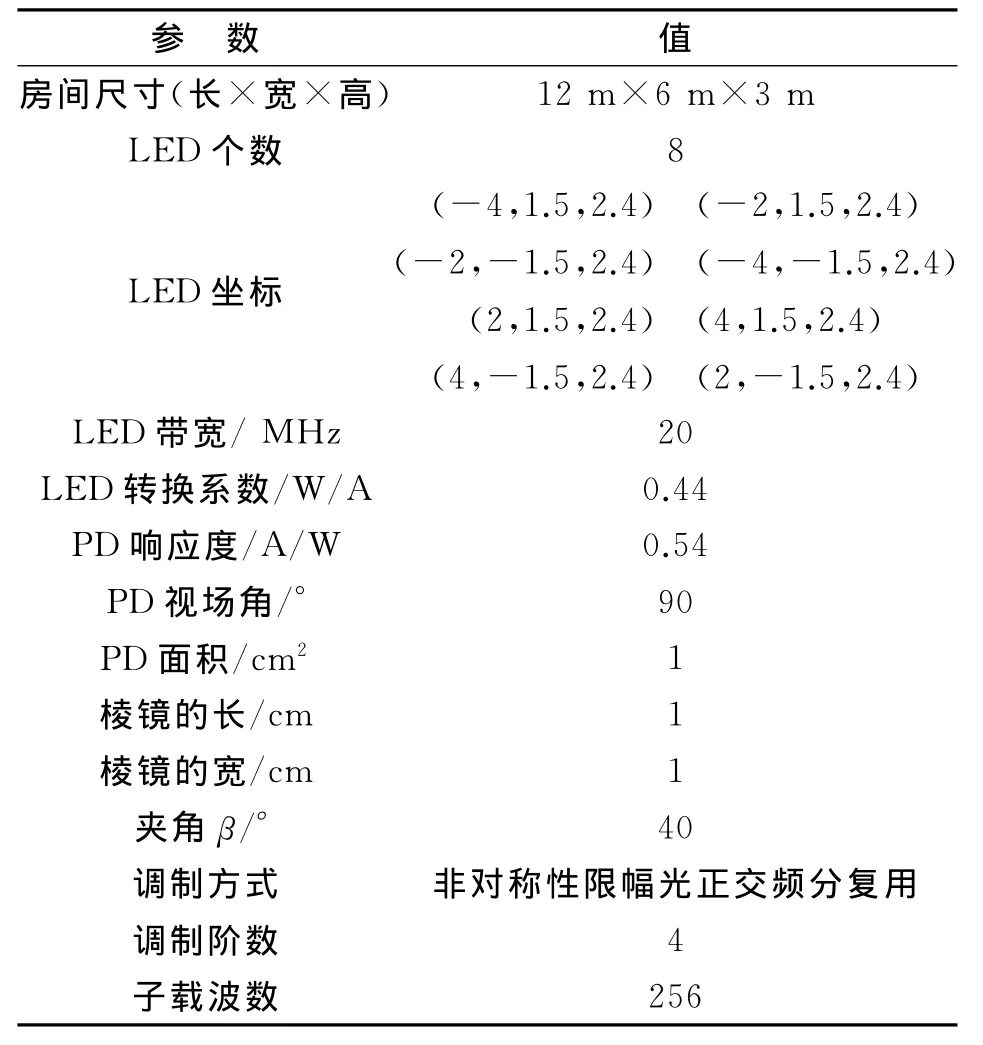
表1 多小区多用户VLC系统参数
2.1 干扰区优化
由1.2节的分析可知,干扰区面积的大小会对系统的性能产生很大的影响。图5所示为干扰区范围示意图,当LED垂直向下放置时,计算出LED所需的最小半功率角为69°,如图5(a)中阴影所示,干扰区的面积超过了整个小区面积的2/3。通过选择合适的LED半功率角,并倾斜LED,来减小干扰区的面积,LED的参数如表2所示。如图5(b)所示,干扰区的面积约为整个小区面积的1/6,用户在大多数情况下都处于非干扰区。
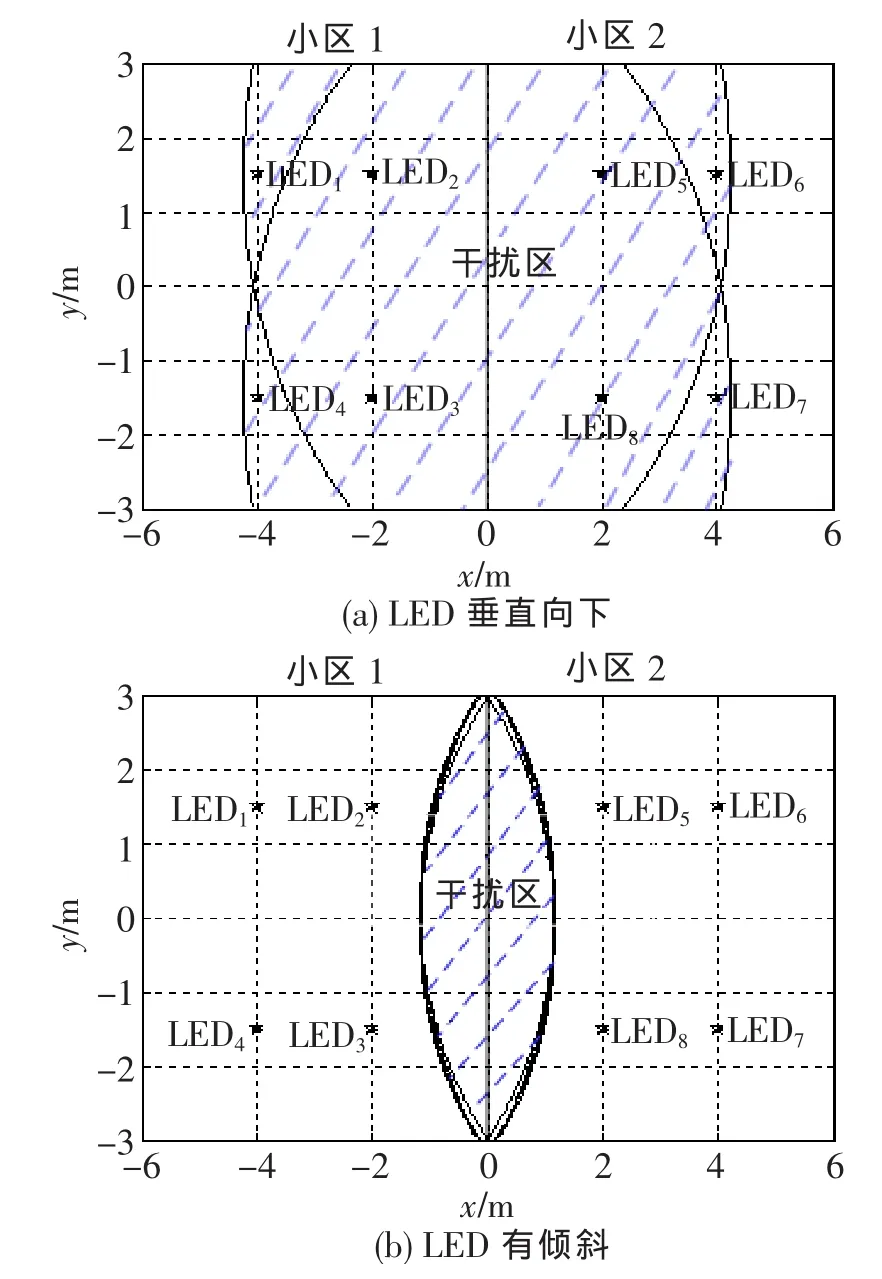
图5 干扰区范围示意图
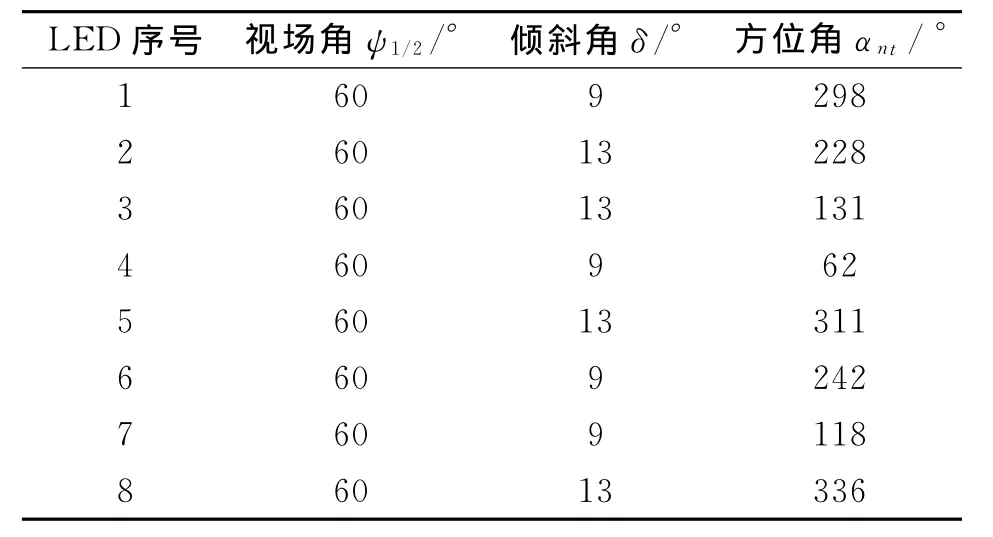
表2 LED配置参数

图6 不同接收机下两种小区划分的BER曲线
2.2 BER性能分析
首先,仿真了不同接收机下两种小区划分的BER曲线,如图6所示。用户4位于(1.0,0.5,0),LED半功率角为69°,垂直向下放置。图6(a)中使用空间分离接收机,PD数量为2,间距为3cm。图6(b)中使用基于棱镜阵列的非成像接收机,接收单元数量为2。由图6(a)可知,相比于动态小区划分方法,非动态小区中用户1和用户2的BER性能更优,但是用户4无法满足通信需求。由图6(b)可知,两种方法下用户的BER性能有一个明显的提升,但是对于非动态小区划分中的用户4,仍然会受到很强的小区间干扰,同样无法满足通信需求。综合以上两种情况,动态小区划分方法可以有效地消除小区间干扰的影响,同时,基于棱镜阵列的非成像接收机能显著降低信道相关性,提供更优的BER性能。
接下来,在使用基于棱镜阵列的非成像接收机的情况下,仿真了不同小区划分方法下的BER曲线,如图7所示。用户4位于(1.0,0.5,0),LED 半功率角为69°,垂直向下放置。实线使用的接收机有两个接收单元,虚线使用的接收机有8个接收单元。由图7(a)可知,使用PDS方法后,每个用户的BER性能都有不同程度的提高,尤其对于用户4,成功地消除了小区间干扰的影响,使其能够满足正常的通信需求。由图7(b)可知,通过使用PDS方法,明显地提高了系统的BER性能。
在对干扰区进行优化后,图8所示为信噪比为125dB时,两种方案下用户4的BER随接收位置变化的等高线图。位于干扰区时,非动态小区中用户4的BER性能差,由于其可激活的PD受到了限制。动态小区中用户4的BER性能更优,但它的计算复杂度更高。因为,动态小区联合BD编码要综合考虑4个用户,而非动态小区单独考虑每个小区中的用户,当每个用户可选择的PD个数一定时,MMSV方法选择激活PD组合的计算复杂度与用户数呈指数增长。因此,动态小区划分方法的高性能是以计算复杂度为代价的。在非干扰区时,两种方案的BER性能相同。

图7 不同小区划分方法下的BER曲线

图8 两种方案下用户4的BER随接收位置变化的等高线图
3 结束语
本文将基于棱镜阵列的非成像接收机应用于多小区多用户MIMO VLC系统。首先,将基于棱镜阵列的非成像接收机与空间分离接收机进行了比较,仿真结果表明,基于棱镜阵列的非成像接收机能够提供一个相关性很低的信道,实现更优的系统性能;接下来,使用PDS方法,成功地消除了非动态小区中小区间干扰的影响,对于动态小区,使用PDS方法能够显著地提高系统的性能;最后,通过改变LED的配置,优化了干扰区的面积。在此基础上,研究两种多小区方案的BER性能。仿真结果表明,在使用PDS方法后,两种方案都能够有效地消除小区间干扰的影响。当用户处于干扰区时,动态小区体现出了更优的BER性能,但其计算复杂度高。当用户都处于非干扰区时,两种方案的BER性能相同。
猜你喜欢
天水行政学院学报(2022年4期)2022-11-18
少儿美术(快乐历史地理)(2020年4期)2020-02-24
学苑创造·A版(2019年4期)2019-05-10
中国惯性技术学报(2019年6期)2019-03-04
电子制作(2019年24期)2019-02-23
电子制作(2018年19期)2018-11-14
中央民族大学学报(自然科学版)(2017年2期)2017-06-11
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24
火控雷达技术(2016年3期)2016-02-06
