
基于光强信息的室内平面图构建方法研究
2020-04-13 06:12束沁冬周泽仑史文华
苏州科技大学学报(自然科学版) 2020年1期
束沁冬, 戴 欢, 周泽仑, 史文华
(苏州科技大学 电子与信息工程学院,江苏 苏州 215009)
室内平面图是室内定位导航的重要支撑工具,如何快速、便捷地构建室内平面图已成为学术界和产业界的研究热点[1]。 在室内平面图构建方面,通常采用指纹定位和图像方法来构成平面图轨迹。 文献[2-3]提出SmartSLAM(Smart Simultaneous Localization and Mapping)方法,利用移动终端惯性传感器实现粗精度轨迹估计,采用WiFi 指纹定位算法矫正轨迹精度。 文献[4]优化WiFi 节点的拓扑分布结构,并对获得的粗精度轨迹采用WiFi 指纹定位算法矫正。 文献[5]利用对多传感器数据的处理,通过盲区边缘定位精度改进算法获得定位轨迹。 基于无线射频信号的室内平面图,不仅需要特定的设备和模型参数,而且需要耗费大量的人力去完成WiFi 节点布局和指纹库构建。 文献[6-7]通过视频图像处理技术实现室内平面图的重构。 文献[8-11]利用室内布局图像信息,将室内空间特征关系映射为室内路径信息,实现室内平面图的重构。 基于视频、图像方法构建的室内平面图虽然精度高,但是算法复杂度较高,设备要求高。
文献[12-13]提出利用四元数法对陀螺仪采样间隔内输出的角增量进行姿态解算,但是四元数法[14-15]面对高动态的载体问题时会产生严重的算法漂移现象。 随着智能移动终端的普及,利用智能移动终端的传感器设备构建室内平面图具有一定的研究意义。
笔者首先利用四子样旋转矢量算法[16]实现航向估计,对四元数法产生的不可交换误差进行适当补偿,并通过轨迹拐点自校准算法进一步提高航向精度,最后融合室内光强信息,获取行人在不同区域的PDR 轨迹,基于多条PDR 轨迹构建精确的室内平面图。
1 基于光强信息的行人航迹推算方法
如图1 所示,在室内环境中,有无光照的区域光强值区分明显。
利用室内光强信息, 笔者提出基于光强信息的行人航迹推算方法,如下式
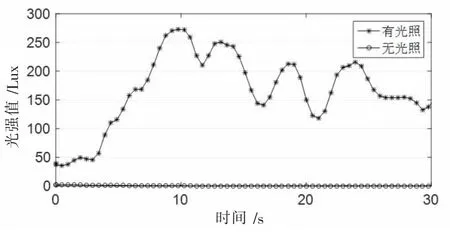
图1 室内有无光照下的光强信息

其中:SLi、θi分别表示第 i 步的步长和航向估计值,(X0,Y0)、(Xk+1,Yk+1)分别表示初始位置与第 k+1 步位置的坐标。 μ 表示基于光强信息的差异

其中:L 表示经过min-max 归一化处理后的光强值,Lthreshold表示所选取的光强阈值。
1.1 步频、步长估计
步频与步长通过加速度传感器数据获得,其中采用去除重力分量的三轴合加速度数据进行计算,避免智能移动终端朝向引起加速度传感器数值变化的影响。 实验表明,行走过程中的合加速度数据具有明显的周期性,并且波峰、波谷明显,因此,文中采用峰值检测法[17-18]实现步频的计算。 根据行人正常行走的频率范围1~2.5 Hz,定义迈步周期Tthreshold的取值区间范围为[0.4 s,1.0 s],按照波峰、波谷分布区间范围,自定义波峰Vthreshold取值区间,当合加速度数据相邻两波峰的峰值处于Vthreshold且时间间隔处于Tthreshold中时,记作一步,以此完成步频的计算。
对于步长估计,选取固定步长是常用的方法,但因行人行走频率、行走状态等因素的影响,行走过程中的步长是一组动态变化的数值。 为了获得更准确的步长估计,文中采用非线性模型动态估计方法[19]来估计步长,如下式

其中:SL 为计算的步长值,Amax、Amin分别表示一步周期中合加速度数据的最大、最小值表示一次行走过程中, 所有步频周期内合加速度数据最大值构成序列的平均值,K 为动态步长系数,a、b、c 分别为对多次行走过程中的合加速度数据训练得到的常量参数。
1.2 航向估计
在实际情况中,由于磁场不断变化,磁力计会出现严重的累计误差现象。 陀螺仪在短距离范围内,航向估计误差较小,且不受磁场变化的影响[20]。 文中通过基于磁场的姿态传感器获得初始航向,采用四子样旋转矢量更新四元数的方法来获得行走过程中的实时航向。
四元数Q 由1 个实数单位和3 个虚数单位x、y、z 组成的超复数,如下式

其中,q0、q1、q2、q3为标量,q 为矢量,利用四元数便可计算获得航向估计值 θ,如下式

为了补偿四元数中因有限转动引起的不可交换误差,公式(4)中Q 是通过对陀螺仪输出的角增量信息,文中采用四子样旋转矢量方法更新四元数,获得更准确的航向估计,如下式

其中,Q(tk+1)、Q(tk)分别表示 tk+1、tk时刻的四元数,h 为姿态更新周期,q(h)为姿态更新周期内载体坐标系的旋转四元数,如下式

其中,Φ 为等效旋转矢量,且Φ=|Φ|。 在姿态更新周期h 内对陀螺仪角增量进行四次采样(四子样)实时计算等效旋转矢量Φ,如下式

其中,Δθ1、Δθ2、Δθ3、Δθ4分别表示在[tk,tk+h/4]、[tk+h/4,tk+h/2]、[tk+h/2,tk+3h/4]、[tk+3h/4,tk+1]获得的角增量,α、β、γ、κ 为计算过程获得的系数。
行人在直线行走状态下,人体出现左右偏移的概率较小,而在拐弯状态下受惯性的影响,人体会出现明显的位置偏移。 文中通过采集陀螺仪数据,获取身体左右偏移信息,如图2 所示,陀螺仪数值波动范围较小表明行人处于行走状态,陀螺仪数值突变表明行人发生拐弯行为。

图2 陀螺仪拐点检测
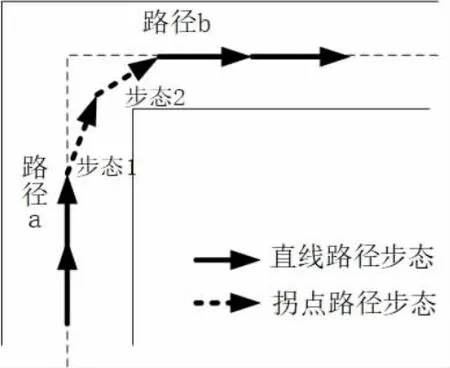
图3 拐点状态图
为了实现轨迹拐点自校准,文中利用步态间相关性匹配实现航向精度的提高。 对于人体因抖动产生的误差,在图3 的a、b 路径中,分别选取步态为2 的轨迹片段减小误差。 步态相关性匹配,如下式

其中,CorrM1、CorrM2分别表示拐点步态1、拐点步态2 与路径a、b 中步态(实线箭头片段)的相关性匹配结果,结果越大匹配度越高。 Sfx=(x1,{xa1,xa2,xb1,xb2})和 Sfy=(y2,{ya1,ya2,yb1,yb2})分别表示拐点步态 1 与路径 a、b中步态的x 轴、y 轴坐标组合。
在拐点步态相关性匹配结果中,选择匹配度最高的k 个步态S1,S2,…,Sk,并结合当前拐点步态S,通过下式提高航向精度

其中,θ1,θ2,…,θk分别表示步态 S1,S2,…,Sk的航向估计值,θg表示当前拐点步态的航向估计值,α1,α2,…,αk+1代表各航向估计值的权重,并且α1+α2+…+αk+1=1。 通过对每个航向赋予不同的权重,给相关性匹配结果高的步态航向赋予较高的权重,经过调整权重参数以获得准确度高的航向估计值θ。

图4 原始PDR 轨迹

图5 矫正后PDR 轨迹
如图4 所示,原始PDR 轨迹在直线与拐弯处精度较低,出现行人航迹推算中存在的“航向漂移”问题。如图5 所示,通过四子样旋转矢量和轨迹拐点自校准算法进行航向矫正,有效实现了航向精度的提高。
在实验中,默认走廊区域无光照,房间区域有光照。 按公式(1),构建基于光强信息的PDR 路径,构建结果如图 6(a)、(b)所示。 图 6(b)中实线区域内为走廊区域,虚线区域内为房间区域。
通过观察图6 发现,基于光强信息构建的室内平面图接近实际平面图(图6(c)),相似性较高。 但是由于室内光强数据连续性分布的特点,在房间与走廊连通区域产生了区分误差,使得原本属于房间区域的轨迹被划分为走廊区域,但总的区域区分误差不超过4%。

图6 构建的室内平面图与实际平面图对比
2 仿真实验
2.1 实验流程
实验场地为学校实验楼的一处室内区域,总面积约为600 m2,使用华为PLK-TL01H 智能手机进行传感器数据采集,采样频率为50 Hz。 在正常行走空间范围内,实验人员水平方向手持智能手机,完成单个房间内、两个房间之间、房间与走廊之间的路径的传感器数据采集工作,并记录轨迹的起始位置。
文中所提算法具体步骤如下:
Step1:采用基于四子样旋转矢量和轨迹拐点自校准的方法,获得精度高的室内PDR 轨迹;
Step2:根据室内光强信息差异,对室内PDR 轨迹实现区域区分,得到PDR 区域区分轨迹;
Step3:根据绘制的实际室内布局大小,将每条PDR 区域区分轨迹进行拉伸或压缩,使其大小与实际室内布局相匹配;
Step4:将大小匹配的PDR 区域区分轨迹,按照实验中标注的起始位置,在室内布局中找到相对位置,融合多条PDR 轨迹,完成室内平面图的构建。
2.2 实验误差评估
为验证基于四子样旋转矢量与轨迹拐点自校准算法对轨迹航向、距离等精度的影响,选取25 条实验轨迹进行分析,并分别与基于四元数的扩展卡尔曼滤波(EKF-四元数)、基于四元数的粒子滤波(PF-四元数)进行比较。
如图7、图8 所示,分别给出了轨迹航向误差累积分布函数图与轨迹距离误差累积分布函数图。 在轨迹航向与距离误差的评估中,基于EKF-四元数方法表现较差,文中所提基于四子样旋转矢量与轨迹自校准方法相对于另外两种方法表现更加优异。
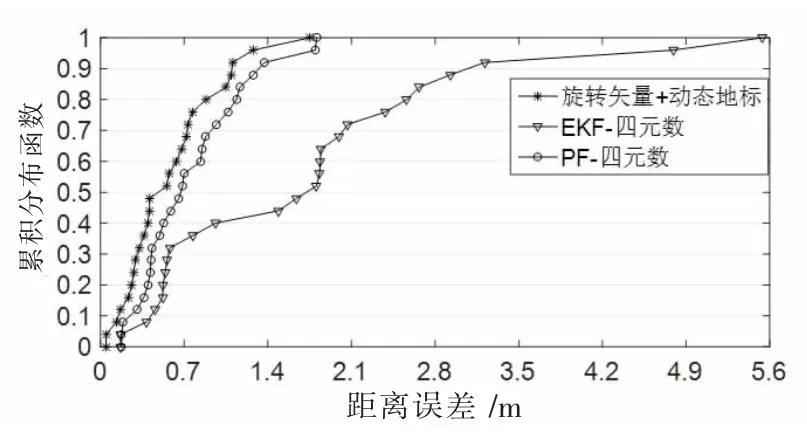
图7 轨迹航向估计误差

图8 轨迹距离误差
如图9 所示,给出了轨迹形状相似性累积分布函数图,通过对轨迹坐标点利用Corr2 函数得到的实验结果表明:文中所提方法,轨迹相似性结果大于0.98,更能准确反映室内的路径布局状态。 实验评估具体误差,见表1。

表1 实验评估误差
3 结语
文中提出基于光强信息的室内平面图构建方法。该方法采用四子样旋转矢量算法进行航估计,通过轨迹拐点自校准算法实现航向矫正,有效解决了PDR 中的“航向漂移”问题。 同时,利用室内区域中有无光照条件下的光强信息差异,实现了平面图的区域区分,提高了平面图的易用性。
文中暂未考虑平面图中同类型区域的划分,如多房间区域划分问题,在接下来的工作中,将研究对该问题的解决,并加入更多的室内特征点,构建更完善的室内平面图。

图9 轨迹形状相似
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
科技与创新(2021年24期)2022-01-03
当代水产(2021年2期)2021-03-29
鸭绿江·下半月(2020年2期)2020-04-07
鸭绿江·下半月(2020年1期)2020-03-23
汽车与新动力(2019年5期)2019-11-07
鸭绿江·下半月(2019年11期)2019-10-21
鸭绿江·下半月(2019年12期)2019-10-21
民用飞机设计与研究(2019年4期)2019-05-21
