基于非单调Lyapunov函数的区间二型控制器设计
2020-04-09 02:51:42周绍生
杭州电子科技大学学报(自然科学版) 2020年1期
张 君,周绍生
(杭州电子科技大学自动化学院,浙江 杭州 310018)
0 引 言
区间二型模糊系统不仅提高了系统处理参数不确定性的能力而且简化了计算,得到越来越多学者的关注。目前,对于区间二型模糊系统的研究主要集中在降低结果的保守性上。使用传统的二次型Lyapunov函数得到的结果具有很大保守性,文献[1]利用模糊Lyapunov函数的方法使系统的保守性得到显著改善。文献[2]针对一类模糊系统的镇定问题,首次采用k步差分的方法来降低结果的保守性。文献[3]采用non-PDC方法对系统的H∞性能进行分析,虽然增加了控制器设计的灵活性,但是也增加了系统的保守性。考虑系统中不确定性足迹信息对系统稳定性分析的影响,文献[4]研究了一类具有前件不匹配的区间二型模糊系统的控制器设计问题。文献[5]通过引入辅助矩阵来降低控制器设计的保守性,对系统的状态和输出反馈进行研究。文献[6]采用非单调Lyapunov函数的方法对一型离散模糊系统进行稳定性分析和控制器设计,但是没有考虑系统的不确定性。文献[7]通过构建非二次Lyapunov函数,使用non-PDC方法进行控制器设计,一定程度上降低了控制器设计的保守性。本文考虑模糊系统中的不确定性,将非单调Lyapunov函数方法应用到区间二型模糊系统中,并使用两步差分法对系统稳定性进行分析,以线性矩阵不等式的形式给出满足闭环系统稳定的充分条件。
1 系统描述
考虑具有不确定性的区间二型离散T-S模糊系统,其IF-THEN规则描述形式如下:

x(k+1)=(Ai+ΔAi)x(k)+(Bi+ΔBi)u(k)
(1)
具有不确定性的区间二型离散T-S模糊系统描述为:
(2)

(3)
式中,H,E1i,E2i为已知合适维数的矩阵,F(k)∈Rn为未知的非线性时变矩阵且满足F(k)F(k)T≤I。
使用平行分布补偿方法设计状态反馈控制器,其IF-THEN控制规则描述为:

u(k)=Kjx(k)
(4)
式中,Kj∈Rm×n为第j(j=1,2,…,s)个控制规则的反馈增益,故系统的控制规则表述为:
(5)

[Ac(k)+HF(k)Ec(k)]x(k)=
Acl(k)x(k)
(6)



那么系统在原点是全局渐近稳定的。
2 主要结果
利用非单调Lyapunov函数方法,给出区间二型T-S模糊系统(6)状态反馈控制存在的充分条件。
定理考虑闭环系统(6),使系统全局渐近稳定的充分条件是:对于给定标量ε1>0,ε2>0,且对于任意i,j,g,l∈{1,2,…,s},存在正定矩阵P和Pijgl,矩阵G,Nj和Nl,满足下列不等式成立:
(7)
其中:
证明选择如下Lyapunov函数:
(8)


(9)

(10)
为保证闭环模糊系统(6)全局渐近稳定,则需满足下列不等式成立:
(11)
(12)
将式(3)、式(6)分别代入式(11)、式(12),可得:
(13)
(14)
由式(6)可知:Ac(k)=A(k)+B(k)K(k),Ec(k)=E1(k)+E2(k)K(k),对式(13)、式(14)进行化简可得:
(15)
(16)

(17)
(18)
因此,若不等式(7)成立,则有Δ2V(x)<0,由此进一步得出闭环模糊系统(6)是全局渐近稳定的。证毕。
3 数值实例
例1当s=2时,系统(6)中各参数矩阵的选择如下:
ε1=0.900,ε2=1.000。
区间二型隶属函数的表达式如下:
根据定理中的稳定性条件对LMI进行求解,得到可行解:
给定仿真参数的初始值:x1(0)=-0.5,x2(0)=0.6,闭环状态响应仿真结果如图1所示。
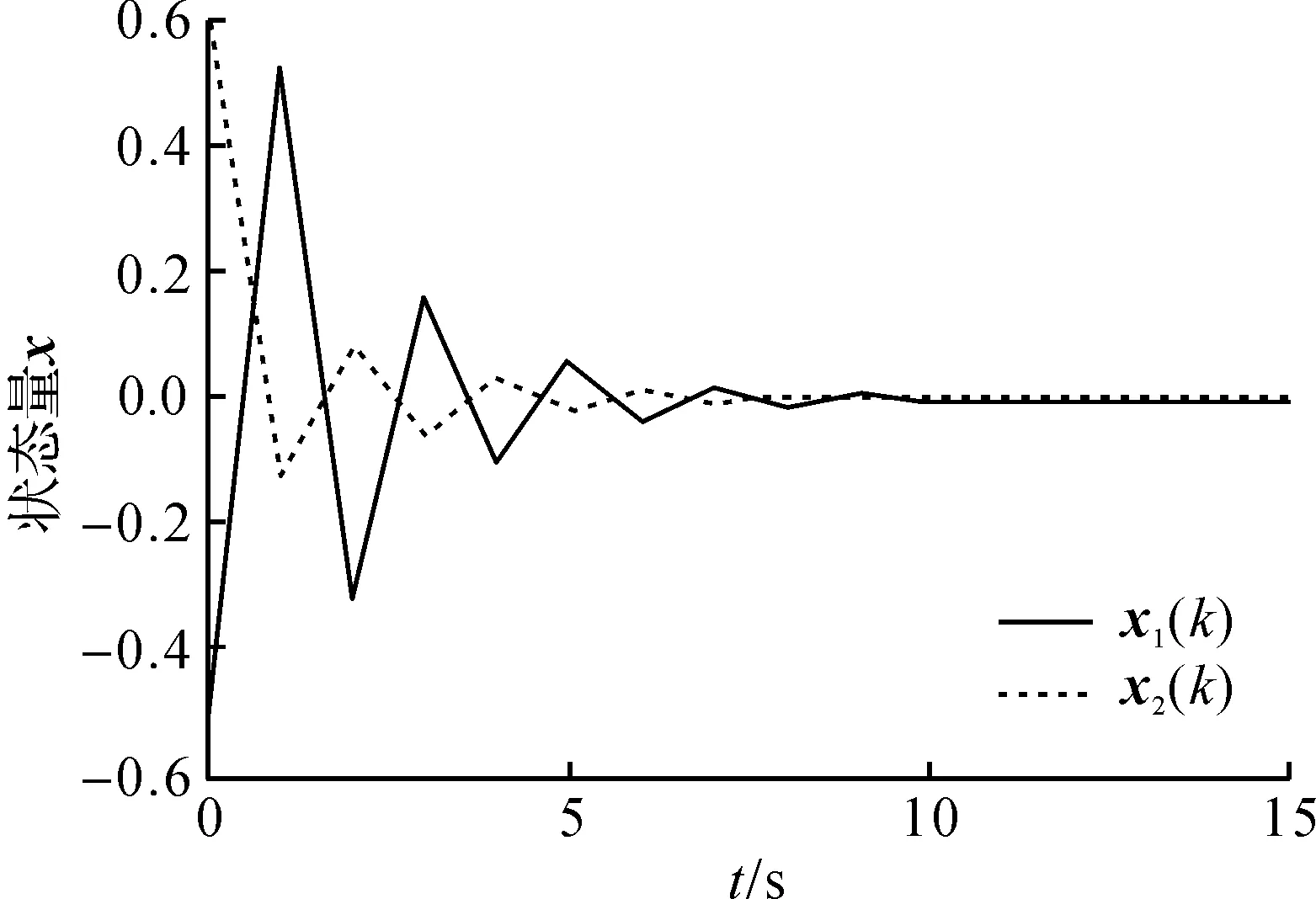
图1 闭环系统状态响应轨线
由图1可以看出:相同初始条件下,在控制器的作用下,随着时间t的增加,闭环系统的状态响应逐渐趋近于0,因此,闭环系统是全局渐近稳定的。
例2系统矩阵选取如下:
a和b用于表示稳定可行区域的可变元素,且-2.0≤a≤0,0.5≤b≤2.0。利用MATLAB中LMI工具箱对定理和文献[7]中的稳定性区域进行求解,本文采用两步差分方法和文献[7]采用非二次方法的可行域比较结果如图2所示。
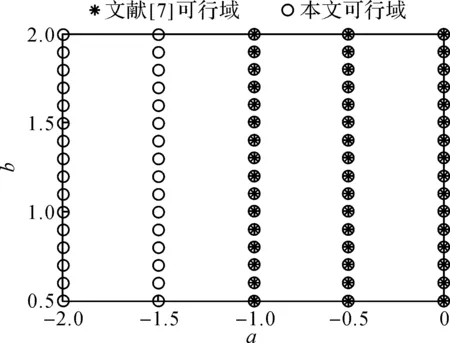
图2 文献[7]与本文可行域对比结果
由图2可以看出:本文采用的两步差分的方法相较于文献[7]中采用单步的非二次方法的可行域更大,所以,两步差分的方法在一定程度上增加了系统稳定时的可行域范围,有效降低系统的保守性。
4 结束语
本文针对区间二型离散T-S模糊控制系统,考虑系统中结构不确定性的因素,给出具有不确定性的区间二型离散T-S模糊系统在控制器作用下渐进稳定的充分条件,为区间二型T-S模糊系统的稳定性分析和控制器设计提供新的思路。后续将对系统H2性能等问题进行相关研究。
猜你喜欢
中学数学研究(广东)(2023年9期)2023-06-03 03:32:40
中学生数理化·八年级物理人教版(2022年9期)2022-10-24 07:03:48
法律方法(2022年2期)2022-10-20 06:41:56
中国外汇(2019年7期)2019-07-13 05:45:04
黑龙江电力(2017年1期)2017-05-17 04:25:05
环境科技(2016年5期)2016-11-10 02:42:12
系统工程与电子技术(2016年4期)2016-08-24 07:46:22
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27 06:31:48
系统工程学报(2015年2期)2015-02-28 19:53:43
电网与清洁能源(2015年2期)2015-02-28 16:03:12