
战术数据链航迹处理与态势信息质量评估
2020-04-10 08:47刘熹陈娟彭来献张磊田畅
指挥与控制学报 2020年1期
刘熹 陈娟 彭来献 张磊 田畅
1.陆军工程大学通信工程学院江苏南京210007
在多兵种联合作战中,态势感知与共享能力是获得“信息优势”和“决策优势”,进而形成“行动优势”的先决条件.通用战术数据链集导航、识别、监视、保密通信等多种功能于一身,能够将分布在数万平方公里范围内的传感器、作战平台和指挥控制单元铰链成一个整体,是支撑联合作战行动的重要系统.从作战应用的角度看,数据链系统的态势生成与共享能力是其区别于一般通信系统的重要特征,也是发挥武器装备作战效能、提升战斗力的根本保证[1-4].
1 战场态势一致与航迹统一
态势是战场感知能力所实现的最终结果,反映战场环境、战场力量部署、活动和意图的当前状态以及发展变化趋势.态势与真实战场的符合程度可以用态势信息质量来描述.战场态势一致则是指遂行同一作战任务的各参战单元,在协同计划和协同行动时,所面对的相关态势信息必须保持一致,包括对态势元素时空状态的感知、理解和预测保持一致.这是达成协同计划一致和协同行动同步的关键[5-6].
战术数据链服务于战术级指挥控制,能够利用电传感器或侦察手段获取的战术目标信息生成并在成员间共享共用战术图(Common Tactical Picture,CTP)[7].CTP 中的态势信息主体是各种战场监视传感器单元输出的目标航迹.理想的CTP 要求系统能够对监视范围内的每个战术目标生成唯一、连续、精确、实时和属性正确的航迹,并在所有成员间一致共享[8].本文把这一目标要求称为航迹统一.
航迹统一与态势一致的关系主要体现在以下几个方面:
1)航迹并不等同于态势.航迹实时地反映各种战术目标的属性和运动状态.态势不仅包括各种战术目标的航迹信息,也包括一些非航迹的态势要素,特别是通过综合分析航迹和其他情报得出的对兵力部署、行动意图的估计和理解,以及对发展趋势的预测等等.
2)航迹统一是实现态势一致的前提和基础.只有解决好航迹统一问题,也就是说在参与单元间共享高质量的航迹信息,才有可能一致地、正确地理解和预测形势.航迹统一是数据链必须实现的重要功能,而态势一致性问题本身已经超出了数据链功能域,需要上升到认知域由指挥控制和决策层面加以解决.
3)对态势的理解可以促进航迹统一.指挥人员对态势的研讨和理解结果应该反馈给数据链,促进航迹统一功能的实现,进一步提高态势信息质量.
4)航迹统一是绝对概念,而态势一致则是相对概念.航迹统一的绝对性体现在,理想状态下,态势图上呈现的航迹实体与物理空间的真实目标应是一一对应的,不同参与者之间指称同一条航迹时与真实目标的对应关系不应存在歧义.态势一致的相对性体现在,承担不同任务和角色的参与者看到的态势图不必完全相同,只要呈现的信息要素能够保证对战场情况的理解一致即可.
2 航迹统一实现技术
数据链系统一般采用集中式或分布式的航迹统一实现技术.
集中式航迹统一的信息处理框架中有融合中心,多个传感器的数据需要传输到融合中心进行集中处理,如图1所示.根据集中式航迹统一处理的数据源是雷达航迹还是原始量测,又可以分为航迹融合结构和点迹融合结构.
集中式航迹融合结构中,传感器平台具有一定的雷达数据处理能力,生成稳定的目标航迹后再向融合中心报告,参见图1(a).融合中心对不同来源的雷达航迹进行过滤、数据配准、航迹相关,最后将对应同一目标的多个航迹融合为一个航迹,一般来说融合后的航迹能够改善目标跟踪的精度和连续性.集中式点迹融合结构要求雷达直接将原始量测报告给融合中心,由融合中心对目标点迹数据进行过滤、数据配准、航迹起始,最后将点迹与航迹进行关联(数据关联),并采用滤波算法形成目标航迹,参见图1(b).
点迹融合结构在美国海军的协同作战能力(Cooperative Engagement Capability,CEC)系统中得到了成功运用,并且实践证明其生成的航迹质量更高[9-10].不过相比点迹融合结构,航迹融合结构对通信带宽和处理能力要求较低,并且与传感器系统松耦合便于实现.因此,实际应用中集中式航迹融合结构更为常见.
分布式的航迹统一技术最典型的应用是美军的Link-16,其采用了基于航迹质量的分布式航迹选优策略.航迹质量(Track Quality,TQ)是衡量目标位置精度的一个标量,由航迹的报告单元在建立本地航迹时确定.Link-16 规定当参与单元持有某一航迹的最佳TQ 时必须在其接口上持续发送该航迹数据,这一要求被称为报告责任.航迹统一功能框架如图2所示,本地传感器的数据经过数据配准、滤波、TQ 计算后形成本地航迹.从数据链接收的航迹经过数据配准后得到远端航迹,包括监视航迹和精确参与单元定位与识别(Precise Participant Location and Identification,PPLI)航迹.本地航迹和远端航迹经过航迹相关处理之后可判定相互之间的对应关系.航迹选优功能依据一定的规则确定报告责任,不与任何远端航迹关联的本地航迹由本单元承担航迹报告责任,与远端航迹关联的本地航迹则需要按照TQ值判断是否接替该航迹的报告责任.承担报告责任的本地航迹向网内报告航迹消息,剔除冗余航迹之后的航迹数据送往态势显示终端.航迹协调员负责监控航迹数据的交换过程,必要时发出相应的航迹操作指令.航迹协调员在航迹统一方面起着举足轻重的作用,必须为其建立独立的航迹协调网(一般为话音通信网),以便协同各报告责任单元解决航迹异常问题.
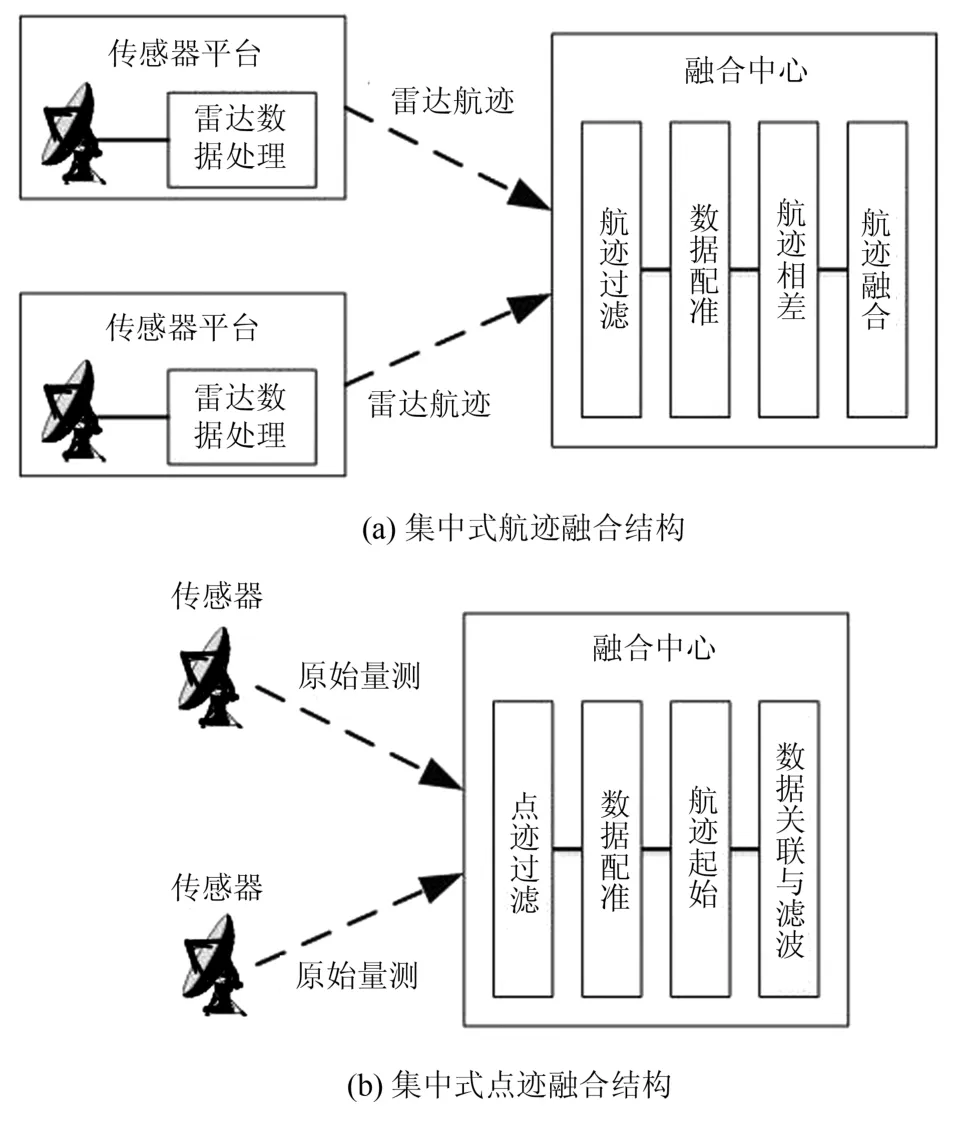
图1 集中式航迹统一功能框架
3 态势信息质量评估指标体系
指标体系是评估数据链系统的基础.美国军事运筹研究协会定义了尺度参数(Dimensional Parameter,DP)、性能指标(Measures of Performance,MOP)、效能指标(Measures of Effectiveness,MOE)和作战效能指标(Measures of Force Effectiveness,MOFE)4 个层次的指标来确定评估指标体系[11].其中,最低层次的DP 取决于系统部件本身的特性,而评估最高层次的MOFE 指标需要模拟具体作战样式下敌我双方兵力对抗过程.层次越高越接近系统使用者的视角,层次越低则越接近系统研发人员的视角.实际应用中,MOP 和MOE 这两个层次的评估更容易实现.
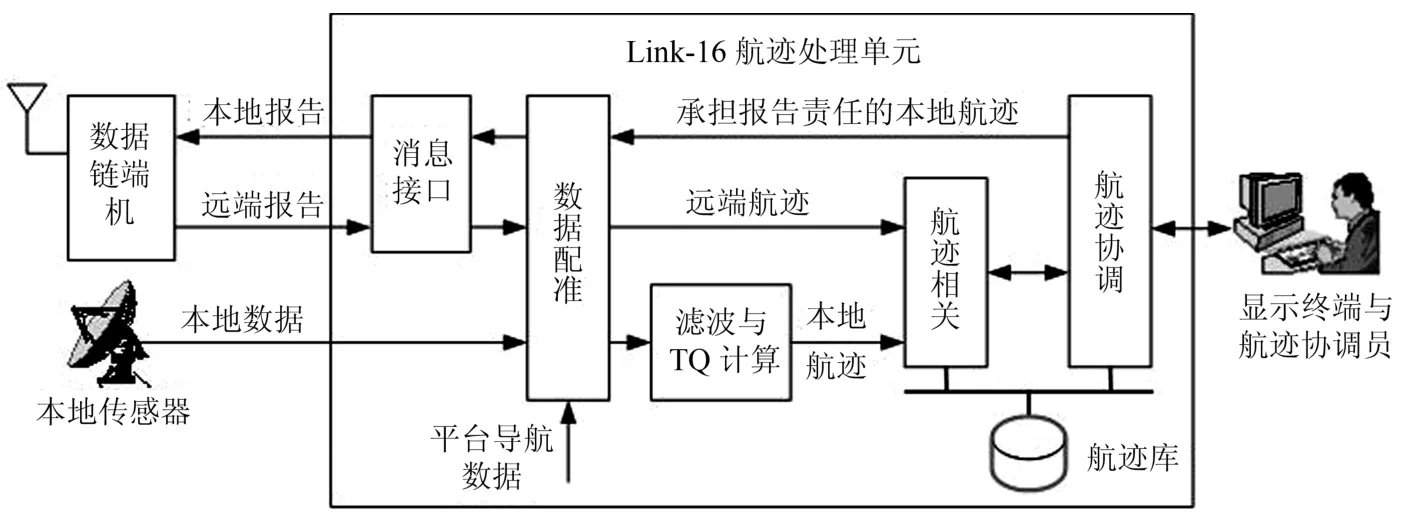
图2 分布式航迹统一功能框架
对于数据链系统而言,在MOP 层次可以将网络划分为雷达子系统、通信子系统、导航子系统、航迹处理功能等几个相对独立的部分分别定义性能指标,而在MOE 层次可以从态势信息质量和指挥协同效能两个方面来定义指标,参见图3.
美国防部非常重视Link-16 空情图质量的评估工作,单一综合空情图(Single Integrated Air Picture,SIAP)系统工程任务组针对这一问题提出了8 个属性指标:完整性、清晰性、连续性、一致性、状态精确性、标识完整性、标识正确性和标识清晰性.其中,前3 个来源于《战区防空与导弹防御顶层需求文档》,后3 个来源于《战斗标识顶层需求文档》.每个属性又可以分解为若干指标项.Blades 和Noyes 指出空情图属性指标的优点在于弥补了MOFE 和MOP之间的差距,每一项指标都是一组性能指标的综合结果,便于衡量复杂场景下的系统性能好坏[12].
赵宗贵等在分析战场感知诸环节作用的基础上,将战场感知信息质量分为信源报知信息质量(点迹质量)、融合目标信息质量(航迹质量)、态势信息质量(关系质量)3 个级别,并分别给出了每种信息质量评估的指标分解框架[13-19],参见图4.
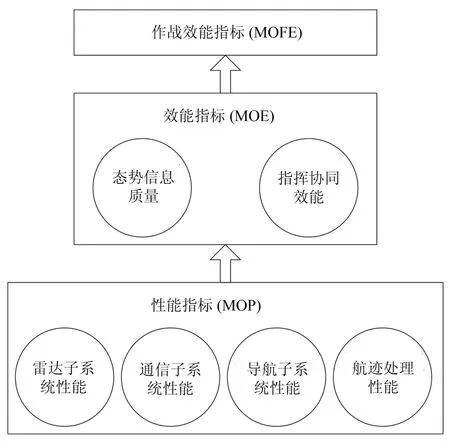
图3 评估指标的层次划分
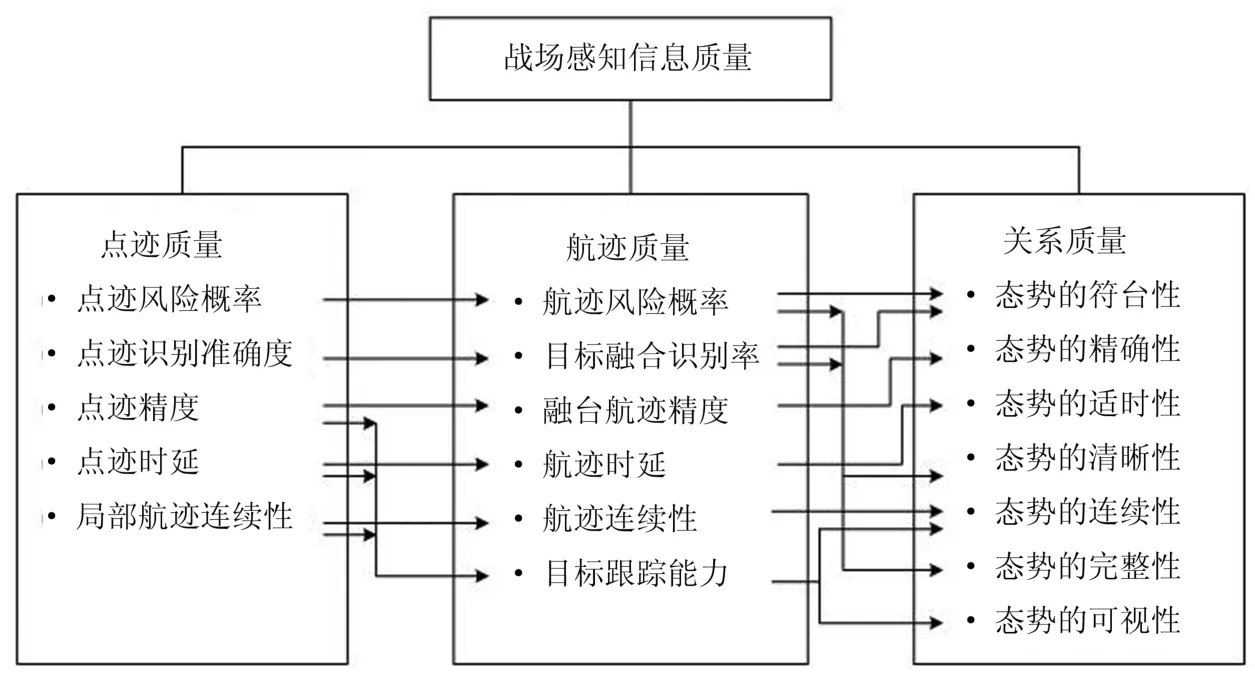
图4 战场感知信息质量分级与传递关系
为了适应战术数据链系统客观评估的需要,综合美军空情图属性和赵宗贵等提出的战场感知信息质量概念框架,提出数据链的态势信息质量概念[20-23].数据链态势信息质量是一个多维概念,可以定义为数据链系统生成的态势信息相对于数据链用户的适用性.数据链态势信息质量包含完整性、清晰性、连续性、一致性、准确性、及时性等6 个特征维,每个特征维又可以分解为若干量化指标.态势信息质量指标有以下3 个特点:
1)包含的态势要素是不完备的,主要针对构成数据链CTP 的各类动态目标的航迹信息质量加以评估,超出数据链航迹统一功能框架之外的其他态势要素和功能不在考虑之列,比如态势图的可视性指标、涉及态势估计和预测等指标均未列入.
2)指标具有客观性,也就是说,设计的指标必须是利用采集记录的航迹数据就能直接计算得到,而需要主观评测的指标不包括在内.
3)指标计算需要有真实数据,也就是说,需要已知目标的真实状态以及航迹与目标的对应关系才能计算指标,对于仿真系统来说这一点比较容易满足,而对于实兵演习场合则需要增加额外的真实数据记录采集设备.
3.1 态势信息质量指标分解框架
态势信息质量6 个特征维的指标分解框架如图5所示,6 个特征维又可以进一步分解为16 个3级指标.
3.2 完整性
完整性衡量态势信息中被跟踪、识别的目标所占的比例,当所有目标均被跟踪、识别时称为完整.指标进一步分解为跟踪完整率CTR和识别完整率CID.前者为实际跟踪的目标占全部目标的比例,后者反映被跟踪的目标中具有明确身份标识的所占比例.这些指标是雷达探测、目标身份识别能力的综合反映.
1)跟踪完整率
定义:被跟踪并报告的目标数与全部目标数的比值.
计算:
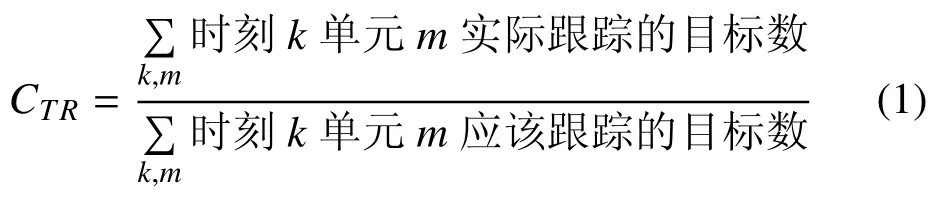
说明:CTR∈[0,1].实际跟踪的目标是指参与单元的航迹数据中至少有一条该目标的指派航迹.当某时刻参与单元处于非活动状态时,应该跟踪的目标数按0 计算.CTR指标可以按照目标身份类型(敌、我、中)以及环境类型(空中、水面)分别统计.
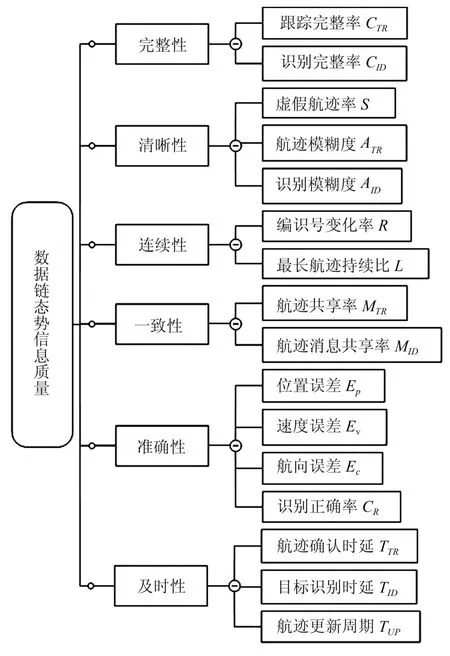
图5 态势信息质量指标分解框架
2)识别完整率
定义:被明确识别的目标数与全部目标数的比值.
计算:
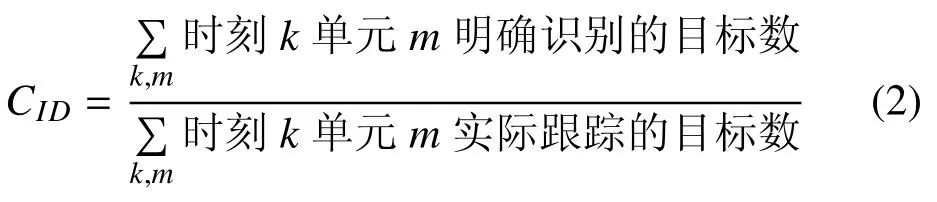
说明:CID∈[0,1].明确识别的目标是指其识别状态为除了无法识别之外的状态,包括正确识别、错误识别或者模糊识别.CID指标可以按照目标身份类型(敌、我、中)以及环境类型(空中、水面)分别统计.
3.3 清晰性
清晰性反映态势信息中所含虚假航迹、模糊航迹和模糊标识目标的程度,当不存在虚假航迹、模糊航迹和模糊标识目标时称为清晰.虚假航迹是指不能对应任何目标的航迹.模糊航迹则是指对应同一目标的多个指派航迹.模糊识别目标是指目标的所有指派航迹中至少有两个航迹,其中一个标识正确另一个标识错误.定义的指标包括虚假航迹率S、航迹模糊度ATR和识别模糊度AID.其中,虚假航迹率S是各传感器子系统虚警率的综合结果.航迹模糊度ATR反映了数据链系统中数据配准、航迹关联与协调功能的实现情况.识别模糊度AID体现了不同信息源身份识别信息的冲突情况.需要指出的是,身份标识正确的目标所占比例由准确性维度指标识别正确率CR加以定义.由于任意一个具有明确识别的目标识别状态属于正确、错误、模糊三者之一,因此,没有必要再为错误识别的目标定义指标.
1)虚假航迹率
定义:虚假航迹数与总航迹数的比值.
计算:
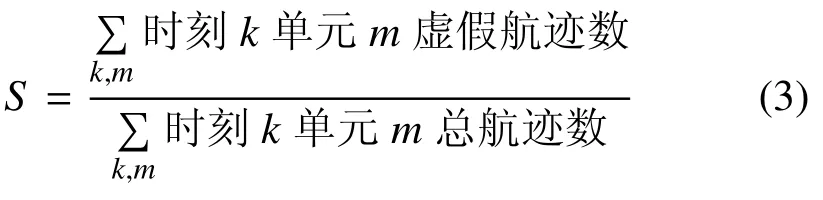
说明:S∈[0,1].该指标反映了虚假航迹出现的程度.
2)航迹模糊度
定义:所有指派航迹数与实际跟踪的目标数的比值.
计算:
说明:ATR≥1.该指标反映了多名航迹出现的程度.ATR指标可以按照目标身份类型(敌、我、中)以及环境类型(空中、水面)分别统计.
3)识别模糊度
定义:模糊识别目标数与全部目标数的比值.
计算:
说明:AID∈[0,1].该指标反映了不同情报来源引起目标身份识别冲突的程度.AID指标可以按照目标身份类型(敌、我、中)以及环境类型(空中、水面)分别统计.
3.4 连续性
连续性衡量维持目标编识号不变的持久程度.当分配给目标的航迹编号不改变时称为连续.具体指标分解为编识号变化率R和最长航迹持续比L,其中,编识号变化率R反映了目标编识号变化的频繁程度.最长航迹持续比L则反映了航迹的“破碎”程度.
1)编识号变化率
定义:单位时间目标编识号变化次数.
计算:
说明:R≥0,单位次/min.计算式中采用最小覆盖编识号数主要是考虑到一个目标可能有多个指派航迹.所谓最小覆盖编识号数是指能够覆盖目标整个跟踪期的最少指派航迹的个数,可用图6 加以解释.
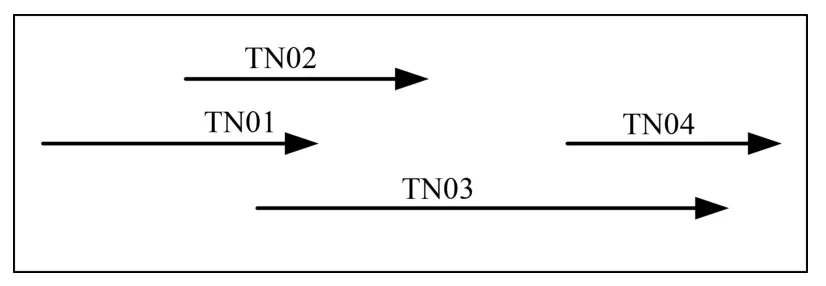
图6 最小覆盖编识号数目计算示例
图6 中,TN01~TN04 为同一目标的指派航迹,其中TN01、TN03 和TN04 可以完全覆盖目标的整个跟踪期,因此,最小覆盖编识号数为3.R指标反映了目标编识号变化的频繁程度,值越大说明编识号变化越频繁.该指标可以按照目标身份类型(敌、我、中)以及环境类型(空中、水面)分别统计.
2)最长航迹持续比
定义:最长的航迹持续时间与目标跟踪时间之比.
计算:
说明:L∈[0,1].L=1 表示每个目标都至少有一条覆盖整个跟踪期的指派航迹.L指标可以按照目标身份类型(敌、我、中)以及环境类型(空中、水面)分别统计.
3.5 一致性
一致性衡量参与单元间所共享航迹信息的相同程度.当每个参与单元的指定航迹具有相同的航迹信息时称为一致.具体定义了航迹共享率MTR和航迹消息共享率MTM两个指标.其中,航迹消息共享率MTM从网络传输能力的角度综合反映了航迹消息的成功传输率.
1)航迹共享率
定义:参与单元间共享的航迹数量与航迹总数的比值.
计算:
说明:MTR∈[0,1].共享航迹数是指所有参与单元共同持有的编识号不相同的指派航迹数.航迹总数是指至少有一个参与单元持有的编识号不相同的指派航迹数.当MTR=1 时,说明所有单元都持有全部指派航迹.MTR指标可以按照目标身份类型(敌、我、中)以及环境类型(空中、水面)分别统计.需要注意的是,数据链端机具有消息过滤功能,计算时要酌情考虑消息过滤规则对航迹数据统计的影响.
2)航迹消息共享率
定义:接收到航迹消息的单元数量比例的平均值.
计算:
说明:MTM∈[0,1].本指标反映了航迹消息在各单元间共享的一致程度,当MTM=1 时,说明所有报告的航迹消息在分发过程中均未丢失.MTM指标可以按照目标身份类型(敌、我、中)以及环境类型(空中、水面)分别统计.需要注意的是,数据链端机具有消息过滤功能,计算时要酌情考虑消息过滤规则对航迹消息统计的影响.
3.6 准确性
准确性衡量航迹位置、速度、航向和身份标识与真实情况的一致程度.当航迹位置、速度、航向和身份标识与目标真实情况一致时称为准确.具体的指标分为位置误差EP、速度误差EV、航向误差EC和识别正确率CR.这些指标都是定义在被跟踪目标的指派航迹集合上的平均或者综合值.
1)位置误差
定义:航迹估计位置相对于目标真实位置的均方根误差.
计算:
说明:EP≥0,单位m.k为数据采样时刻序号,m为参与单元序号,j为目标序号,n为给定采样时刻、单元和目标时的指派航迹序号.Δxn,j,m(tk)、Δyn,j,m(tk)和Δzn,j,m(tk)分别表示第k个数据采样时刻单元m中目标j的第n个指派航迹位置与目标位置3 个维度的差值.系数w∈{0,1},当高度数据不可用时w=0,否则w=1.Nj,m(tk)是第k个数据采样时刻单元m中目标j的指派航迹数量.EP指标可以按照目标身份类型(敌、我、中)以及环境类型(空中、水面)分别统计.
2)速度误差
定义:航迹速度相对于目标真实速度的均方根误差.
计算:
说明:EV≥0,单位m/s.速度为沿运动方向的地表投影速度.Δvn,j,m(tk)是第k个数据采样时刻单元m中目标j的第n个指派航迹速度与目标速度的差值.EV指标可以按照目标身份类型(敌、我、中)以及环境类型(空中、水面)分别统计.
3)航向误差
定义:航迹航向相对于目标真实航向的均方根误差.
计算:
说明:EC∈[0,180],单位度(°).Δcn,j,m(tk)是第k个数据采样时刻单元m中目标j的第n个指派航迹航向与目标航向的夹角.EC指标可以按照目标身份类型(敌、我、中)以及环境类型(空中、水面)分别统计.航向误差指标只对超过一定速度的目标航迹才有意义,例如可以要求速度大于20 km/s 时才计算该项指标.
4)识别正确率
定义:正确识别目标数与全部目标数的比值.
计算:
说明:CR∈[0,1].CR指标可以按照目标身份类型(敌、我、中)以及环境类型(空中、水面)分别进行统计.
3.7 及时性
及时性衡量发现目标、识别目标以及获得航迹数据的及时程度.定义了航迹确认时延TTR、目标识别时延TID和航迹更新周期TUP3 个指标.其中,航迹确认时延TTR反映系统发现目标的及时性,目标识别时延TID反映系统识别目标的及时性,航迹更新周期TUP传输反映系统更新航迹的及时性.
1)航迹确认时延
定义:从目标进入监视区域到首次报告航迹消息所经过的时间.
计算:

说明:TTR≥0,单位s.监视区域可以根据传感器的威力范围确定.首次航迹报告是指该目标所有指派航迹中最先发出的航迹消息.TTR指标可以按照目标身份类型(敌、我、中)以及环境类型(空中、水面)分别统计.
2)目标识别时延
定义:从首次航迹报告到目标被明确识别所经过的时间.
计算:
说明:TID≥0,单位s.目标被明确识别的时刻是该目标所有指派航迹中首次出现非“不明”身份标识的时刻.TID指标可以按照目标身份类型(敌、我、中)以及环境类型(空中、水面)分别统计.
3)航迹更新周期
定义:相邻两次报告同一航迹的平均时间间隔.
计算:
说明:TUP≥0,单位s.TUP指标可以按照目标身份类型(敌、我、中)以及环境类型(空中、水面)分别统计.
4 态势信息质量评估方法
图7 是数据链态势信息质量评估功能示意图.数据采集功能负责从装备收集记录数据,并进行预处理后保存到本地评估数据库.需求分析模块依据作战任务想定与评估需求,确定评估范围、内容和重点项目,选择评估指标,形成评估方案.指标计算模块从评估数据库中提取数据,进行分析、统计、计算,得到指标结果.最后由综合分析评价模块对网络规划方案进行综合评估,并给出方案优化建议,形成评估报告[24-26].综合分析评价的方法可以考虑依据图5所示的指标体系框架采用层次分析法(Analytic Hierarchy Process,AHP)来实现.对于一些不太合理的评估结果,可能需要结合装备试验的具体情况,分析和解释导致评估结果的深层次原因,适当调整评估指标或者计算方法,甚至修改评估方案进行重新评估.
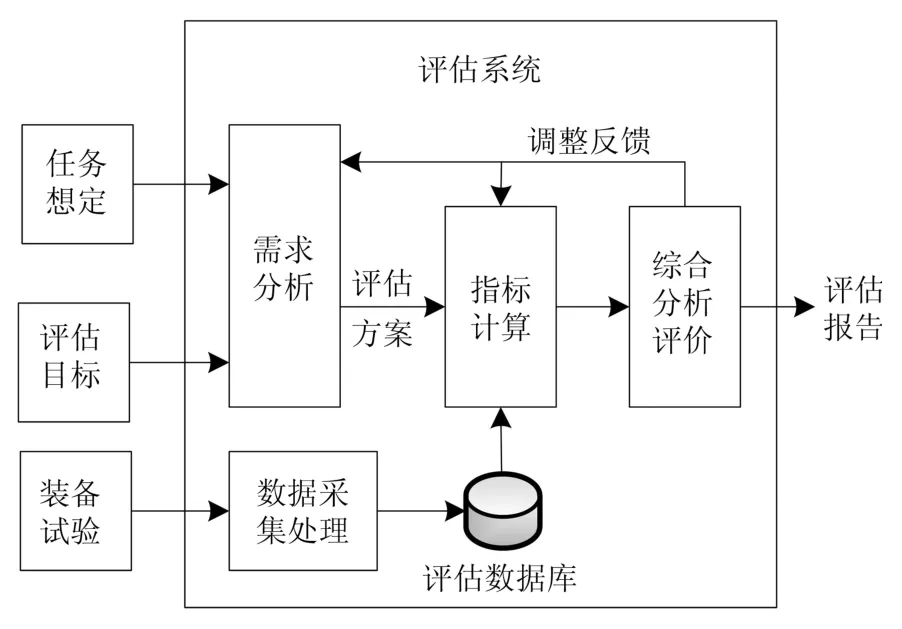
图7 评估系统功能示意图
5 结论
由于数据链系统本身是一个庞大而又复杂的信息系统,需要与传感器、武器平台和指挥控制系统结合,才能实现支撑一体化联合作战的使命任务.航迹统一是数据链生成战术态势图的目标要求,是实现态势一致,发挥系统作战效能的基础.随着数据链系统应用的逐渐成熟,对态势信息质量进行评估应该成为未来数据链装备在役考核的重要环节,以此为系统的软硬件改进升级提供客观依据.从近年来装备运用的情况看,航迹统一问题必须从技术和应用两个方面入手加以解决,在不断改进、完善相关技术的同时,应该进一步重视人在系统中的主导作用,规范相关人员职责,加强人员培训,通过技术与使用的完美组合实现数据链系统效能的最大化.
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
物流科技(2021年1期)2021-07-05
军民两用技术与产品(2021年10期)2021-03-16
雷达科学与技术(2020年4期)2020-09-11
北京航空航天大学学报(2019年9期)2019-10-26
当代陕西(2019年7期)2019-04-25
兵器知识(2018年9期)2018-09-18
电脑知识与技术(2017年17期)2017-07-14
