基于PSO-BP数据融合的环境监控系统设计
2020-03-27 08:12李昌敏熊俊俏
自动化与仪表 2020年3期
李昌敏,熊俊俏
(武汉工程大学 电气信息学院,武汉430205)
民以食为天, 农业发展一直是国家的首要问题,农业的发展直接或间接的影响着国家安全。 传统的温室大棚种植产业,一般情况下都是依靠农民多年的经验,定性地估计各种环境因素对农作物的影响,无法做到科学、合理地判断环境信息,很难进行集中管理,以达到最优化生产的目的[1-2]。 在现有的种植监测中,基本都是对环境因素的单个考虑和调节,但是各个环境因素之间是相互影响的。 如温度就会受到湿度、光照度等因素的影响,因而这种基于单一因素的决策是不合理的;同时作物生长的各要素之间是相互制约的,当其中的某一环境信息发生变化时,与其关联的环境信息也会随之发生改变。 因此,如果能够将测量到的因素经过有效的融合,得到一个全面而准确的决策,更有利于温室的控制。
基于上述, 提出一种基于PSO-BP 算法的决策系统。 该系统能对大棚内的环境信息的进行实时采集和传输。 采用克里金插值法构建环境的分布图,利用ECDS 算法对大棚内节点进行精确能量控制。同时改进BP 神经网络进行数据融合, 能够实现系统的自主科学决策。 决策信息通过反馈调节系统控制大棚内的环境,使农作物一直处于最佳的生长环境。 设计实现了对大棚环境的自动监测、反馈调控,对推动我国农业全自动化有着重要的意义。
1 系统总体设计
环境监控系统框架如图1 所示。 主要包括三部分:传感器对数据的采集、系统对数据的分析决策和反馈调节设备。 在大棚内部署适量的节点,每个节点上连接4 种传感器:温湿度传感器、pH 传感器、光照强度传感器, 用来采集温室大棚内的环境信息。 然后将采集的数据通过ZigBee 网络传输至网关,网关的功能是将接收到的数据信息通过互联网转发至服务器, 最后在服务器数据进行处理和分析。 其中服务器运行着分析决策系统,根据采集到的大棚4 种环境信息做出科学的决策。 最后服务器将决策结果通知大棚内调节系统,控制温室内设备自动运转,例如启动滴灌等,在大棚内形成一个完整的控制闭环回路。
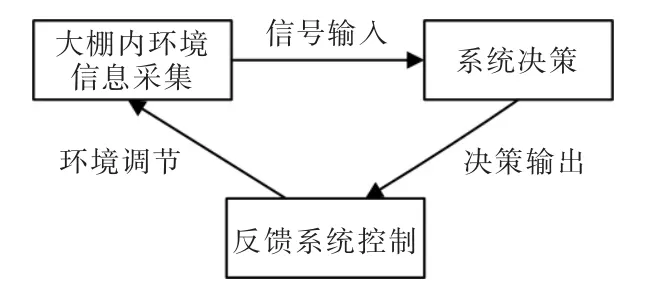
图1 环境监测系统结构Fig.1 Structure of environmental monitoring system
2 硬件设计
硬件设计主要分为两部分:传感器节点设计和ZigBee 通信模块设计。 在传感器节点上安装传感器用以采集和存储环境信息。 ZigBee 模块选用了CC2530 芯片进行组网通信,它具有低功耗、安全可靠、自组网等优点。
2.1 传感器节点
传感器是一种检测装置, 能感受物理界的信息,并能将感受到的信息按一定规律变换成为电信号输出,同时它也是本系统获取环境信息的源头[3]。本设计用到的传感器有温湿度、pH 值、 光照强度。图2 为传感器节点结构。
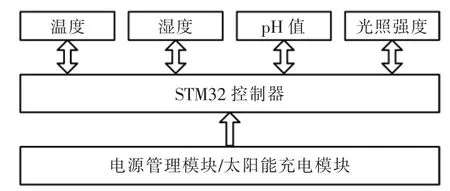
图2 节点结构Fig.2 Node structure
结构中电池模块负责给控制器供电,STM32 控制器通过遍历传感器,每分钟采集一次信息。 通过ECDS 算法对路由节点的配置可大大延长整个系统的使用时间。 STM32 单片机通过串口连接各传感器,采集大棚内环境信息。 并将数据封装成数据帧,通过ZigBee 无线网将数据帧发送到网关,最后上传至服务器。 如图3 所示为传感器采集信息。
图3 传感器信息采集Fig.3 Sensor information collection
2.2 ZigBee 组网设计
本次设计为了提高网络通信效率、减少冗余传输,利用ECDS 算法构建ZigBee 网络[4-5]。 选择其中一些节点作为整个网络的路由节点,称其为骨干节点。 打开骨干节点的通信功能,关闭其他节点的通信功能。 这些骨干节点构建一个最小连通集网络来负责数据的路由转发, 这样可以保证通信覆盖度,并降低能耗。 ZigBee 组网结构如图4 所示。
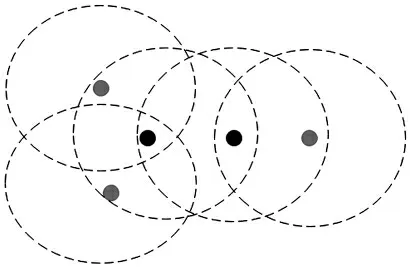
图4 ZigBee 组网原理图Fig.4 ZigBee network diagram
ECDS 算法:为每个节点分配一个权值,假设节点i 的权值数表示为w(i),这个值的大小是根据节点剩余能量和在网络图中的有效度数来计算的。 节点权值的计算方法如下:

f 函数是以电池剩余能量energy(i),节点稳定性stability(i)和节点的有效度数effective_degree(i)为参考函数。
通过计算出节点的值,具有较大值的节点有较高的能力。 能量越高、覆盖越多邻居节点,越适合担当骨干网节点。 通过为网络节点设置这样的优先级之后,算法构建的支配集不仅考虑了支配集规模的大小,同时把能量也考虑进去了,这样的系统作为传感器节点更为合理。
3 环境信息分布的研究
本系统对4 种环境信息进行采集。 这些信息如果不借助系统分析,很难直观地了解它们的分布情况,就很难实现大棚的有效管理。 本设计根据采集的环境信息值,结合Kriging 插值算法构建环境分布图,直观展现了环境信息。
Kriging 插值算法在进行插值预测前,我们需要得到半变异函数。 根据两节点之间的距离和节点对应环境信息。 计算经验半变异函数:

式中:h 为两节点间距离;N 为样本;z(xi)和z(xi+h)在分别代表节点i 和节点i+h 采集到的信息。 根据式(2)得到散点图,利用最小二乘法得到半变异函数,如图5 所示。 当变异函数接近半变异函数时,选择该模型作为Kriging 的预测模型。
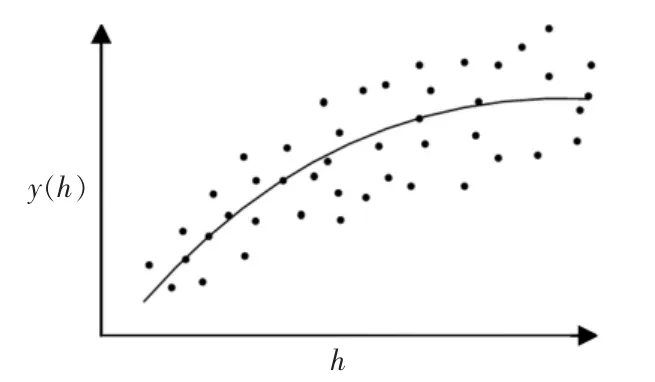
图5 模型构建图Fig.5 Model building diagram
模型中根据各节点采集的信息可进行插值预测。 假设x0是所研究区域的一点,z(x0)是该点的测量值,假设距离待预测位置x0最近的n 个节点在t时刻采集的环境因子值分别为z(xi),i∈[1,n],则位置x0处的估计值z*(x0)计算方法如下:

式中:n 为待预测点附近的n 个监测点;λi为第i 个节点对应的权值;z(xi)为第i 个节点采集的信息。
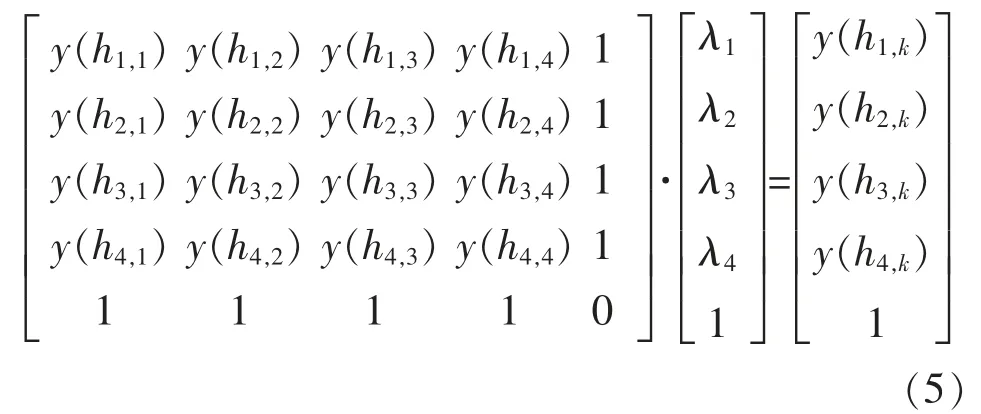
在算法中估计值z*(x0)的好坏取决于权重值λi。λi必须满足2 个条件:①z*(x0)的偏差数学期望为0;②估计值z*(x0)和实际值z(xi)之差的平方和最小。 计算方法如下:

具体流程如下: 假设k 号位置是待预测位置,周围有4 个传感器节点。首先建立Kriging 模型计算y(hi,j),其中hi,j表示节点i 和节点j 之间的距离;然后根据式(4)的变换式(5)计算每个已知样本节点的权值。 根据式(3)即可预测出位置k 处对应的环境因子值。
根据大棚内已有的节点位置,对尚未安装节点的区域进行预测,得到该区域所对应的环境信息,最后利用这些环境信息得到环境因子的整体分布图。
4 PSO-BP 融合算法
由于一般的BP 神经网络算法收敛速度慢、易陷入局部最优,而PSO 算法收敛速度快、全局搜索性强。 因此,本系统将PSO 算法与BP 算法进行融合,优化BP 神经网络,使得优化后的算法有更好的优化能力和映射能力[6]。 PSO-BP 算法能对环境特征参数进行有效融合,精确判断出大棚内的真实情况。
4.1 标准粒子群算法
PSO 初始化为一群随机粒子,然后通过不断迭代,更新最优的速度和位置,直到最优解。 PSO算法是一种基于速度-位置搜索模型[7],其在D维解空间中,有n 个粒子,群体中第i 个粒子的位置,速度1,2,3,…,n。将xi带入函数可得到其适用值。更新最优位置: 设第i 个粒子的最优位置为pi=, 整个粒子群搜索到的最优位置为粒子状态更新操作如下:
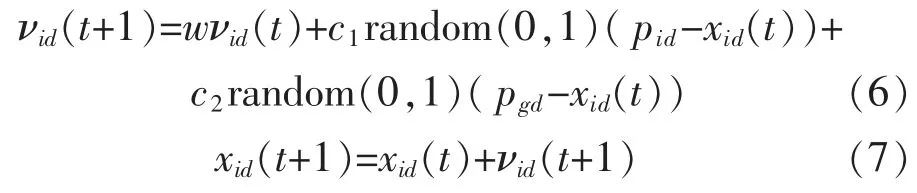
式中:i=1,2,…,n;d=1,2,…,D;C1,C2为加速度因子,通常取C1=C2=2;w 为惯性因子,其值为非负,该值可以对局部和全局寻优能力进行调整, 取值为0.1~0.9,取最大迭代次数Tmax=1500。
4.2 PSO 算法优化BP 算法
已知BP 算法由大量神经元组成,有三层机构:输入层、隐含层和输出层,如图6 所示。 算法每次根据训练得到的结果与预想结果进行误差分析,进而修改权值和阈值,一步一步得到能输出和预想结果一致的模型[8]。 利用PSO 算法训练BP 网络时,优化后的算法具有良好的映射能力和优化能力。 算法首先初始化粒子, 然后利用训练误差作为适应度函数,并记录当前最优位置和全局最优位置。 不断更新直到找到最优的位置,用其作为最优权值和阈值来对BP 网络进行训练。 输入输出的均方差指标J用最小二乘法表示。

式中:N 为样本数量;o 为输出神经元的个数, 这里取4;J 为第i 个样本的第j 个网络输出节点的样本值;yj,i为网络输出节点的实际输出值。
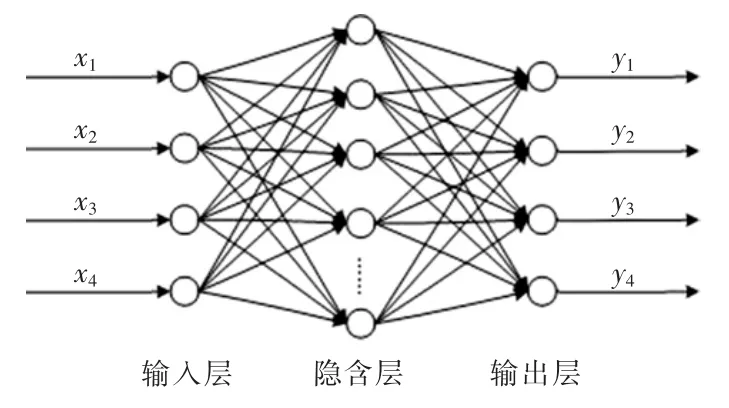
图6 BP 网络结构图Fig.6 BP network structure diagram
利用PSO 算法对BP 神经网络进行训练, 避免了BP 算法中初始权值和阈值对整个模型的精度和运行速率的影响。 PSO 优化BP 神经网络的流程如图7 所示。
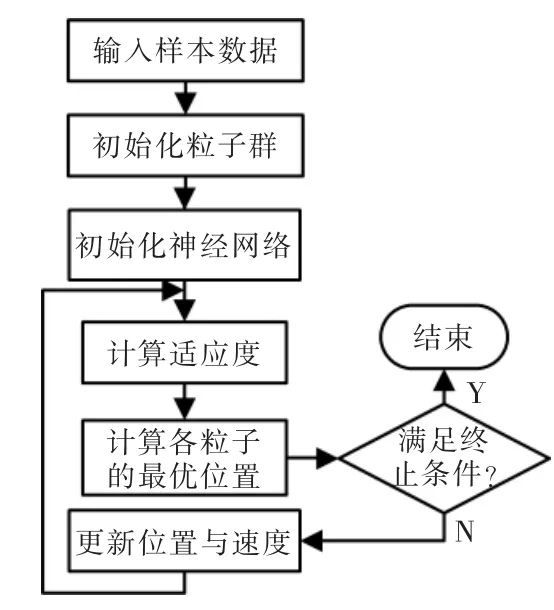
图7 PSO-BP 混合算法流程Fig.7 PSO-BP hybrid algorithm flow chart
4.3 PSO-BP 模型的建立
本设计建立的PSO-BP 神经网络模型, 输入层有4 个节点为4 种环境因素, 输出层有4 个节点。隐藏层有12 个节点, 由公式得到,m是输入层节点数,n 是输出层节点数,a 为随机数。利用PSO 优化BP 网络的权值和阈值[9],为了消除输入输出在数量级上的差异,让模型更具泛化能力。 对输入、输出值进行归一化处理。 其公式为

式中:xmax是输入变量的最大值;xmin是输入变量的最小值;xt,xt′为输入样本归一化前后的值。
4.4 仿真结果
在仿真实验中,我们以温室大棚黄瓜为例。 黄瓜的最适宜生长温度为22 ℃~32 ℃, 相对湿度为60%RH~85%RH, 一般喜欢pH 5.5~7.2 之间的土壤,黄瓜是日照中性植物,有较高的光饱和补偿点。
建立的模型中输入量分别是x1(温度)、x2(湿度)、x3(pH 值)、x4(光照强度)。 输出量为y1(光照度不足)、y2(温度偏高)、y3(pH 值不足)和y4(湿度偏低)4 种状态。 网络训练后实际上的输出结果送到分析结构进行决策,并判断温室的环境状况。 实验选取了几组典型数据对PSO-BP 优化算法进行训练,其中编号为1、2 的样本表示温度偏低,编号为3、4的样本表示湿度偏低,编号为5、6 的样本表示光照度不足,编号为7、8 的样本表示pH 值偏低。 将网络训练后的实际输出结果送到判别模块进行判别,判断温室大棚内的环境状况。 仿真结果如表1所示。
通过仿真对比可知,实验的结果非常接近预期结果,PSO-BP 网络找到了预期的输入输出映射规律, 其规律隐含在整个神经网络的权值和结构当中。 实验结果显示改进后的BP 算法达到了预期目的,能够有效地提高温室管理的精确性。
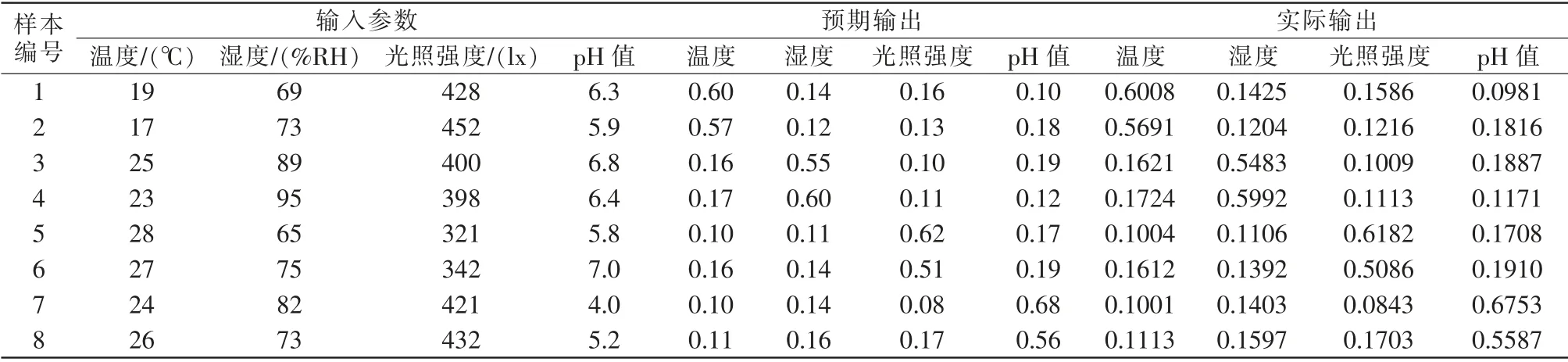
表1 仿真结果输出对照表Tab.1 Simulation result output comparison table
5 结语
本文以温室种植黄瓜为例。 针对目前温室大棚的研究中存在的不足的地方,设计一种基于PSO-BP融合算法的智慧大棚监控系统。 系统首先利用ZigBee 协议提出无线传感器组网结构, 再利用ECDS 算法合理分配骨干节点,节省传输能耗,延迟网络使用时间。 并在温室内部署适量的检测节点用于采集和传输环境信息。利用Kriging 插值算法预测未布置节点区域的环境信息,并构建环境信息分布图,用于直观显示环境状况。 最后使用决策系统得到温室决策结果,通过反馈控制系统调节大棚内环境。 本系统最主要的是利用了PSO-BP 神经网络进行数据融合,可以有效地监测并给出作物环境的决策结果。 经实验验证,本设计在整体性能上表现优越,降低了能耗,提高了温室控制的准确性。
猜你喜欢
音乐天地(音乐创作版)(2022年6期)2022-10-14
今日农业(2022年16期)2022-09-22
今日农业(2022年16期)2022-09-22
成都信息工程大学学报(2022年3期)2022-07-21
农业工程技术(2022年1期)2022-04-19
云南农业(2021年9期)2021-09-24
云南农业(2021年8期)2021-09-06
邮电设计技术(2021年2期)2021-03-13
今日农业(2020年15期)2020-09-25
英语文摘(2019年2期)2019-03-30