
某机器人框架加强方案的静力及模态分析
2020-04-07 03:44王富刚张广涛
科学大众 2020年1期
王富刚 张广涛


摘 要:机器人框架是机器人外部设备的支撑,决定了机器人的稳定性。因此在预研阶段对框架的力学性能分析尤为重要。文章利用Abaqus进行计算,一方面进行模态分析,另一方面分析模型静力,校核是否满足强度要求。通过对比两种加固方案,最终确定框架方案。
关键词:机器人;模态分析;静力分析;框架
1 模型介绍
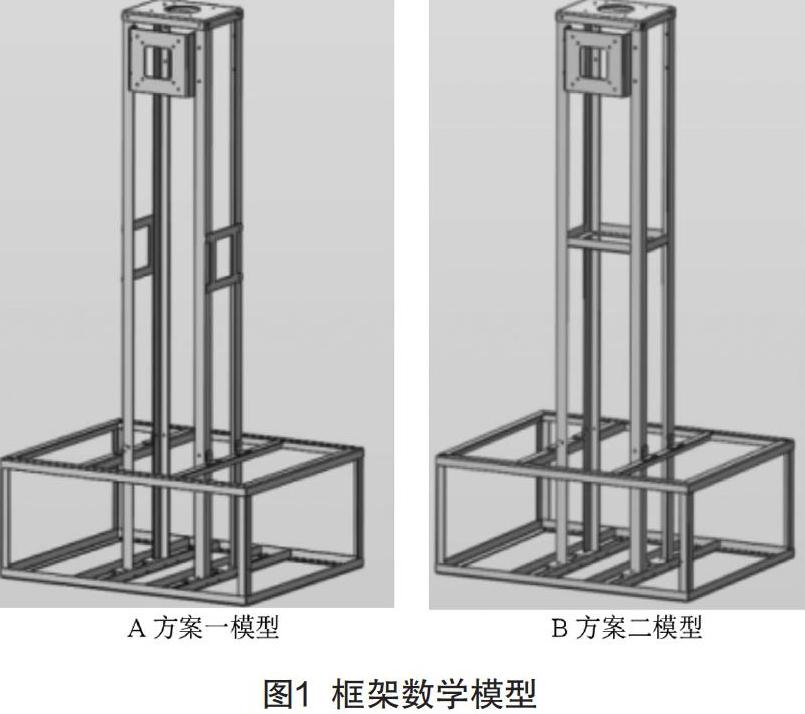
门岗机器人框架采用等边角钢进行搭建,其模型如图1所示,其中A为方案一模型,该方案在框架的两侧增加矩形框架。B为方案二模型,在框架中周向加4根角钢。
2 计算分析
2.1 加载设置
(1)频率提取。对模型进行模态分析,获取框架整体的固有频率和主要模态振型。
(2)静力加载。对框架进行力学加载。根据框架外设备质量,加载200 N静压力。再根据转动电机扭矩,加载5 N·m的扭矩。
2.2 模态计算结果
模型计算后,其主要频率分布如表1所示。
方案二模态较方案一有较大改善,体现在前几阶固有频率值上,有了一定增加,说明整体刚度有了一定提升。
3 静力学分析结果
方案一力学分析结果如下:
图2中,A为应力分布情况,应力最大位置位于加强结构与支撑角钢的连接处,最大值为7.4×106 Pa,远远小于其材料屈服强度。
B为变形量云图,最大位移位于顶端,其最大变形量为3.4×10-4 m。
C为方案二应力分布情况,其中应力最大的位置同样位于加强结构与支撑角钢的连接处,最大应力值为2.1×107 Pa,小于其材料屈服强度,但较方案一有所增加。
D为变形量云图,最大位移与方案一相同,其最大变形量约为4.4×10-4 m,表明加强结构对于框架刚度有一定提升。
4 结语
机器人框架在强度和整体刚度上均满足使用条件。框架的应力值和变形量都在允许范围内。整体模态分析结果表明,方案二的整体模态更加有利,对于整体刚度也有较大提升,因此建議选用第二种结构方案。
[参考文献]
[1]曲道奎.中国机器人产业发展现状与展望[J].中国科学院院刊,2015(3):342-346.
[2]尹婧.林间步行机器人的运动特性与动态仿真[D].哈尔滨:东北林业大学,2010.
[3]杨国良.工业机器人动力学仿真及有限元分析[D].武汉:华中科技大学,2009.
猜你喜欢
小资CHIC!ELEGANCE(2022年1期)2022-01-11
现代职业教育·职业培训(2019年12期)2019-02-03
电子技术与软件工程(2018年11期)2018-02-25
科技创新与应用(2016年34期)2016-12-23
农机使用与维修(2016年10期)2016-11-10
科技视界(2015年25期)2015-09-01
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
中学生数理化·八年级数学北师大版(2008年1期)2008-08-27
