
基于物联网的水面无人艇技术体系和系统功能架构的研究
2020-04-09 04:33谢慧杨忠吴有龙顾娟
物联网技术 2020年3期
谢慧 杨忠 吴有龙 顾娟


摘 要:为了满足水面无人艇(USV)对军用、民用的任务需求,基于物联网技术提出了水面无人艇系统的五级技术体系架构模型,并对模型中各层功能结构进行详细讨论。分析了水面无人艇系统的功能需求,设计出水面无人艇系统功能框架图,提出加强基本功能系统的通用化和标准化研发,为用户提供多样性应用。最后指出了基于物联网技术的水面无人艇技术存在的风险,为水面无人艇统一系统架构的设计提供参考。
关键词:物联网;水面无人艇;技术体系;功能架构;RFID;5G
中图分类号:TP39 文献标识码:A 文章编号:2095-1302(2020)03-00-03
0 引 言
水面无人艇(Unmanned Surface Vehicle,USV)作为一种智能化、无人化水面平台,既可用在情报收集、监视侦察、海事巡航、岛礁测绘等方面,提高我国海上作战能力[1-4],也可用在水体监测、预警救灾、智能航运等方面[5-7]。一方面,USV功能和应用范围在不断拓宽,对物联网、通信技术等方面的要求越来越高[8];另一方面,物联网技术的迅速发展也促进了USV在军事、民用领域的应用。
文献[9-10]对USV的发展现状和应用进行了分析,对无人艇的基本技术特点进行了总结,提出了无人艇应向着智能化、标准化方向发展;文献[11]设计了基于物联网的USV智能航行控制系统,实现了无人艇远程控制和监测等功能。尽管国内无人艇的研究进展迅速,但仍然存在问题:目前USV类别多样,承担的任务不同,缺乏统一系统架构,不符合未来USV的发展趋势[12]。本文提出了基于物联网的水面无人艇五级技术体系架构和系统功能框架,为USV统一系统架构提供参考。
1 系统结构部署
基于物联网的USV技术体系架构如图1所示,共分为五层:感知层、网络层、数据层、应用层和用户层。每层之间和层内部的数据传输和处理都要遵守标准规范体系,同时为了保证系统运行的可靠性和安全性,要有統一完善的安全保障体系[13]。
1.1 感知层
感知层主要由RFID、传感器、气象测量仪、流速测量仪、水深测量仪、雷达等感知设备提取水域信息、地理信息、气象信息、水质信息、系统自身运行状态等,并将采集到的基础信息上传至网络层。
1.2 网络层
网络层包括互联网、微波通信、卫星通信、GPRS、4G、5G [14]等,通过网络层接收感知层传来的信息,甚至多个USV进行协同任务时,相互之间可以实现联网。我国在5G技术方面已经取得了国际领先地位,5G通信技术在传输速率、网络覆盖性等方面优势明显,必将为USV技术的发展提供良好契机。
1.3 数据层
数据层主要用以收集、汇总从感知层和网络层传来的各类位置信息数据、气象数据、水深数据、水质数据等,为应用层提供数据支撑,并对数据库进行大数据分析、同构化处理,将处理的结果通过应用层提供给用户层。对感知层的异常数据进行处理,如对特定区域的非法入侵船只和USV进行识别和报警。
1.4 应用层
应用层主要通过数据层传来的数据启动各种应用系统,包括系统的集成和远程控制平台,用于将各类USV的预警监测、警戒巡逻、情报侦察等应用服务信息进行整合集成,实现信息共享和无人艇集群的协同配合,根据所处情势的紧急级别和任务的优先级别自主确定应采取的措施,如避障、待命、返回等,替代操作人员。
1.5 用户层
用户层主要是通过电脑、手机等设备,根据用户需求将应用层的结果推送给目标用户完成相应操作。操作人员可以通过该层对USV的状态进行监测,实现火力控制、回收布放、设备维修等操作。
2 无人艇系统功能框架
2.1 功能需求分析
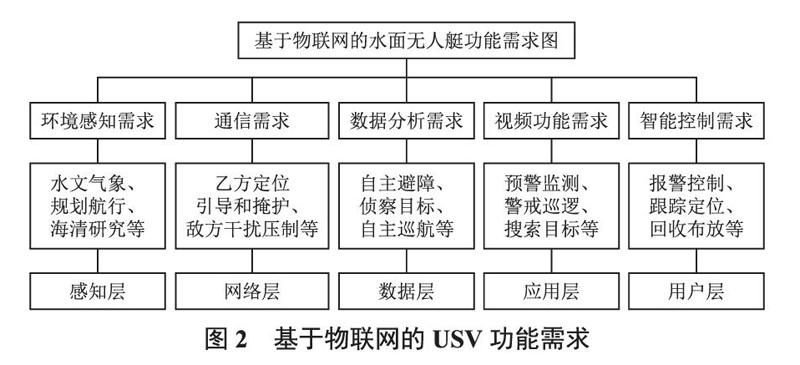
基于物联网的USV功能需求如图2所示。
(1)环境感知需求
USV的感知层配备多种传感器,可以探测外部环境,有效执行气象调查、水质调差、海情研究等多种民用和军事任务,特别是获取边防岛屿和邻国边界附近的水域信息较为复杂,利用环境感知来测量水文气象信息和规划航行线路尤为重要。在水域航行时,无人艇会受恶劣天气和风浪的影响,艇体颠簸的情况下执行跟踪、巡逻、避障等任务变得更加困难,需要对感知层多种信息进行融合处理,利用环境感知技术完成任务。
(2)通信需求
无人艇可在海上作战时担任网络信息平台,为用户层提供通信信息,配合导航系统对特定目标进行定位跟踪,根据母舰收到的威胁信号,装载相应的通信设施,传输实时信号至母舰,为己方的飞机、无人机、船只、母舰等提供定位引导和掩护,同时可以压制敌方通信信号,或者发出信号干扰敌方的判断。
(3)数据分析功能需求
USV根据预设值或自主算出的指令,对当前位置信息、运行状态进行综合判断,实现自主避障和自主巡航。从感知层传出的数据显示航线上有障碍物或者水深较浅时,无人艇改变航线,自主避障,以保证航行的安全。在执行侦察任务时,对侦察数据进行初级处理,并将结果传给用户层,用户层根据目标的位置变化指挥无人艇编队变更路线方向和侦察目标。
(4)视频功能需求
无人艇根据感知层的传感器和摄像机对目标进行识别和监控,通过上传的视频观察、分析、筛选、锁定目标,最终对目标实现搜索和追踪,为应用层提供支撑信息,可应用到预警监测、警戒巡逻等海警执法中。无人艇可以移动完成监控任务,将核电站、水电站、跨海大桥等重要区域拍摄的视频信息及时传输到总控台,克服了摄像头安装位置固定,镜头容易被破坏的风险,无人艇在海上巡航时,如果拍摄到可疑人员和不明物体时,用户层根据视频对无人艇做出指示,使无人艇逃离或者继续跟进拍摄更清晰的视频,便于在执法过程中更加智能可靠地采取行动。
(5)智能控制需求
无人艇有多种雷达、通信、环境采集模块,根据预先设定好的航线航速,可以将无人艇卸载到指定区域,同样也可以设置好回收布放的路径,在无人艇检测到闯入的不明威胁信号之后,立即向用户层发送报警信息,同时可以智能控制无人艇,对目标实施跟踪定位,对不法分子进行政策性喊话,对违法犯罪行为实施武力打击,实现海上安全管理。
2.2 系统功能框架
结合USV系统的功能需求,为确保各类功能的实施应用,如图3所示,可将USV系统功能框架分为基本功能系统和实用功能系统。基本功能系统是为了保证USV安全航行和应用的基本功能所开发设计的系统,包括控制系统、导航定位系统、通信系统、视频监控系统、能源驱动系统、测距避碰系统等。实用功能系统是根据军用、民用范围内常见应用设计的系统,包括水质检测、水域监测、智能救援、自主灭火、武力打击等系统。
2.2.1 基本功能系统
(1)控制系统
控制系统是USV的核心系统,是无人艇的“大脑”,为了实现各功能需求,各传感器感知外部环境、接收数据并分析后传递给控制系统,控制系统的性能关系到整个无人艇系统的可靠性,目前应用较多的控制器有PLC、单片机等。
(2)导航定位系统
导航定位系统具有使用精度高、性能好、定位快等特点,可以为USV提供行驶方向、航行速度、实时定位等信息,更快、更准确地获取无人艇的实时位置,为无人艇的安全性能提供保障。
(3)通信系统
USV在水上执行任务时,需要与基站通信,通过各类传感器和有线、无线网络实现各无人艇与基站间的信息交换。但是目前没有统一的通信协议,建立规范的通信协议有助于无人艇的兼容协作。随着物联网技术的迅速发展,音频、视频等格式的数据通信需求越来越大,在5G技术、云计算、大数据研究应用的背景下,无人艇的智能化程度会越來越高。
(4)视频监控
通过摄像头、发射机和接收机完成视频的实时监测和采集工作,并完成视频实时图传。夜晚或者无人艇行驶到光线暗的区域时拍摄的视频不清晰,就需要安装具有红外补光功能的摄像头,同时存储拍摄的视频,以供管理人员回看。
(5)能源驱动
能源驱动系统为USV提供航行的动力,对航行时间和续航能力有较高要求,随着环境污染的加重,绿色能源的发展潜力被关注,海上有足够多的风能、波浪能和太阳能,获取稳定和持续的能源动力才能保证无人艇用电系统的可靠。
(6)测距避碰系统
USV在自主航行过程中保持一定的安全距离和避开障碍物尤为重要,需要靠自身来感知障碍,通过测距避碰系统快速测量出障碍物的位置、距离和移动方向,将光学、声学等多种避碰方式有效结合以克服盲区,为无人艇的智能航行提供安全保障。
2.2.2 实用功能系统
实用功能系统主要是针对特定功能开发出的系统,用来增强USV功能的多样性,满足用户的多样化需求。某些区域较为偏远、环境恶劣,不适合人工监控和检测,或者人为执行任务会存在安全风险,USV 可以高效、零人员伤亡地代替执行任务。把USV、物联网技术和基本功能系统相结合,设计出无人艇水质检测、水域监测、智能救援、自主灭火、武力打击等实用功能系统,因此加强基本功能系统的通用化和标准化技术研发以降低实用功能系统的研发成本,更好地为用户提供多元应用。根据无人艇的应用可划分不同的功能系统,通过各功能系统来完成无人艇的各项应用,确保系统性能可靠稳定,使无人艇的使用效率和效果得到显著提高。
3 新技术存在的风险
物联网技术的发展使得万物互联成为可能,加快实现了USV的智能化,但也存在一定的安全隐患。
(1)感知层设备可靠性
感知层数据信息是整个物联网的基础,直接影响应用层和用户层的应用和决策部署。USV执行任务时经常面临恶劣、不可控的环境,传感终端的损坏会直接导致物联网信息失控。
(2)网络的安全问题
USV的传感器节点需要部署在无人实时看守的环境中,导致物联网更容易受到网络攻击,除了一般的信息泄露、篡改数据等风险之外,还面临传感节点信息被攻击者截获从而控制网络,对无人艇的功能加以利用的威胁。
(3)数据传输与处理故障
物联网中感知层的传感节点数量大、种类多。在通过网络层传输到数据层时,容易造成网络堵塞,数据层处理数据的能力不足,导致系统的智能性受到影响。
(4)云计算等技术的渗透
云计算等现代信息技术的发展加速了物联网的进程,但是数据可能会被云服务巨头公司独占,对无人艇的军用、民用方面功能加以干预或者泄露相关信息,存在一定的安全隐患。
4 结 语
随着物联网技术的不断发展,以及USV在军用、民用方面的迫切需求,USV各项功能系统的研究得到了广泛关注。本文介绍了基于物联网的USV系统结构部署,分析了USV的功能需求,以需求为牵引,归纳出无人艇系统功能框架,提出加强基本功能系统的通用化和标准化研发,降低研发成本,为用户提供多样性应用,最后提出新技术存在的风险,为USV统一系统架构提供参考。
参 考 文 献
[1]陈霄,刘忠,罗亚松,等.海洋环境下欠驱动无人艇航迹跟踪控制算法[J].哈尔滨工业大学学报,2018,50(10):110-117.
[2] FU M Y,WANG D S,WANG C L. Formation control for water-jet USV based on bio-inspired method [J]. China ocean engineering,2018,32(1):117-122.
[3] LV Z C,ZHANG J,JIN J C,et al. Energy consumption research of mobile data collection protocol for underwater nodes using an USV [J]. Sensors,2018,18(4):1211.
[4]钟雨轩,葛磊,张鑫,等.无人水面艇岛礁海域完全遍历路径规划[J].上海大学学报(自然科学版),2017,23(1):17-26.
[5]苗润龙,庞硕,姜大鹏,等.海洋自主航行器多海湾区域完全遍历路径规划[J].测绘学报,2019,48(2):256-264.
[6] LIANG J,ZHANG J,MA Y,et al. Derivation of bathymetry from high resolution optical satellite imagery and USV sounding data [J]. Marine geodesy,2017,40(6):466-479.
[7]严新平,柳晨光.智能航运系统的发展现状与趋势[J].智能系统学报,2016,11(6):807-817.
[8]马天宇,杨松林,王涛涛,等.多USV协同系统研究现状与发展概述[J].舰船科学技术,2014,36(6):7-13.
[9]柳晨光,初秀民,吴青,等.USV发展现状及展望[J].中国造船,2014,55(4):194-205.
[10]王石,张建强,杨舒卉,等.国内外无人艇发展现状及典型作战应用研究[J].火力与指挥控制,2019,44(2):11-15.
[11]乔大雷,侯娇,薛锋.基于物联网技术的无人船智能航行控制系统设计与实现[J].舰船科学技术,2017,39(23):149-152.
[12]张波,王磊,李英军.无人艇的发展趋势[J].科技视界,2016
(19):301.
[13]王晓芳,张艳.现代海上船联网标准体系框及体系表研究[J].舰船科学技术,2017,39(6):147-149.
[14]王健,罗潇,刘旌扬,等.复合动力超长续航无人艇系统的设计与实现[J].船舶工程,2017,39(5):48-52.
猜你喜欢
党的生活(黑龙江)(2022年4期)2022-04-25
小哥白尼(军事科学)(2019年2期)2019-04-17
通信世界(2018年27期)2018-10-16
岷峨诗稿(2017年4期)2017-04-20
新高考(英语进阶)(2017年12期)2017-02-26
商用汽车(2016年11期)2016-12-19
商用汽车(2016年6期)2016-06-29
商用汽车(2016年4期)2016-05-09
风能(2015年10期)2015-02-27
创业家(2015年5期)2015-02-27
