
类F-16飞行器风洞虚拟飞行试验研究
2020-03-29 13:05张石玉赵俊波付增良周家检
实验流体力学 2020年1期
张石玉, 赵俊波, 付增良, 梁 彬, 周家检
(中国航天空气动力技术研究院, 北京 100074)
0 引 言
随着新型作战飞行器的快速发展,高机动性和高敏捷性成为先进作战飞行器的重要特性。在大迎角机动时,飞行状态变化剧烈,非定常流动特性和气动-控制耦合问题对气动研究、控制系统设计和地面验证提出了新的挑战[1]。传统的风洞试验基于小扰动线性化理论,从静态风洞试验、自由振动/强迫振动风洞试验、旋转天平试验等获得小扰动线性化后的气动导数,将各气动导数叠加以构建飞行器的气动数据库和气动模型,并用于飞行控制律设计。这一过程获得的气动参数在小迎角时可靠性较高,但对于大迎角机动情况,由于没有考虑非定常流动特性的时间过程效应,试验结果不能充分反映实际飞行时的气动特性。基于小扰动线性化假设的气动数据设计的控制律在大迎角飞行时可能产生控制偏差,甚至由于严重的控制滞后、控制反效等作用导致灾难性后果。
飞行器风洞虚拟飞行试验技术是一种先进的风洞试验技术,模型安装在具有多个自由度的专用支撑机构上,放开3个角位移自由度(部分研究包括多个线位移自由度) ,通过舵面控制等手段对模型进行机动控制,在风洞中实现较逼真的模拟飞行器机动运动过程。通过运动过程分析能够清晰直观地获得飞行器在非线性非定常区域的气动特性;通过控制响应结果评估控制系统及控制律;为同步开展飞行器气动/控制设计、提早发现气动布局和控制律潜在问题、降低研制后期出现重大问题的概率、缩短型号研制周期、降低型号研制成本提供有效的试验评估手段。
各航空航天强国在相关领域开展了大量研究。英国Bristol大学Lowenbergy[1-5]所在团队自2002年以来开展了大量研究,包括:Hawk模型的迎角缓增长试验,获得了迎角上下行时不同的迎角振荡极限环区间;M2370模型飞机的三自由度开环控制响应试验,从试验数据中辨识了大量气动系数。之后研发了模型三自由度轴承+三自由度摇臂+配平翼系统,该系统的优点是实现模型绕速度轴的360°自由滚转,并提供俯仰沉浮运动自由度和侧向运动自由度,利用该系统开展了Hawk模型的多自由度阶跃信号控制响应试验、闭环控制响应试验。美国的Magill等[6]采用张线+俯仰滚转轴承的支撑方式开展了空空弹的三自由度控制响应试验,该机构的优点在于弹体模型可绕纵轴做360°自由滚转运动。德国的Bergmann等[7]研发了六自由度模型支撑机构,开展了民机模型和X-31模型的相关研究。英国Cranfield大学Carnduff等[8]研发了放开沉浮运动的四自由度模型支撑机构,开展了Hawk模型的控制响应试验。瑞典皇家技术学院Stenfelt等[9]开展了飞翼布局飞行器的偏航单自由度阶跃响应试验。
国内在相关领域研究相对较晚。中国航天空气动力技术研究院胡静、李潜[10]采用张线支撑+滚转轴承的形式开展了导弹外形的滚转偏航两自由度开环控制响应试验。中国空气动力研究与发展中心赵忠良等[11-13]在2.4 m跨声速风洞中建立了“自由滚转+自由俯仰+偏航驱动控制”的试验机构,开展了导弹类飞行器的开环、闭环控制响应试验。中国航空工业空气动力研究院针对四代机和飞翼布局飞行器开展了相关试验研究。南京航空航天大学等[14-19]在风洞试验相似关系、试验与真实飞行差异等方面开展了理论分析和仿真研究。
本文介绍中国航天空气动力技术研究院第二研究所在风洞虚拟飞行试验技术领域的研究成果。基于三自由度轴承支撑系统,以类F-16飞行器为研究对象,在低速风洞中开展多自由度开环/闭环控制响应试验,对飞行器短周期运动模态、自动配平、闭环控制信号跟随性进行了研究,并测量到大迎角俯仰失稳、负迎角荷兰滚失稳非定常试验现象。
1 试验系统
试验系统如图1所示,系统由试验模型、三自由度轴承机构、测控通信模块、支杆以及舵机、配重等组成。模型通过轴承机构安装在支杆上,轴承转心与模型质心重合,模型可绕质心自由转动。测控通信模块安装于模型内腔后段,实现模型姿态角速度和姿态角测量、舵机偏转控制、与上位机无线通信等功能。

图1 三自由度虚拟飞行试验系统
试验系统采用ADIS16488A微机械陀螺(MEMS) 测量模型角速度和角位移,角速度零漂标称值5.1°/h;采用无线射频模块实现与上位机的无线通信;伺服舵机为Power HD-D-04HV全金属舵机,输出扭矩标称值0.42 Nm;舵偏角运动范围限定为-30°~30°。
试验中,先将上位机根据当前状态解算舵机控制指令,并通过无线通信下传至测控通信模块,测控通信模块根据指令操纵舵机产生舵面偏转;模型在气动作用下发生角运动,由MEMS测量模型姿态角;之后模型状态信息通过无线通信上传至上位机,从而完成一个试验周期。
1.1 三自由度轴承
三自由度轴承机构是本试验的核心部件,机构示意图见图2,实物图见图3。三自由度轴承机构采用3个轴承分别提供偏航、俯仰和滚转转动自由度,并采用限位螺钉限制最大转角。试验时轴承机构运动范围分别为:俯仰角-35°~35°;滚转角-35°~35°;偏航角-45°~45°。
1.2 试验模型
试验模型为缩比系数1/14的类F/A-16战斗机模型。模型采用左右全动平尾同向转动控制俯仰角,差动控制滚转角,立尾后缘方向舵控制偏航角。模型外形与实际F/A-16战斗机相比存在部分差异(见表1),其余试验设备介绍详见文献[20]。
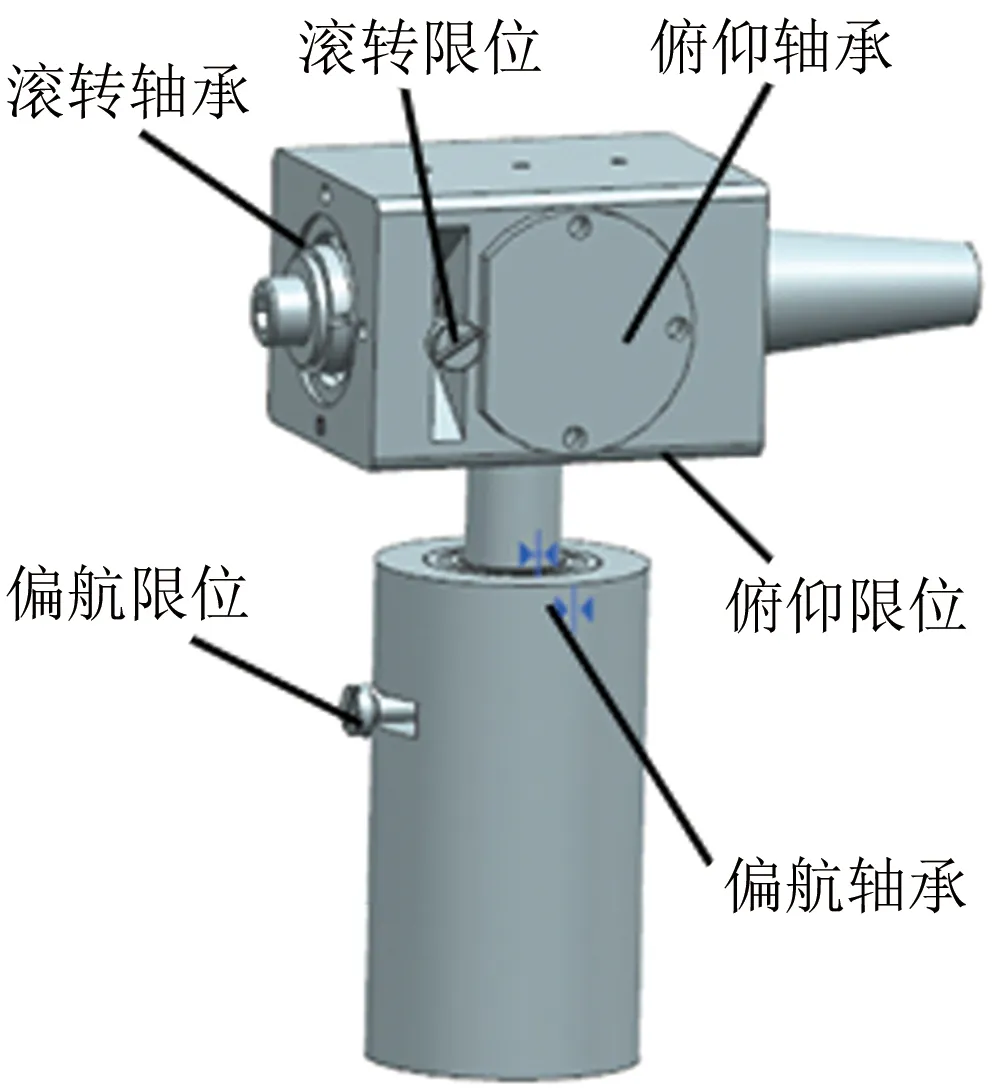
图2 三自由度轴承机构结构示意图

图3 三自由度轴承机构安装图
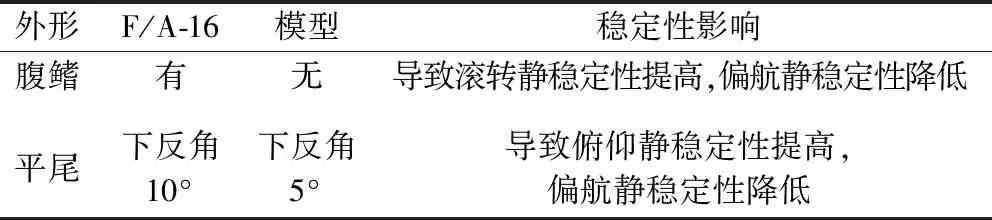
表1 模型外形与实际F/A-16差异表Table 1 Difference between test model and real F/A-16
2 典型风洞试验
风洞试验在中国航天空气动力技术研究院FD-09低速风洞中完成,试验风速为10~20 m/s。下文详细介绍开环/闭环控制试验以及试验中出现的特殊试验现象。
2.1 开环控制试验
开环控制试验是在配平状态下直接给定舵偏控制曲线并研究模型动态响应过程的试验,用于分析飞行器的短周期模态特性。从响应曲线中可辨识模型气动静、动稳定性导数以及舵效参数等气动参数。
2.1.1 升降舵开环控制试验
典型的升降舵开环控制试验曲线如图4所示,组图分别为升降舵偏角(δe) 曲线和迎角(α) 曲线。在5°配平迎角附近进行升降舵对偶方波机动,激励俯仰短周期模态运动,并在气动稳定性作用下恢复原运动状态。从响应曲线中可获得运动模态的相关参数,并辨识获得俯仰气动静、动稳定性导数。不同来流速度的气动参数辨识结果与文献[21]对比如表2所示。详细研究结果见文献[20]。
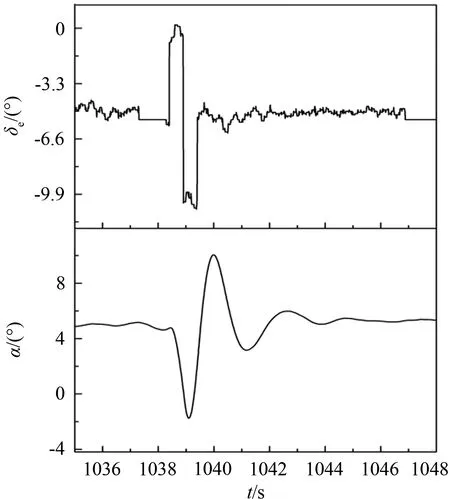
图4 升降舵开环控制试验曲线
Fig.4 Open-loop control test curves in elevator maneuvering flight mode test
表2 升降舵开环机动气动参数辨识结果
Table 2 Aero-parameter identification results of elevator maneuvering test
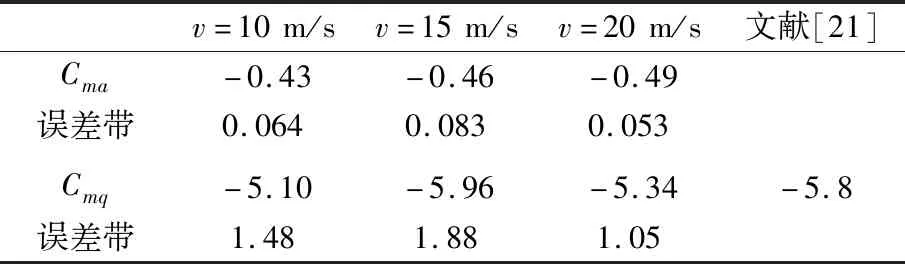
v=10m/sv=15m/sv=20m/s文献[21]Cma-0.43-0.46-0.49误差带0.0640.0830.053Cmq-5.10-5.96-5.34-5.8误差带1.481.881.05
2.1.2 方向舵开环控制试验
典型的方向舵开环控制试验曲线如图5所示,组图分别为方向舵偏角(δr) 曲线、侧滑角(β) 曲线和滚转角(Φ) 曲线。试验中,模型在5°迎角配平后,施加方向舵对偶方波机动,激励横航向荷兰滚模态运动。
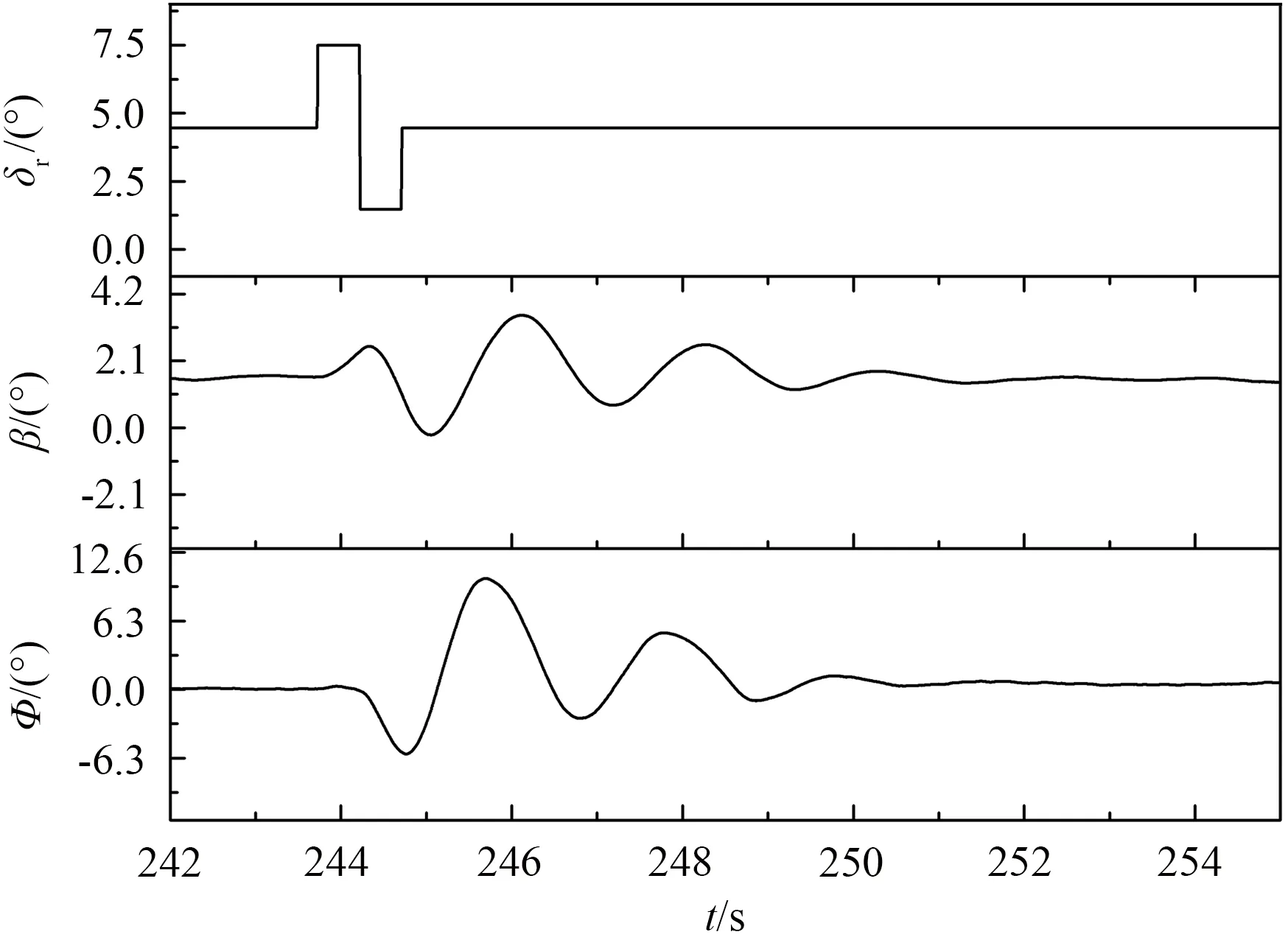
图5 方向舵开环控制试验曲线
2.2 闭环控制试验
闭环控制是以姿态角、过载等飞行状态作为控制指令,通过控制律解算舵偏信号,将飞行器相应飞行状态调整到指令状态的控制方式。风洞虚拟飞行试验中的闭环控制试验为开展飞行器控制响应研究、控制系统及控制律验证、控制效能评估等研究提供有效、直观、低成本的地面研究手段。
本试验闭环控制采用广泛应用于飞行器自动控制的比例-积分-微分控制器(PID) 。控制律基于F-16气动数据[21]设计,将迎角差量、积分量和变化率反馈给升降舵通道(全动平尾同向转动) ,作为其比例、积分和微分控制器的输入;将滚转角差量、变化率反馈给副翼通道(全动平尾差动转动) ,作为其比例、微分控制器输入;将侧滑角差量、变化率反馈给方向舵,作为其比例和微分控制器输入。
2.2.1 自动配平试验
不同迎角自动配平试验曲线如图6所示。组图分别为迎角曲线和升降舵偏角曲线。模型从0°配平迎角开始间隔为5°的自动配平试验。当迎角指令为25°时,出现俯仰失稳现象,同时升降舵偏角到达限位附近。之后开始迎角间隔为-5°的自动配平试验,当迎角指令为-20°时,出现迎角振荡发散现象。试验结果表明:俯仰气动稳定迎角范围为-15°~20°。
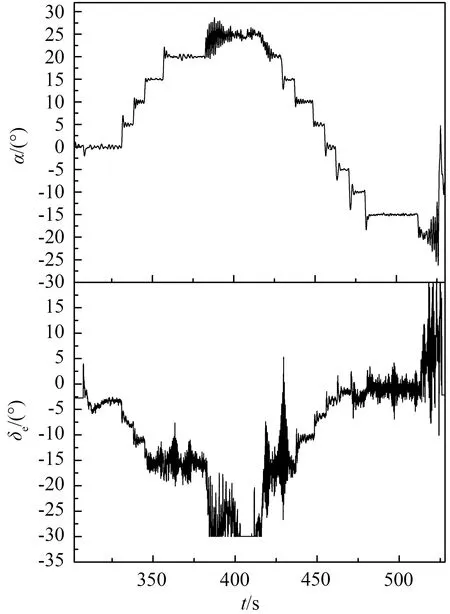
图6 不同迎角自动配平试验曲线
分析自动配平试验过程,可获得系统在不同迎角时的阶跃信号控制特性。图7为迎角α从0°至5°配平过程的理论迎角指令(α_commamd) 与实际迎角(α_test) 的对比。由图中可获得系统阶跃信号控制动态指标(见表3)。
表3 控制系统阶跃信号动态指标
Table 3 Dynamic performance of control system in step response test

超调量σ/(°)过渡过程时间ts/s振荡次数N25.25≈3
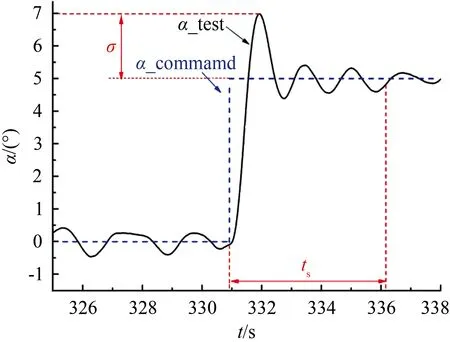
图7 自动配平过程的阶跃响应
2.2.2 迎角正弦指令跟随性试验
为了研究控制系统的迎角指令跟随性,设计了一种迎角指令为正弦信号的闭环控制试验。迎角指令数学表达式见式(1) ,指令幅值为3°,频率为0.2 Hz,指令持续时间为10 s。
α=3·sin(0.4πt)t=[0,10]
(1)
试验结果如图8所示。由结果可知,试验中模型跟随迎角指令做正弦运动,运动规律基本符合指令规律。由图中实际迎角与迎角指令曲线的峰值点对比可知,模型运动存在响应延迟和超调量,响应延迟为t2-t1=0.65 s,超调量为α2-α1=0.63°。
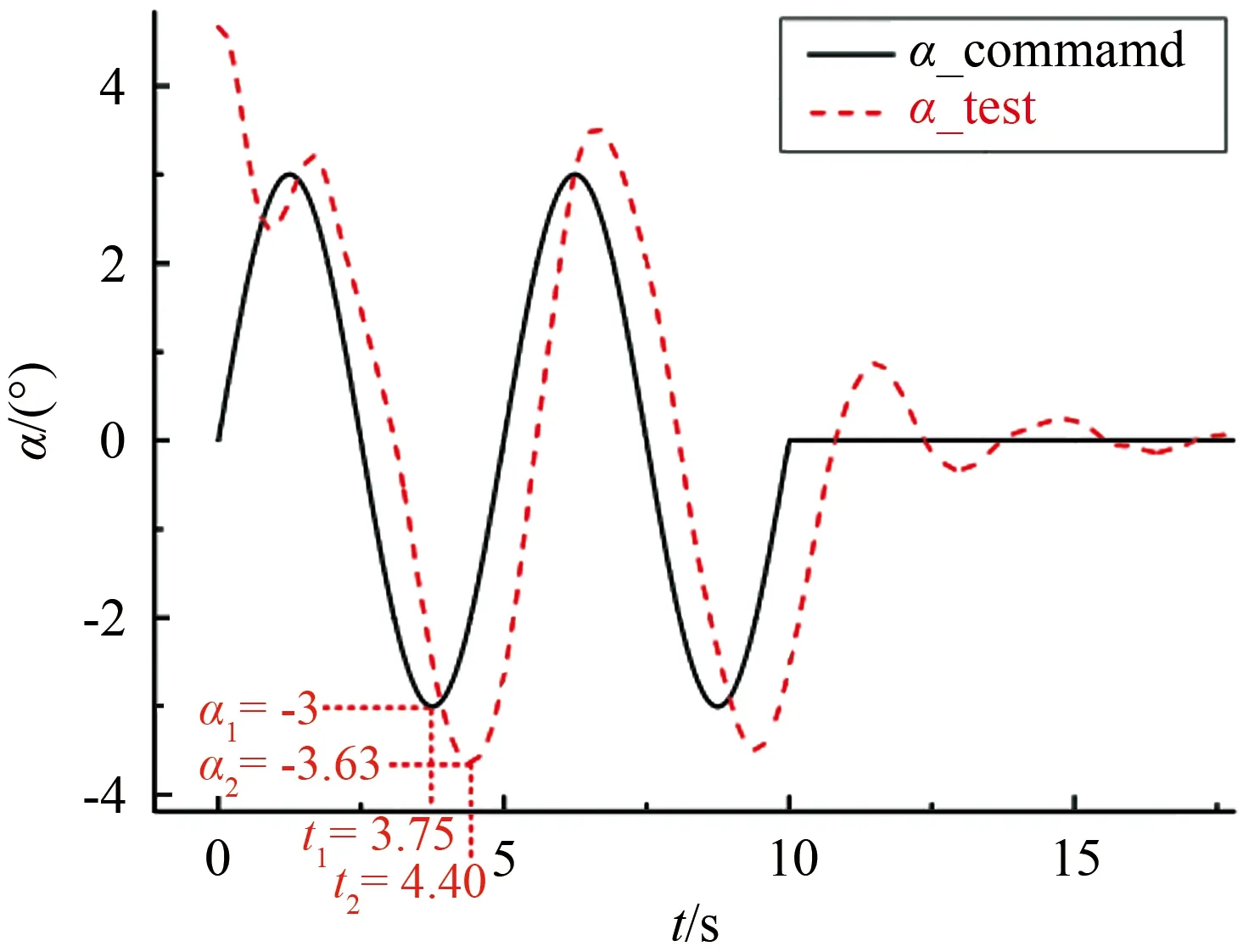
图8 迎角正弦指令跟随性试验曲线
2.3 非定常试验现象
如前文所述,风洞虚拟飞行试验技术主要用于非定常流动区域的飞行器气动特性研究和控制系统验证。本文开展了相关试验,测量到多种非定常试验现象。
2.3.1 大迎角俯仰失稳现象
试验过程中,当迎角α提高到22°以上时,在无控情况下模型发生俯仰极限环振荡,如图9所示。
由试验结果可知,模型在迎角α=22°附近发生迎角极限环振荡现象,振幅约为2.5°。分析试验现象推测:模型背风区表面发生规律的流动分离和再附过程,导致模型俯仰动稳定性降低,从而产生迎角极限环振荡现象。
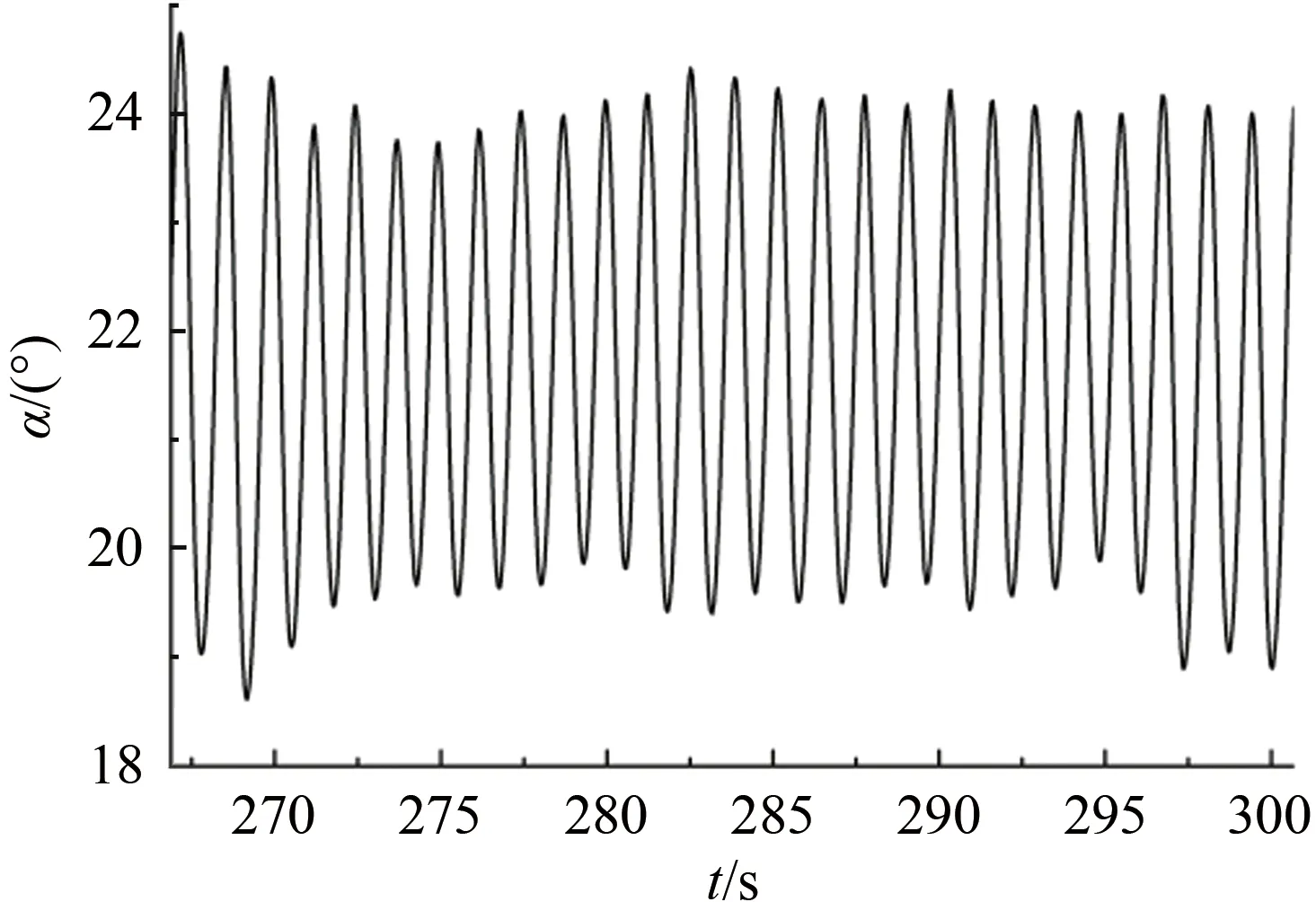
图9 大迎角俯仰失稳现象
2.3.2 负迎角横航向失稳现象
在开展三自由度横航向机动试验时发现:当模型迎角为负时,出现了横航向荷兰滚模态失稳现象。试验曲线如图10~12所示。图中,ωz为偏航角速度,ωx为滚转角速度,δe,L为左平尾偏角,δe,R为右平尾偏角。
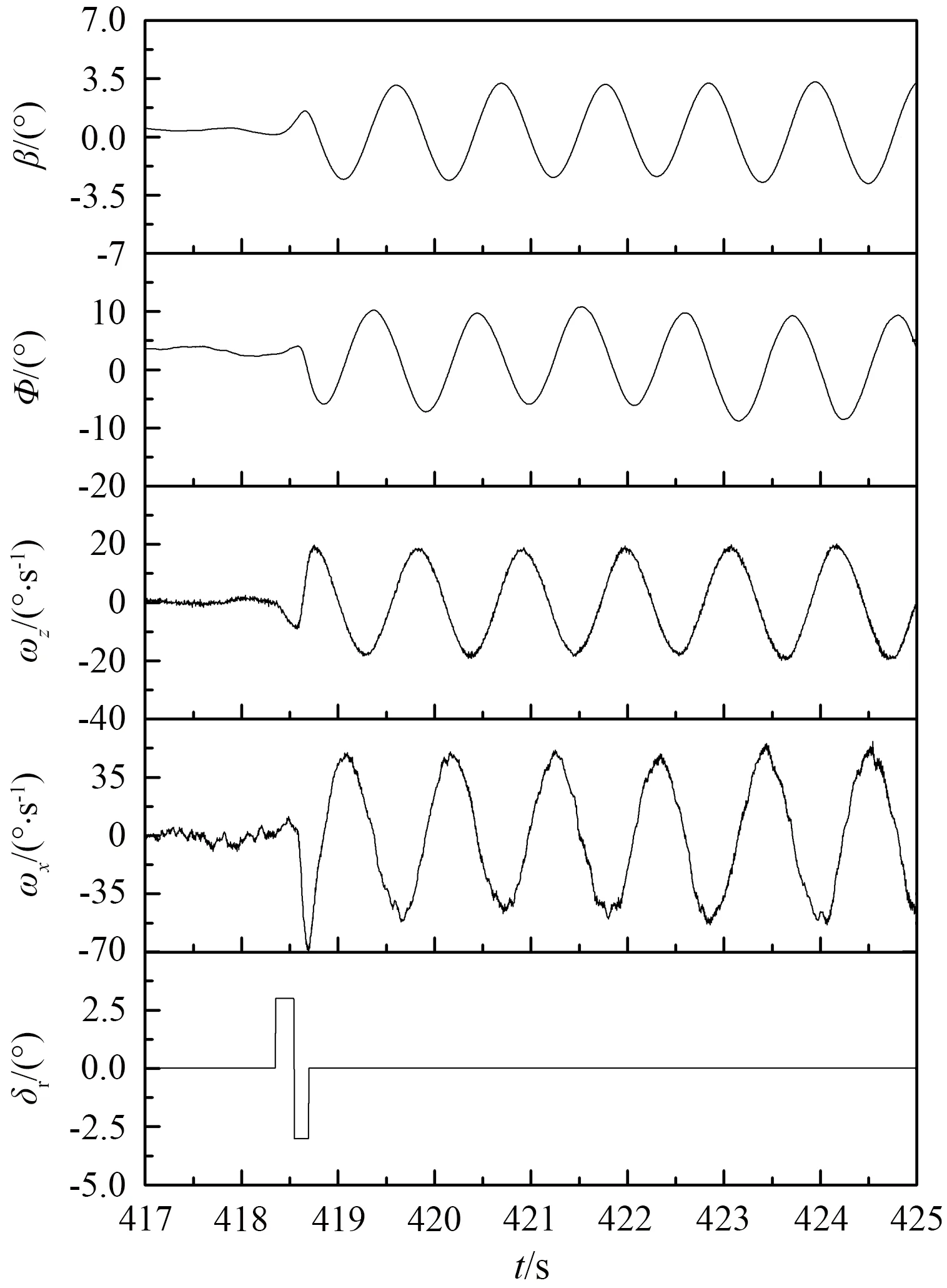
图10 迎角为-5°时横航向失稳现象
当迎角为-5°时,开展了方向舵的对偶机动控制试验,结果导致侧滑角和滚转角发生极限环振荡,侧滑角振幅约为2.5°,滚转角振幅约为5°。当迎角为-7.5°时,开展了副翼(左右平尾差动) 增稳滚转通道的闭环控制试验,此时模型发生横航向运动和副翼控制耦合振荡现象,最终形成极限环振荡,侧滑角振幅约为13°,滚转角振幅约为12°。当迎角增大至-13°时,同样开展了副翼增稳滚转通道的闭环控制试验,此时模型侧滑角迅速发散,在10 s时间内振幅达到了22°,伴随滚转角剧烈振荡至限位附近,同时耦合俯仰方向剧烈振荡。

图11 迎角为-7.5°时横航向失稳现象
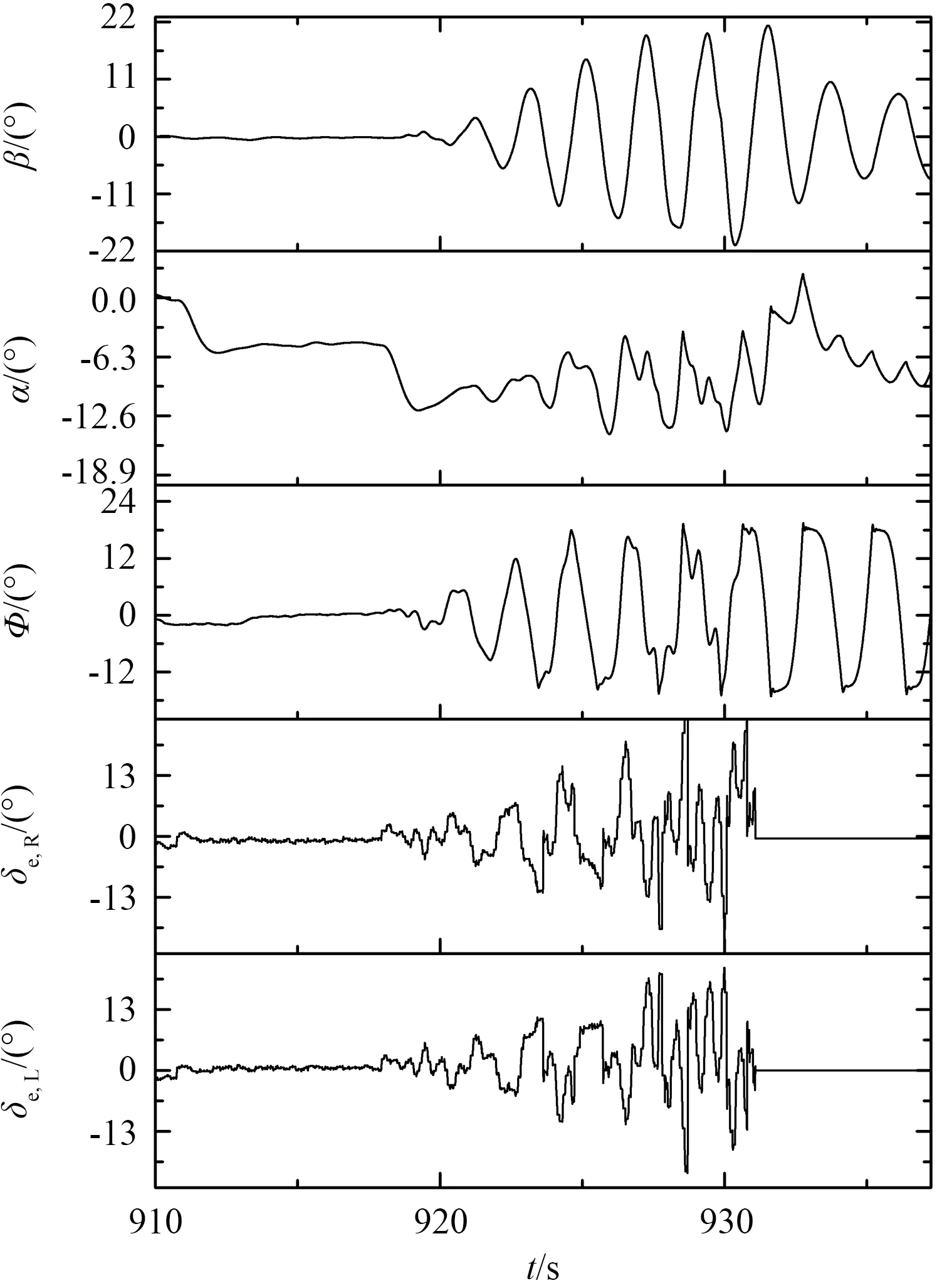
图12 迎角为-13°时横航向失稳现象
分析F-16气动数据[22]发现:在负迎角时,模型处于横向弱静稳定、滚转交叉耦合导数为负(Clr<0) 的滚转动不稳定状态。迎角为-5°无干扰时模型处于中立稳定状态(图10中418 s之前) ;当施加一个扰动(方向舵激励) 后,模型开始作由滚转交叉耦合作用引起的周期性荷兰滚振荡运动,振荡频率为模型荷兰滚自振频率,约为0.91 Hz。当迎角增大至-7.5°时,滚转稳定性进一步降低,此时滚转增稳控制未能抑制荷兰滚发散,并最终与模型运动耦合为稳定的横航向振荡运动,振荡频率约为0.51 Hz。之后在983 s时,通过升降舵控制(δe,L和δe,R同向控制) 改变模型迎角至5°后,模型从横侧向失稳中改出。当迎角为-13°时,滚转稳定性进一步降低,飞行器处于横航向剧烈失稳状态,同时也耦合俯仰方向剧烈振荡。此时的滚转增稳控制也无法抑制三通道耦合运动发散。
3 结 论
本文基于三自由度轴承系统,开展了类F-16模型的低速风洞三自由度虚拟飞行试验。主要结论如下:
(1) 试验系统具备开展非定常流动特性研究试验和控制律验证试验的能力。
(2) 在大迎角试验中测量到俯仰非定常流动失稳现象,负迎角试验中测量到横航向耦合失稳现象。
(3) 负迎角横航向耦合失稳试验表明,滚转增稳控制难以恢复横航向稳定性,且可能发生运动-控制耦合振荡,而通过俯仰控制改变迎角可有效恢复横航向稳定性。
随着航空航天飞行器的不断发展,气动设计与飞行控制设计的关系越来越密切,空气动力学与飞行控制呈现紧耦合发展趋势。本文建立的风洞虚拟飞行试验技术顺应先进飞行器气动-控制耦合研制趋势,不仅可用于军机大迎角静/动态失稳研究、翼摇滚边界试验,也用于控制系统分析及控制律验证及优化测试,为飞行器的气动-控制同步设计提供技术支持。
致谢:感谢中国航天空气动力技术研究院李潜研究员在本文研究中给予的指导与帮助。
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
北京航空航天大学学报(2021年6期)2021-07-20
西部论丛(2020年2期)2020-10-21
学习周报·教与学(2020年25期)2020-10-21
数学学习与研究(2019年5期)2019-05-08
理科考试研究·高中(2017年7期)2017-11-04
现代电子技术(2016年22期)2016-12-26
电脑知识与技术(2016年18期)2016-11-02
大学教育(2016年7期)2016-07-27
考试周刊(2015年12期)2015-09-10
