
AI机器人在地铁运营服务中的应用
2020-04-01 06:10刘宁牛特
计算机与网络 2020年24期
刘宁 牛特
摘要:针对在地铁运营服务中面临的运营安全管理不规范、信息咨询服务待优化、信息推送形式单一等诸多问题,通过分析地铁运营实际需求,在AI机器人服务方案基础上,结合机器视觉、语音交互、人脸识别、3D SLAM及避障等关键技术,设计了AI机器人在地铁运营服务中的功能,实现了运营安全管理、信息咨询优化和广告宣传等应用,对智慧轨道交通进行了新的探索。
关键词:AI机器人;地铁运营;机器视觉;语音交互;人脸识别;避障技术
中图分类号:TP393文献标志码:A文章编号:1008-1739(2020)24-54-4
0引言
近年来,随着我国人工智能和机器人技术的不断发展,AI机器人开始渗透到国民经济各行业当中。这些机器人的使用不仅可以降低人力成本,而且能够提升工作精准度和专业度,从而提高生产效率。在某些行业,AI机器人已经取代人力,成为行业劳动生产力的主力军。随着机器人的大量使用,我国已经成为全球最大的AI机器人市场。
在地铁行业,智慧地铁和智能运营等概念逐步提出并快速发展。利用传感检测、机器视觉、大数据分析、人工智能等技术打造的智能服务机器人,已逐步开始应用且不断发展,机器人助力地铁运营已成为常态。
随着我国城市化进程不断加快,城市轨道交通也在飞速发展。截止2018年底,中国大陆地区共有35个城市开通城市轨道交通运营线路185条,运营线路总长度5 761.4 km,全年累计完成客运量210.7亿人次[1]。作为城市经济发达程度的重要标志,地铁建设对于城市均衡发展和居民出行便利意义重大,但是受线路长、站点多、客流大等因素的影响,还普遍存在运营安全管理不规范、信息咨询服务待优化、信息推送形式单一等问题,这些问题的存在给传统的地铁运营服务提出了更高要求。
1 AI机器人服务方案
1.1总体架构
基于技术的不断进步,提出了智慧轨道交通的新概念。在此概念之下,利用图像处理、机器视觉、语音交互技术、人脸识别、物体识别、3D SLAM技术、避障技术及大数据智能分析等技术打造的智能机器人,取得了良好的应用和发展,机器人助力地铁运营已成为常态。目前的地铁机器人系统架构采用分层设计,整体分为基础层、支撑层、应用层和展现层4层,以及安全保障和标准规范两大体系,如图1所示。
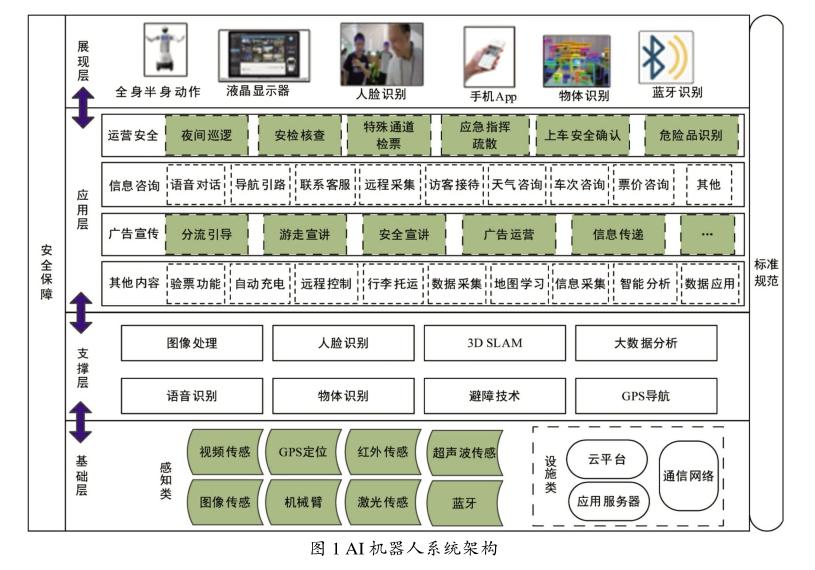
①基础层构建AI机器人的多维感知体系,包含感知类和设施类。感知类可以分为视频传感、GPS定位、红外传感、超声波传感、图像传感、机械臂、激光传感、蓝牙;设施类可以分为云平台、通信网络及应用服务器等。
②支撑层为智能AI机器人提供支撑服务,包括图像处理、人脸识别、3D SLAM、大数据分析、语音识别、物体识别、避障技术及GPS导航等。
③应用层提供各种应用,分为运营安全、信息咨询、广告宣传和其他内容4大类。
④展现层包含全身半身动作、液晶显示器、人脸识别、手机App、物品识别和蓝牙识别。
2 AI机器人关键技术
2.1机器视觉技术
机器视觉是一项综合技术,包括图像处理、机械工程技术、控制、电光源照明、光学成像、传感器、模拟与数字视频技术、计算机软硬件技术等。机器视觉能够将测量目标或研究对象转换成规定格式的数字图像信息,图像处理系统选择预先设置的图像处理算法,根据图像承载的像素、亮度、颜色等物理信息进行各种运算来获取目标物体的特征信息。机器视觉图像处理技术基于FPGA的底层图像信号处理器(Image Signal Processor,ISP)算法[2]。
2.2语音交互技术
语音交互功能是机器人的基本智能交互功能之一,主要包括6个技术模块[3],如图2所示。
①语音识别模块:实现用户输入语音到文字的识别转换。
②语言解析模块:对语音识别结果进行分析理解,获得给定输入的内部表示。
③问题求解模块:依据语言解析器的分析结果进行问题的推理或查询,求解用户问题的答案。
④对话管理模块:基于对话历史调度人机交互机制,辅助语言解析器对语音识别结果进行正确的理解,为问题求解提供帮助,并指导语言的生成过程。
⑤语言生成模块:根据解析模块得到的内部表示,在对话管理机制的作用下生成自然语言句子。
⑥語音合成模块:将生成模块生成的句子转换成语音输出。

2.3人脸识别和物体识别技术
人脸识别是基于人的脸部特征信息进行身份识别的一种生物识别技术。物体识别是对三维世界的客体及环境的感知和认识,属于高级的计算机视觉范畴。
①实例学习:将人脸检测视为区分非人脸样本与人脸样本的2类模式,通过对人脸样本集合非人脸样本集进行学习以产生分类器。
②子空间方法:在人脸识别中利用的是主元子空间,而人脸检测利用的是次元子空间,用待检测区域在次元子空间上的投影能量,即待检测区域到特征脸子空间的距离作为检测统计量。
③空间匹配滤波器方法:包括各种模板匹配方法、合成辨别函数方法等,以数字图像处理与识别为基础的结合人工智能、系统学等学科的研究方向[4]。
2.4 3D SLAM技术
同时定位与建图(Simultaneous Localization and Mapping,SLAM)是指机器人在自身位置不确定的条件下,在完全未知环境中创建地图,同时利用地图进行自主定位和导航[5]。机器人在位置环境中从一个未知位置开始移动,在移动过程中根据位置估计和传感器数据进行自身定位,同时建造增量式地图。
基于霍夫曼方法的SLAM的基本过程是:①使用扩展卡尔曼滤波(Extend Kalman Filter,EKF)进行定位;②获取所有路标和机器人的位置信息作为先决条件;③使用矢量方程存储路标和机器人的位置;④通过循环迭代减少每次的误差量。
2.5避障技术
避障是指机器人在行走过程中,通过传感器感知在其规划路线上存在静态或动态障碍物时,按照一定的算法实时更新路径,绕过障碍物,最后达到目标点。机器人避障技术的基础是移动机器人自身状态的确定和周围环境信息的获取,这些信息都是通过安装在机器人上的传感器获取的。通过传感器进行前端信息的获取并提取特征,最终进行决策融合达到联合识别的结果[6],如图4所示。

3 AI机器人的应用
结合地铁运营管理业务实际,并且利用上述关键技术,系统主要实现了以下几个方面的实际应用。
3.1运营安全管理
运营安全管理主要有以下方面的应用:
①安检核查:机器人采用人脸识别和物体识别技术,进行安检核查。
②特殊通道检票:机器人在特殊通道进行出入登记和检票。
③夜间巡逻:在夜间地铁站关闭后,由机器人对地铁站进行无死角巡逻,一旦发现可疑踪迹和安全隐患,可以立即上报。
④应急指挥疏散:在出现紧急事故时,机器人可协助现场工作人员对乘客进行紧急疏散。
⑤救援探测:在出现危险事故时,可利用机器人进入危险区域进行救援探测,节省救援时间,降低人员伤亡几率。
⑥上车安全确认:机器人确认安全门是否正常关闭,并且自行上报。
3.2信息咨询优化
信息咨询优化主要有以下方面的应用:
①语音对话:机器人具有智能语音对话功能,可提供地铁运营、换乘相关地铁班次等相关咨询。
②导航引路:机器人可学习规定区域内的地图信息、位置信息等,为乘客提供精确的导航引路功能,并满足智能避障功能。
③联系客服:机器人具有语音通信功能,并与车站无线和车站电话互联互通,乘客可以通过机器人呼叫地铁客服咨询问题,投诉、上报可疑事件等。
3.3广告宣传
广告宣传主要有以下方面的应用:
①分流引导:机器人可在地铁入口处进行限流,待接到放行指令后再继续放行乘客进站乘车,同时可引导密集通道处的乘客到人数相对较少的通道内排队等候。
②广告运营:机器人可通过播放预定义的视频或通过客户端推送视频播放广告。
③系统对接:机器人显示屏可以根据地铁运营需要,与乘客信息系统对接,并通过机器人上的摄像头及传感器来统计各种广告对乘客的吸引程度。
3.4其他内容优化
其他方面的应用有2个:
①远程控制:地铁运营人员可以通过手机App远程控制机器人,对站内运营情况、人员工作状态、突发情况进行巡视,便于远程了解各站的运营情况。
②行李托运:机器人可为乘客提供负重托运服务,采用模块化设计,能够进行多种方式组合的托运。
4结束语
目前机器人技术发展日新月异,机器人从单体作业向可自主学习、自律行动的方向发展。除了传感器技术、软件信息处理能力的提升进步之外,深度学习等AI技术(图像与语音识别、机器、学习)的跨越式发展,也推动了机器人自身能力的进一步提升,使机器人能够从事更加高级的工作。机器人从过去的简单重复性劳动,变得能够互联、共享,甚至协同工作。
基于AI机器人的地铁运营应用是一项复杂的工程。地铁机器人在地铁中的应用越来越受关注,随着机器人技术的发展,其自身的功能和性能将会进一步提高,可以开发出更多的地铁应用模式,在这个过程中可能会遇到一些新的问题,期望越来越多的人共同来探索和解决。
参考文献
[1]佚名.城市轨道交通2018年度统计和分析报告[J].城市轨道交通,2019(4):16-34.
[2]龚爱平.基于嵌入式机器视觉的信息采集与处理技术研究[D].杭州:浙江大学,2013.
[3]李振宇.面向教育机器人的语音交互系统的设计与实现[D].武汉:华中师范大学,2018.
[4]沈学举,王永仲,姚广涛.Vander Lugt相关器中几种空间匹配滤波器算法比较[J].光学技术,2008(2):314-316.
[5]耿长良.3D SLAM技术在轨道交通竣工测量中的应用[J].北京测绘,2020,34(10):1463-1467.
[6]呂漫丽.基于多传感器信息融合的移动机器人避障研究[D].吉林:东北电力大学,2008.
猜你喜欢
意林·作文素材(2021年9期)2021-07-06
文萃报·周五版(2021年17期)2021-05-31
中国计算机报(2020年13期)2020-04-26
阅读(快乐英语高年级)(2019年5期)2019-09-10
阅读(快乐英语高年级)(2019年2期)2019-09-10
小说界(2018年5期)2018-11-26
通信产业报(2018年10期)2018-04-13
发明与创新·大科技(2016年1期)2016-02-01
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
