
人与陪伴机器人的近体学交互研究
2020-03-30 03:52林镇郁唐林涛
设计 2020年1期
关键词:人机交互
林镇郁 唐林涛

摘要:本文主要研究了陪伴机器人与人建立陪伴关系的情况,通过实验分析了人和机器人的空间距离对“亲密程度”的影响。在10×10平方米空间里,原型的陪伴机器人和人分别保持1米、0.5米、0.15米的距离进行跟踪;通过跟实验对象的深度访谈,了解人在不同距离上对陪伴机器人的感觉以及心理上与机器人建立的亲密关系。研究发现,在有限空间里人与机器人移动时,空间距离对亲密关系的建立不会产生明显的影响。本文还通过实验探究了机器人的外形、触感等其他非语言元素对人与机器人间亲密关系的影响。
关键词:人机交互(HRI,Human Robot Interaction) 陪伴机器人 近体学
中图分类号:TB472
文献标识码:A
文章编号:1003-0069(2020)01-0032-03
引言
2019年1月在美国举行的国际消费类电子产品展览会(CES,International Consumer ElectronicsShow)展出了举世瞩目的三种陪伴机器人——Lovot(日)、Liku(韩)、Kiki(美),它们都注重强调“情感”。为了与人进行更多情感交互,这三种陪伴机器人在硬件和软件上做出了各种变化。尤其是GrooveX公司的Lovot,通过被人拥抱,尝试跟人建立更加亲密的关系。
然而,2018年美国布鲁金斯研究所(The Brookings Institution)发布的调查结果表明,人与机器人的关系并不是很理想。在网上通过对2021名成年美国人进行调查发现,61%的人对机器人的感觉并不舒服,对机器人感觉舒服的人只占16%。2017年Kim通过研究提出,机器人和人的实体交互越丰富,建立陪伴关系的效果越好[1]。但是现有的机器人实体交互方式还不够丰富。为了使人与机器人建立更好的陪伴关系,需要进行更深入的物理交互研究。因此,本文研究了人与陪伴机器人的“空间距离”对建立陪伴关系的影响,如图1。
一、社交机器人(Social Robot)与陪伴机器人(Companion Robot)的关系
在家里与人交互的机器人有社交机器人(Social Robot)和陪伴机器人(Companion Robot)两种,两个术语经常被混用,因此有必要对两者的差异进行探究。
(一)社交机器人(Social Robot)
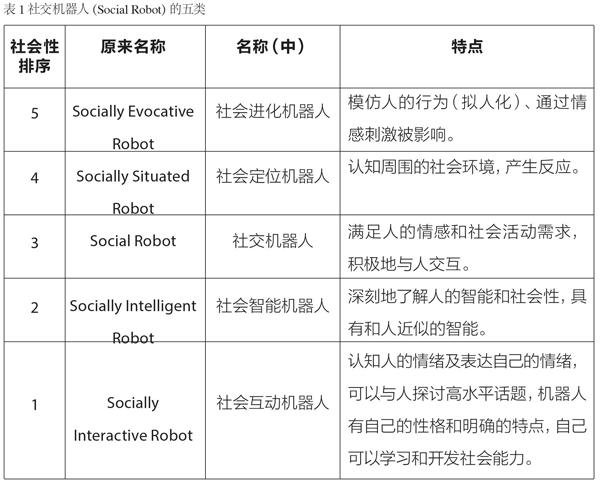
社交机器人是与人进行感性交互的机器人,人们会认为社交机器人是“有社会性的个体”。在HRI的领域,社交机器人可分为以下五类[2],如表1:
(二)陪伴机器人(Companion Robot)
陪伴关系(Companionship)是依恋感(Attachment)、亲密感(Intimacy)、承诺感(Commitment)三种感情的结合。依恋感是情感的纽带,亲密感是紧密的连接,承诺感是保持长期关系的关键[1]。
在HRI领域,陪伴关系(Companionship)是指人和机器人之间建立了心理关系;在智能系统之间陪伴关系是指互相共享有形信息和心理活动[1],如图2。
两者对比可以发现,社交机器人(Social Robot)的关键在于人是否认可机器人具有社会个体的功能,陪伴机器人(Companion Robot)的关键则在于与人建立陪伴的“情感的关系”。所以两者并不是完全不同的。本文验证了社会机器人是机器人成为陪伴机器人的必备条件。
二、陪伴机器人的发展概况
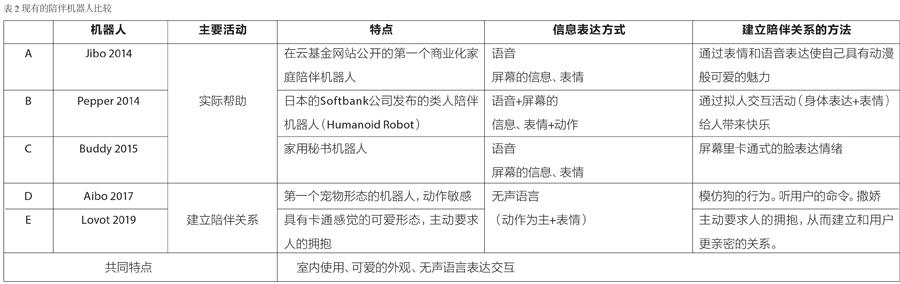
从图3和表2的案例来看,陪伴机器人主要在室内使用,为了减少和人的心理距离,通常具有可爱的外观。陪伴机器人通过与人交互建立陪伴关系。有研究表明,机器人的表情和无声语言行为会给人带来情绪上的反应,从而建立亲密关系[4]。
三、陪伴机器人和近体学(Proxemics)
以上案例表明,宠物形式的陪伴机器人即使不会使用人类的语言进行交互也可以建立陪伴关系。因此可以知道,使用无声语言也能够和人建立关系。本文将研究“距离和空间”的无声语言元素对人与机器人陪伴关系建立的影响。
空间语言是无声语言交互的一种,研究交互对象在空间中的距离和姿势所生产的影响和作用[5]。空间语言的研究内容可分为两个方面:人与人之间保持不同的身体距离会表达怎样的意义;办公室、建筑、城市之间空间排列的意义。
Hall(1959)根据人和人的距离把空间语言分成4种,提出了近体学(Proxemics)。
(一)15-46cm,亲密的距离:通常产生身体上的接触,即使不通过有声的语言也可以理解对方。
(二)46-122cm,私人的距离:属于家人和好友之间的距离,一般伸手时可以互相接触。
(三)120-370cm,社会的距离:一般社会团体的正式、非正式距离。
(四)370cm以上,公共的距离:通过很大的声音或动作可以交互的距离。
在人和机器人的距离方面,目前的研究不是很多。美国Willow garage研究所(2009)的室内移动机器人将人当作障碍物,机器人会与人保持一定的缓冲区以防止碰撞。[6]随着技术的进步,如今的机器人可以识别人脸,因此可以区分环境障碍物和人,从而有了和人接触并建立陪伴关系的可能。因此,本文想要通过实验探究近体学在人机关系中的适用性。
四、陪伴机器人的近体学(Proxemics)实验
为了验证近体学在陪伴机器人领域的适用性,本部分进行了人和机器人之间距离变化对陪伴关系影响的实验。实验中陪伴机器人以不同的距离跟踪实验对象,然后对实验对象进行访谈,从而了解距离对陪伴关系的影响。因原型机器人技术和与人的关系问题,所以将其设定为宠物关系[7],并在人的后面进行跟踪。陪伴机器人是可以通过遥控器控制的兩轮机器人,具有可爱的造型,如图4、表3。
(一)实验条件
1.实验场地:清华大学人文图书馆咖啡厅前空地
2.原型机器人:Ranababy远程遥控视频车机器人+圆环泡沫造型
3.尺寸:75×75×15cm
4.功能:4方向移动+静态倾角变化
5.控制方式:在实验对象看不见的地方使用遥控器控制机器人
6.实验对象:5个清华大学研究生(工业设计硕士、设计理论硕士2名、历史博士、教育博士)-每个实验前有关于陪伴机器人的概念的15分钟培训
7.结论获取方式:深度访谈
实验结束之后进行一对一访谈,1-4实验之后与机器人的亲密度变化和原因、关于其他意见讨论-每个人15分钟
(二)假设
Hall的近体学(1959)适用于人与机器人之间,即距离越近,关系越亲密。
(三)实验内容,如图5
1.原型机器人分别以1m、0.5m、0.15m的距离跟踪实验对象移动5m。
Hall的近體学有,0.15m、0.46m、1.2m、3.7m以上,的四种标准。但从本实验看在10m×10m的有限室内空间里面,机器人与人的距离3.7m以上的话,不会有建立亲密关系的意义。所以按照前三个标准来决定0.15m、0.5m、1m的距离。
2.实验对象坐着时,原型机器人接触实验对象身体(小腿和膝盖附近)。
3.实验对象站着时,原型机器人原地旋转。4.实验对象坐着时,原型机器人分别距离1m、0.5m、0.15m旋转。
(四)访谈总结
1.五个实验对象都觉得被机器人跟随时,无论距离长短,都会让
实验对象感到不适。他们会有被跟踪骚扰的感觉。尤其是距离50cm时,感觉最不适(三个实验对象的意见)。
2.原型机器人接触实验对象时,实验对象觉得比较好奇(本实验的机器人接触部位用泡沫做出来,接触的强度很弱)。实验对象感受到了原型机器人想要搭话沟通的意图。
3.原型机器人连续坐地旋转时,实验对象认为原型机器人在撒娇,能感受到类似宠物的感觉。
4.实验对象不移动,原型机器人在视觉范围内,与“实验1”结果不同,实验对象觉得和机器人建立了好的关系。但是不同的距离没有带来亲密度的差别。
(五)实验结果
实验表明,机器人和人的关系与传统近体学不同,距离的差别并不会影响亲密关系的建立。而原型机器人跟随实验对象时,实验对象会有不舒服的感觉。反而实验对象认为原型机器人在他们的视觉范围内时,会建立亲密关系,而在室内空间内,距离远近对亲密关系的建立仍然没有影响。虽然本实验在10m×10m的有限室内空间进行,但是本环境与陪伴机器人的真实使用环境近似,可以认为实验结论在真实环境中仍然适用。
通过对实验对象进行追加访谈,得到了空间距离以外其他元素可能会对人和机器人亲密关系的建立产生更大影响。
1.视觉元素(外形)“因为原型机器人长得可爱而有了好感。”“有了眼睛的动作感觉跟宠物一样。”
2.时间和空间综合元素“我跟机器人在一个地方的时间长了,就会有和机器人关系好了的感觉”、“在小的地方一直在一起,感觉原型机器人是活着的。”建立陪伴关系(companionship)的承诺感(commitment)有关。
3.触感元素“机器人接触我的时候,感觉它有生命。”“接触的动作,好像在跟我撒娇的感觉。”
(六)实验不足
1.实验对象的数量(5人)不具科学代表性。
2.实验环境和普通陪伴机器人使用环境不同,实验环境的机器人周围行人会比较多。
3.实验访谈集中于陪伴关系(companionship)的三个情感元素(依恋感、亲密感、承诺感)中的亲密感。
结语
陪伴机器人在不久的未来或许可以代替动物和人,与人建立起陪伴(companionship)关系[9]。现有的陪伴机器人为了跟用户建立陪伴关系——Companionship(依恋感、亲密感、承诺感),通过各种方式努力与人交互,其中语音的方式与屏幕上的语言信息方式交互的案例最频繁。但陪伴机器人要与人成为陪伴——建立情感的关系(Companionship),除了有声语言的交互之外,还需要无声语言的方式交互[10],虽然研究表明现有宠物角色的陪伴机器人在动作表达交互上对人有积极影响。陪伴机器人的活动环境在与人一起在同一个有限的室内空间,但是交互的空间跟距离的元素上的研究比较缺乏。
本文通过Hall的《近体学》的理论应用到机器人与人的交互,建立更亲密的关系。但通过本文的实验,可以知道机器人和人的关系与人和人的关系不一样,拟人的方式——《近体学(Proxemics)》不能盲目搬用。对于移动范围变大的情况,需要进一步实验研究得出结论。通过实验对象的深度访谈可以得出三个结果。
第一、陪伴机器人和人交互需要考虑对象之间的距离、视觉、触觉及其他感觉等综合性的元素。因为机器人和人不一样,没有生命感,所以机器人动作时,在人的视觉范围内动作等需要给人提醒存在感。空间距离的元素和其他感觉元素在一起交互[11],人和机器人建立亲密的关系会有更好的效果。
第二、陪伴机器人和人的距离及亲密度没有正比例的关系,但是机器人紧贴在一起或接触的时候,人觉得更有“亲密关系”的感觉。人摸着毛绒玩具有的感情移入并建成亲密关系沟通的心里[12],会应用到距离、触觉及人和机器人建立亲密关系的交互。不仅仅是通过触觉的交互会形成依恋感。
第三、陪伴机器人会在人旁边的位置陪伴,和人之间的近体学一样,亲密关系更容易设定。需要进一步研究人与机器人的近体学和时间关系,建立承诺感以及更完整的陪伴关系。
为了使陪伴机器人和人建立更亲密的关系,设计师需要深入研究人与机器人更丰富的无声语言的交互。笔者将针对人与机器人的交互进行更深层次的剖析,优化并深究新的空间及距离的互动模式。
参考文献
[1] (韩)Kim Aram,A home social robot for social relationships:R&D of a home social robot auditorily sharing in- home activity information of single-person households[D] ,Yeonsei university Human-Computer Interaction major, 2017.
[2] Breazeal,C.,Toward sociable robots[J] ,Robotics and Autonomous Systems,2003,167-175.
[3] Fong,T.,Nourbakhsh,I.,& Dautenhahn,K.,A survey of socially interactive robots[J] ,Robotics and Autonomous Systems,2003,143-166.
[4] Lee,K. M.,Jung,Y.,Kim,J.,& Kim,S. R.,Are physically embodied social agents better than disembodied social agents?:The effects of physical embodiment,tactile interaction,and peoples loneliness in human–robot interaction[J] ,International Journal of Human-Computer Studies,962-973.
[5] Sundaram,D.,& Webster,C.,The Role of Nonverbal Communication in Service Encounters [J]. The journal of Marketing Service Marketing[J] ,378-391.
[6] Proxemics and Human-Robot Interaction at Willow Garage (2009),http://www.willowgarage.com/ Blog?page=37.
[7]王香琴、陳晓华,共生理念在小型犬陪伴类产品中的应用研究[J].设计,2019(02):138-140.
[8]张简一、陈欣、张琬琦,导盲机器人的用户体验研究与设计[J].设计,2018(23):16-19.
[9] (韩)Lee Seulbi,A study on Active Listening Feedback of the Robot for Conversation Interaction between the Elderly and the Companion Robot[D] ,Korea university Industrial design major,2018.
[10] Ray Birdwhistle,Paralanguage:25 years after Sapir[J] ,Lectures on experimental psychiatry,1961,43-64.
[11]陈骏、张迪,日用产品的触觉设计研究[J].设计,2014(02):57-58.
[12] (韩)LeeInsoon,The effect of Teaching-Learning method through the puppet mediator by Multiple Intelligences Theory[D] ,Education Administration,Hanyang University,2009,14.
猜你喜欢
科技创新导报(2016年23期)2016-12-23
电脑知识与技术(2016年26期)2016-11-24
计算机教育(2016年7期)2016-11-10
电脑知识与技术(2016年17期)2016-07-23
科教导刊·电子版(2016年17期)2016-07-16
电脑知识与技术(2016年7期)2016-05-19
电脑知识与技术(2016年7期)2016-05-19
计算技术与自动化(2015年4期)2016-03-25
心理技术与应用(2015年11期)2015-12-25
物联网技术(2015年11期)2015-11-26
