
基于深度学习的测控数据传输技术
2020-04-02 10:10:46刘步花
无线电工程 2020年4期
丁 丹,杨 柳,刘步花
(航天工程大学 电子与光学工程系,北京 101416)
0 引言
测控数据传输包括飞行器的遥控、遥测和载荷数据传输[1-2]。文献[3-5]从降低解调门限的角度,分别提出了相位噪声迭代补偿、传输通道优化设计和多码率融合LDPC码等提升传输速率的方法。文献[6-8]则从优化传输策略的角度,分别提出了SOQPSK、空时编码、变速率与空间复用相结合等提高传输效率的方法。然而,上述方法是根据试验任务预设指标进行逐模块设计,并针对试验场区常规信道环境进行各模块的局部优化,包括调制解调、信道编解码和信道均衡等。然而,作战条件下的测控信道呈现非线性、多径、干扰和时变等复杂特性,难以用常规线性数学模型描述,各模块独立优化的传统方式不能做到全局最优拟合与跟踪,严重影响战时系统整体性能的发挥。
深度学习[9-10]是人工智能领域的创新成果,能够利用神经元的灵活组合来逼近任意复杂的系统函数,并通过在线学习适应环境的时变性,从而将系统调节为整体性能最优的架构。深度学习网络是克服系统复杂性、适应环境时变性的有力工具,是解决上述问题的有效手段。文献[11-13]的研究成果说明,深度学习可以从信道编解码、信道估计、信道均衡、信号检测和端到端接收等多个方面提升物理层传输性能。
本文研究基于深度学习的测控数据传输技术,运用深度学习网络统一实现调制解调、信道编解码、信道均衡、非线性补偿和干扰消除等多项功能,从而将系统性能始终调节在全局最优状态,解决航天测控系统对战场复杂时变信道适应能力的短板弱项。
1 系统设计
1.1 深度学习模型
深度神经网络(Deep Neuron Network,DNN)是通过多层感知器的级联形成,因而又称为多层感知器,这就构成了多隐层的前馈神经网络,结构如图1所示。
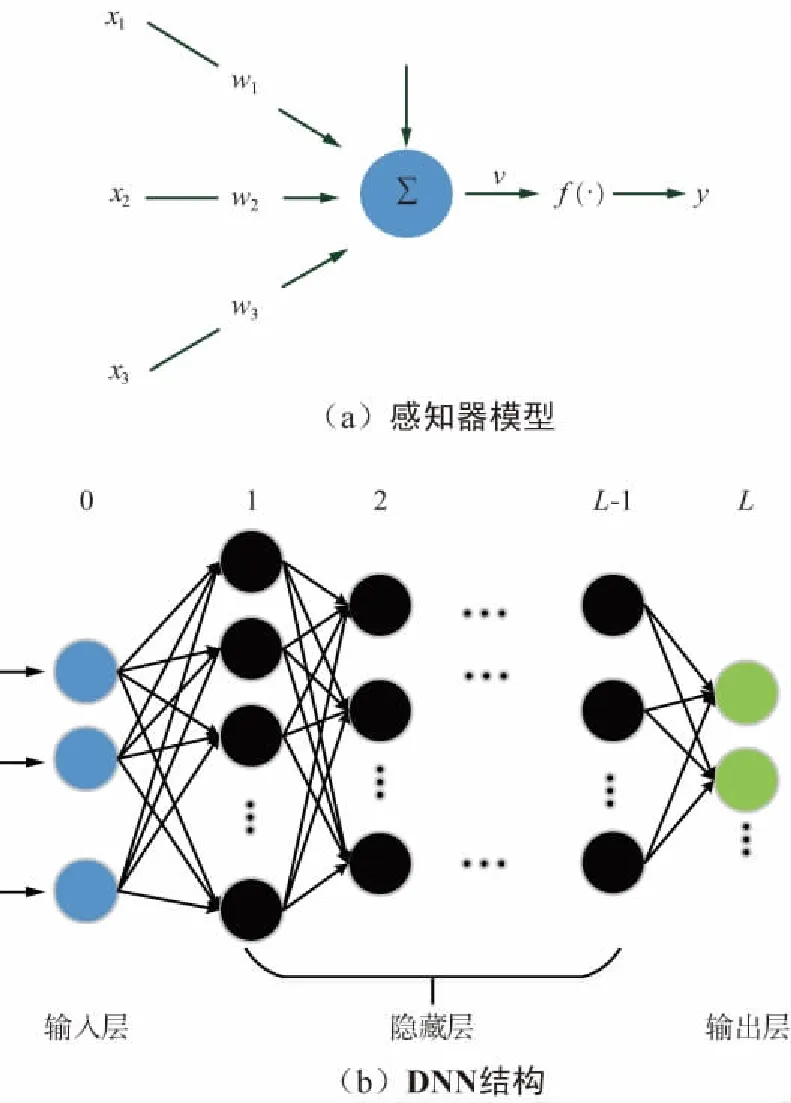
图1 感知器模型和DNN结构Fig.1 Perceptron model and DNN structure
该DNN总计有L+1层,其中第0层为输入层,第1~L-1层为隐藏层,第L层为输出层,相邻层之间通过前馈权值矩阵连接。假设第l层有nl个神经元,这些神经元的输入组成的向量为z(l),输出组成的向量为h(l)。同时,令u=h(L)对DNN最终的输出与隐藏层的输出进行区分,给定一个训练样本的特征x,此时有h(0)=z(0)=x。根据DNN的计算规则有:
z(l)=W(l)z(l-1)+b(l),l=1,2,...,L,
式中,W(l)∈nlnl-1为第l~l-1层的权值矩阵;b(l)∈nl为第l层的偏置向量。则有:
h(l)=fl(z(l)),
式中,fl(·)为第l层的激活函数。DNN常用的隐含层激活函数有S形(sigmoid)函数、双曲正切(tanh)函数和整流线性单元(reLu)函数等,形式如下:
输出层的激活函数视DNN所要解决问题的性质而定,回归问题通常采用线性激活函数或者sigmoid函数,二分类问题通常采用sigmoid函数,多分类问题目前采用softmax函数,其形式如下:
综合上述过程,训练样本的特征x首先被送到输入层,然后沿图中的箭头方向依次传播过各个隐藏层最后到达输出层,得到最终的网络输出,这一过程被称为前向传播。
1.2 基于深度学习的测控数据传输系统设计
基于深度学习的测控数据传输系统设计如图2所示。核心思想是利用DNN代替解调、解码和均衡等模块实现测控数据端到端接收,将各模块的局部优化转变为系统的全局优化,实现对复杂时变信道响应的最优逼近,获得整体最优性能。
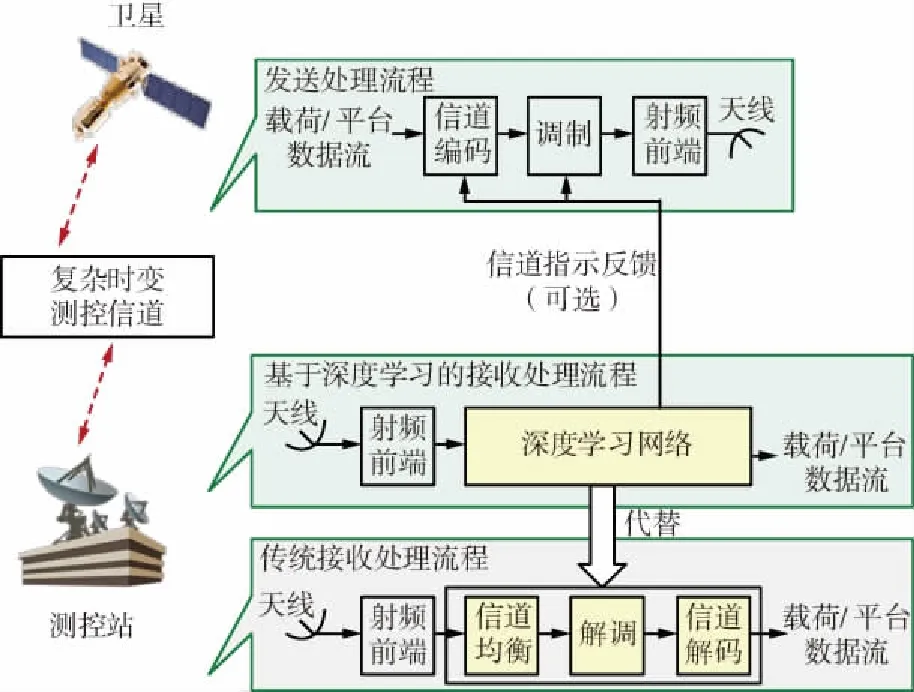
图2 基于深度学习的测控数据传输系统设计Fig.2 Design of TT&C data transmission system based on deep learning
1.3 运用模式
基于深度学习的测控数据传输系统工作模式包括以下几种:
(1)运用深度学习的测控数据变速率传输模式
利用深度学习网络逼近复杂的信道函数,并且准确感知链路余量的细微变化,通过信道状态指示反馈,及时、精细地调整编码速率、调制阶数,从而最大程度地利用链路余量实现最优的变速率传输。传输效率明显高于传统恒定速率传输模式,如图3和图4所示。
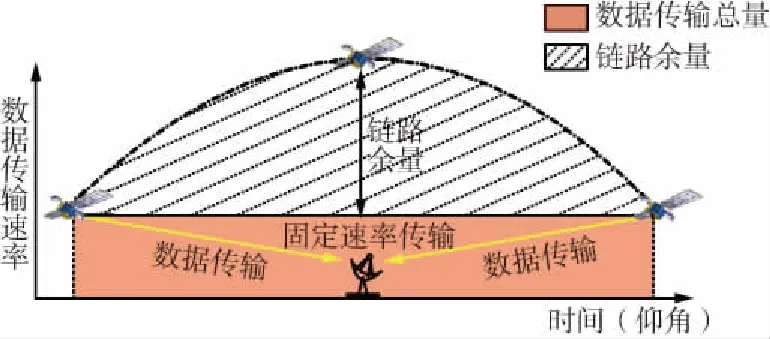
图3 传统恒定速率传输模式Fig.3 Traditional constant rate transmission mode
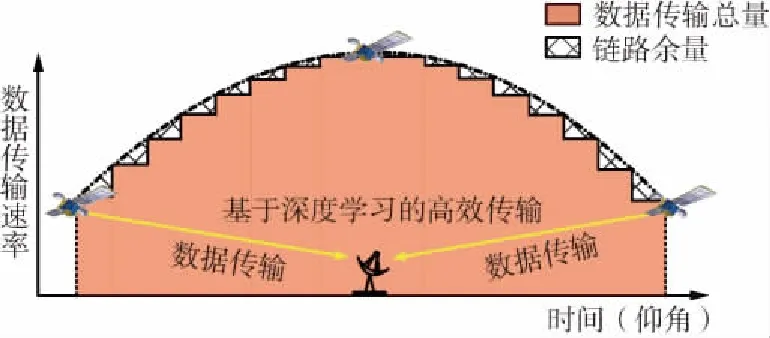
图4 基于深度学习的测控数据变速率传输模式Fig.4 Variable rate transmission mode based on deep learning
信道状态指示用来表征当前链路余量所处的档位,而非具体链路余量值。若划分16档位,则信道状态指示只需4 bit数据量,较容易实现实时反馈传输。
(2)基于深度学习的测控数据抗干扰传输模式
利用深度学习网络对复杂信道的最优逼近获得更多的链路余量,在恒定速率条件下获得更强的抗干扰能力。
(3)基于深度学习的测控环境自主认知模式
利用平时卫星过境空闲圈次,对各种典型信道环境进行大量离线训练;战时任务圈次通过在线学习识别并适应信道环境。
2 工作过程

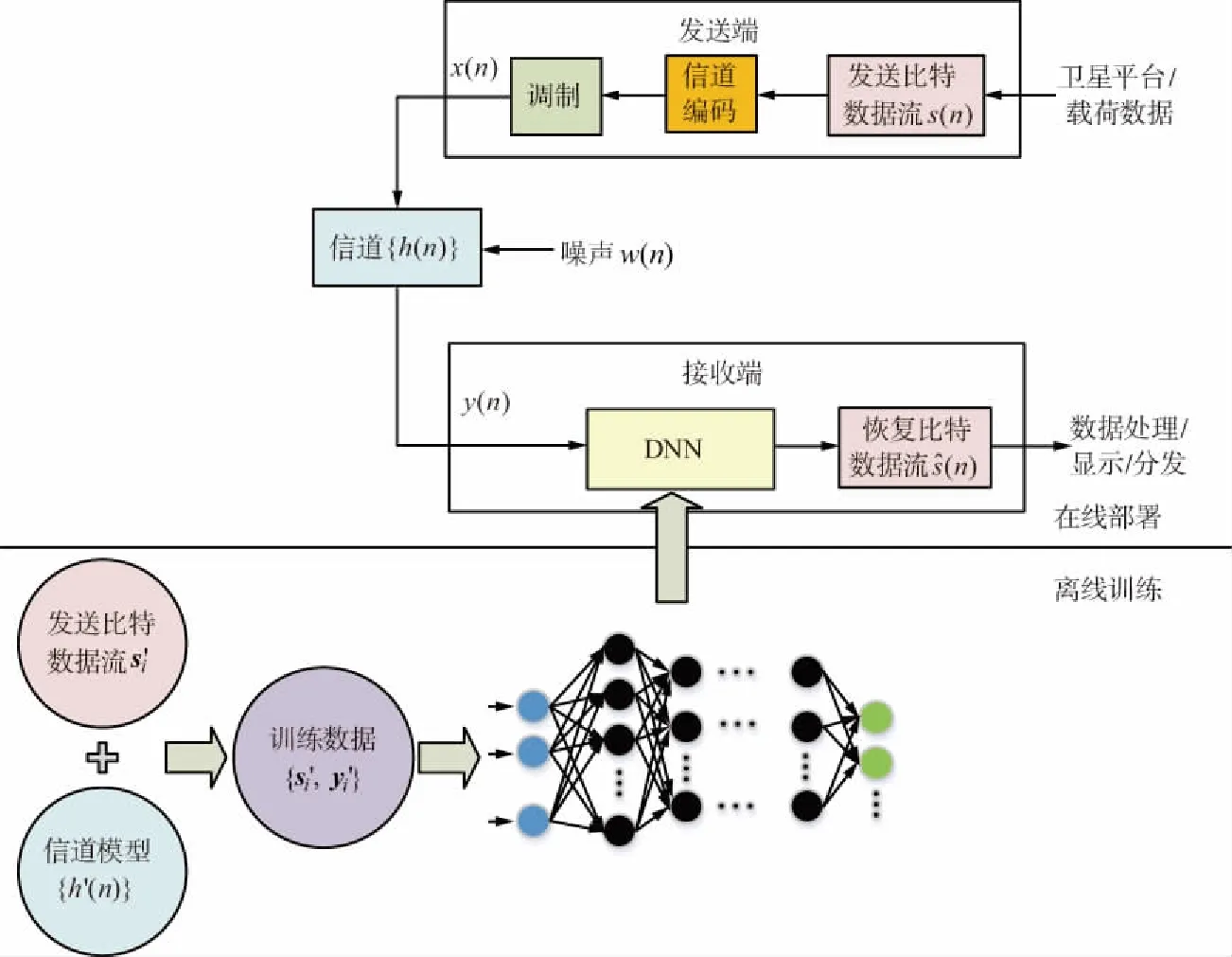
图5 基于深度学习的测控数据传输工作示意Fig.5 Schematic diagram of TT&C data transmission based on deep learning
在离线训练过程中,训练数据由2部分组成,一是神经网络的期望输出,即发送数据si′∈nL;二是由发送数据经过发送端处理后经信道传输到达接收端的接收数据yi′∈n0。设训练样本的数量为ζ,则DNN网络的训练样本集标签可以表示为Υ={si′∈nL|i=1,2,...,ζ},训练样本集的特征可以表示为Ξ={yi′∈n0|i=1,2,...,ζ}。DNN网络的待估参数为权值矩阵和偏置向量的集合θ={W(l),b(l)|l=1,2,...,L},DNN训练集上的损失函数可以表示为:

在训练数据的驱动下,采用误差后向传播方法以及Momentum,Root Mean Square,Adaptive Moment Estimation等优化算法[9]对上述损失函数进行迭代寻优,获得对复杂非线性测控信道函数的最优逆滤波,再通过在线部署即可实现最佳信道估计和信号检测。
3 仿真分析
仿真内容:非线性、多径信道条件下,基于深度学习的测控数据传输性能及开销。仿真条件如表1所示。
表1 仿真条件Tab.1 Simulation condition
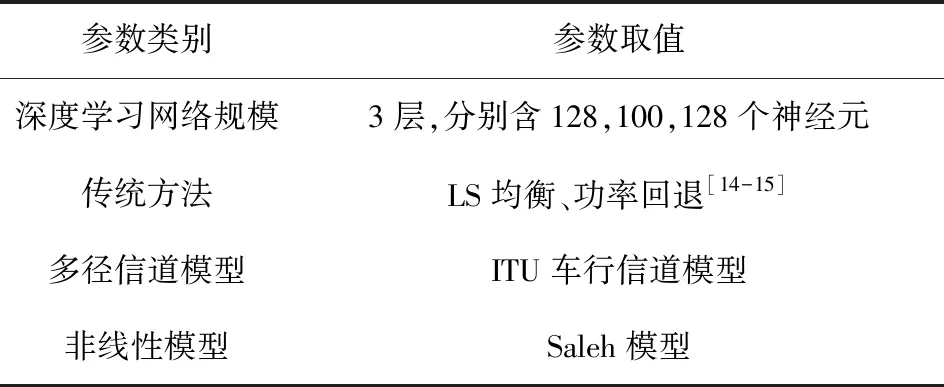
参数类别参数取值深度学习网络规模3层,分别含128,100,128个神经元传统方法LS均衡、功率回退[14-15]多径信道模型ITU车行信道模型非线性模型Saleh模型
传输性能仿真结果如图6所示。在“多径+非线性”这样一种较为复杂的信道条件下,相比传统的“LS均衡+功率回退”方法,运用深度学习网络取代非线性补偿、多径估计与均衡和数据解调等模块,性能仍然优于LS均衡、功率回退3 dB的传统方法,说明本文方法能够在保证更优传输性能的前提下,进一步提高3 dB发射功率,而不受非线性信道的影响;即本文方法可在获得3 dB链路余量增益的前提下,仍然保持更优的误码率性能。还可把3 dB的链路余量转化为数据速率的提升,可在保持相同链路余量的前提下,将数据速率提升为传统方法的2倍,且误码率性能更优。
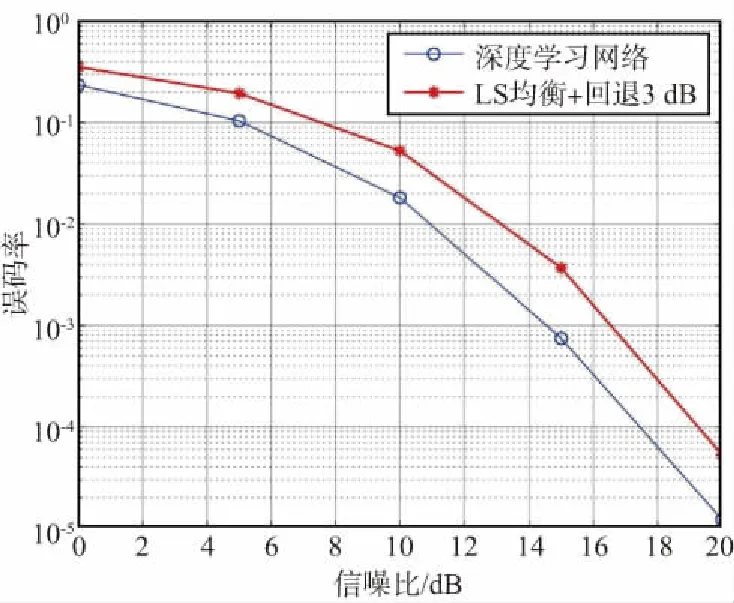
图6 基于深度学习的测控数据传输性能Fig.6 Performance of TT&C data transmission based on deep learning
传输开销仿真结果如图7所示。在相同的误码率性能前提下,传统测控数据接收机使用了128个导频,而基于DNN的测控数据端到端接收机只需使用16个导频,显著降低了传输开销。
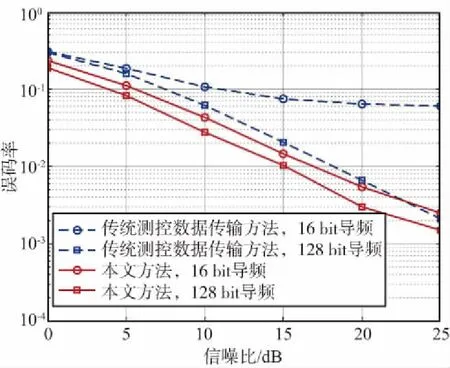
图7 基于深度学习的测控数据传输开销Fig.7 Overhead of TT&C data transmission based on deep learning
系统复杂度估算:该3层深度学习网络需要356次实数乘法,而传统非线性补偿、多径估计与均衡、数据解调等模块总共约需288次实数乘法、64次实数除法。可见基于深度学习的测控数据传输复杂度与传统传输体制相当。
4 结束语
运用深度学习网络代替传统调制解调、信道编解码和信道均衡等多个分立模块,能够将系统性能始终调节在全局最优状态,从而在战时复杂信道条件下,将传输容量提升至传统体制2倍以上,或将链路余量提高3 dB以上,同时保持与传统测控数据传输体制相当的系统复杂度。较低的网络复杂度,再加上高速处理芯片的运用,可保证系统运行的实时性。深度学习网络能够以较小的代价有效提升航天测控系统对复杂战场环境的适应能力,是一种十分具有潜力的新型传输技术,相关研究工作也可为各领域吸收人工智能创新成果提供有益借鉴。
猜你喜欢
纺织科学研究(2023年9期)2023-10-23 11:18:10
移动通信(2021年5期)2021-10-25 11:41:48
电子测试(2018年22期)2018-12-19 05:12:58
山东工业技术(2016年15期)2016-12-01 05:31:42
太空探索(2016年12期)2016-07-18 11:13:43
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27 06:31:42
华东理工大学学报(自然科学版)(2015年4期)2015-12-01 04:00:44
电子设计工程(2015年8期)2015-02-27 12:05:33
电子设计工程(2015年3期)2015-02-27 12:03:58
中国交通信息化(2014年3期)2014-06-05 03:07:09
