
组合动力运载器返回段轨迹设计建模研究
2020-03-27 08:15:02高华宇石宝兰刘佳佳
导弹与航天运载技术 2020年1期
韩 璐,高华宇,石宝兰,刘佳佳
组合动力运载器返回段轨迹设计建模研究
韩 璐,高华宇,石宝兰,刘佳佳
(北京宇航系统工程研究所,北京,100076)
为克服当前已有升力式航天器再入模型的不足,建立适应于下面级组合动力运载器的返回段轨迹设计模型,对下面级组合动力运载器返回段轨迹特点和设计难点进行了分析,并针对此类飞行器返回过程中初始状态散布大、返回过程需进行机动转弯和冲压模态动力巡航、各阶段轨迹设计要求各异的问题,在转弯段以运载器速度为积分变量,通过引入方位-视线角偏差标志转弯终点,能够有效处理组合动力运载器返回过程各类约束。该模型计算结果符合组合动力运载器返回段轨迹特点和任务需要,能够满足此类运载器返回段轨迹设计要求。
组合动力运载器;返回段;轨迹设计建模;机动转弯
0 引 言
随着人们探索太空脚步的不断加快,近年来水平起降可重复使用运载器(Reusable Launch Vehicle, RLV)正受到越来越多的关注[1,2]。下面级组合动力主要包括某组合动力(Rocket-Based Combined Cycle,RBCC与Turbine-Based Combined Cycle,TBCC)等。RLV能够在亚轨道以一定的速度投送上面级,完成投送任务后利用其动力系统返回并降落于原发射场。
相比传统无动力再入RLV,下面级组合动力RLV返回段轨迹设计存在以下难点:
a)传统无动力再入RLV横向机动范围需求小。而为了返回指定发射场,下面级组合动力RLV返回时需进行大范围的机动转弯,转弯段航向角改变存在超过180°,甚至达到接近360°的可能,转弯机动发生在较大范围的三维空间,剩余航程难以准确估计;
b)下面级组合动力RLV返回时需利用冲压模态进行巡航飞行,当飞行状态不满足冲压模态工作条件时,组合动力系统需利用其他模态(如引射模态、纯火箭模态等)调整飞行状态。
针对RLV的再入返回轨迹设计和规划方法,学者们开展了长期研究。美国的航天飞机采用了阻力加速度剖面规划再入轨迹的标称轨迹法[3,4]。Mease将航天飞机的二维纵向再入制导律推广到三维,提出了一种基于降阶模型的在线阻力加速度以及侧向加速度参考剖面生成的规划方法[5~7]。陆平提出了一种在线轨迹生成方法[8,9],在拟平衡滑翔假设条件下,将不等式约束转化为对倾侧角幅值约束,简化了再入轨迹生成过程。然而,由于下面级组合动力RLV返回初始能量无法保证无动力返回着陆场,需要启动冲压发动机进行动力巡航,且下面级组合动力RLV转弯段剩余航程难以准确估计,而以上方法[3~9]均需要对剩余航程进行预先估计,无法直接应用于组合动力RLV返回轨迹生成。此外,目前对组合动力RLV轨迹设计的研究主要针对上升段[10~12],对其返回段轨迹设计研究不足。
综上所述,当前飞行器再入轨迹设计建模方法存在一定的局限性,无法完全应用于下面级组合动力RLV返回段轨迹设计。本文以下面级组合动力RLV为研究对象,针对RLV特点及返回轨迹设计中的特殊问题,提出了适应于下面级组合动力RLV的返回轨迹设计方法,并以此类RLV典型参数为算例,验证了方法的可行性。研究旨在根据组合动力RLV返回时的特殊问题,以及当前方法的不足,建立满足所有约束,且符合此类RLV使用特点的返回段轨迹设计方法和模型,从而为此类新型飞行器返回段轨迹设计提供新的思路与方法。
1 问题描述
下面级组合动力RLV完成亚轨道投送任务后转入返回段飞行,返回段典型任务剖面如图1所示。
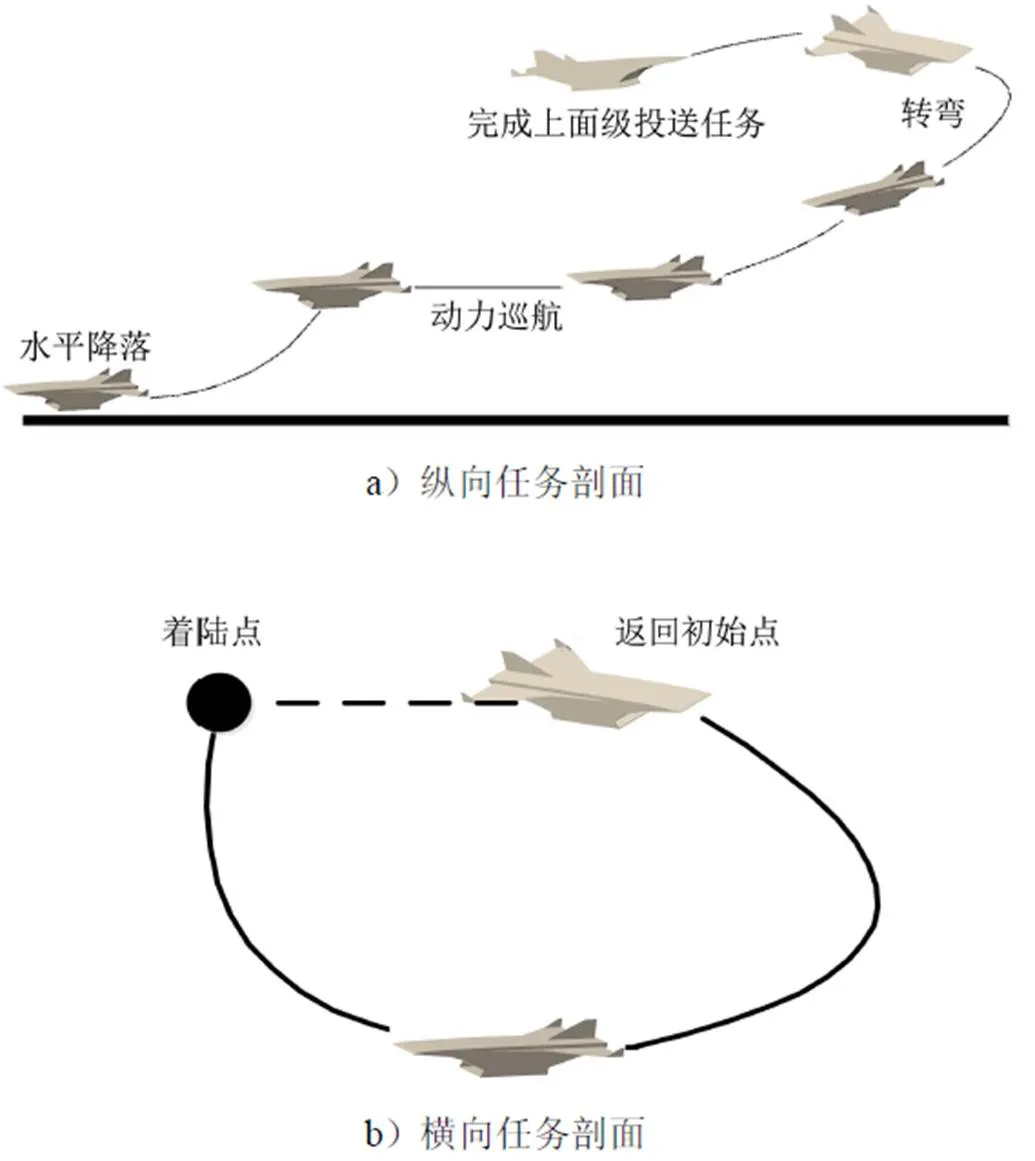
图1 下面级组合动力RLV返回任务剖面
由于组合动力RLV与上面级分离时往往动压较小,气动力不足以使RLV速度产生明显变化,需要通过降低高度,使RLV平稳过渡至转弯段。当RLV拥有足够的动压时,进行机动转弯。RLV必须在满足所有力热环境约束的同时,尽可能使得终端飞行方向指向临时确定的着陆点;当RLV能量不足以抵达着陆场时,需要冲压模态工作以维持能量;而在转弯结束时,RLV所处飞行状态往往不能保证满足冲压模态工作条件,因此,需要利用其他模态调整飞行状态。综上,组合动力RLV返回过程各阶段各具特点且约束众多,与当前升力式再入航天器存在较大差别。根据以上分析,将组合动力RLV的返回轨迹分为返回初段、转弯段、过渡段、动力巡航段和预末端能量管理(Terminal Area Energy Management,TAEM)段。
2 数学模型
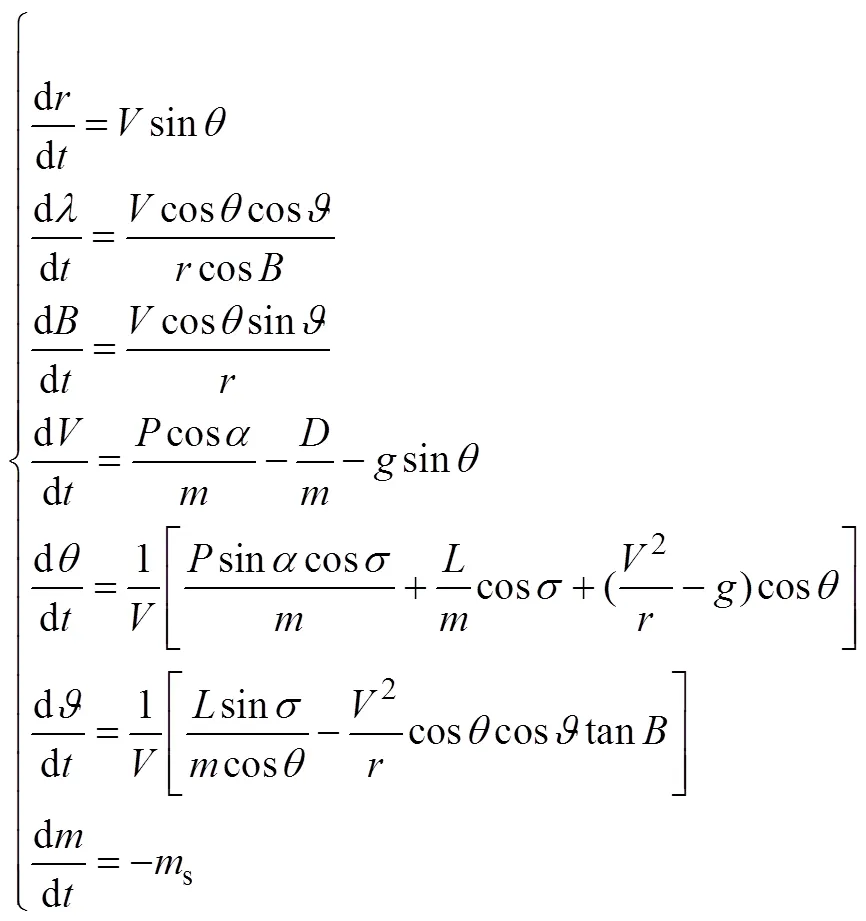
2.1 动力学模型
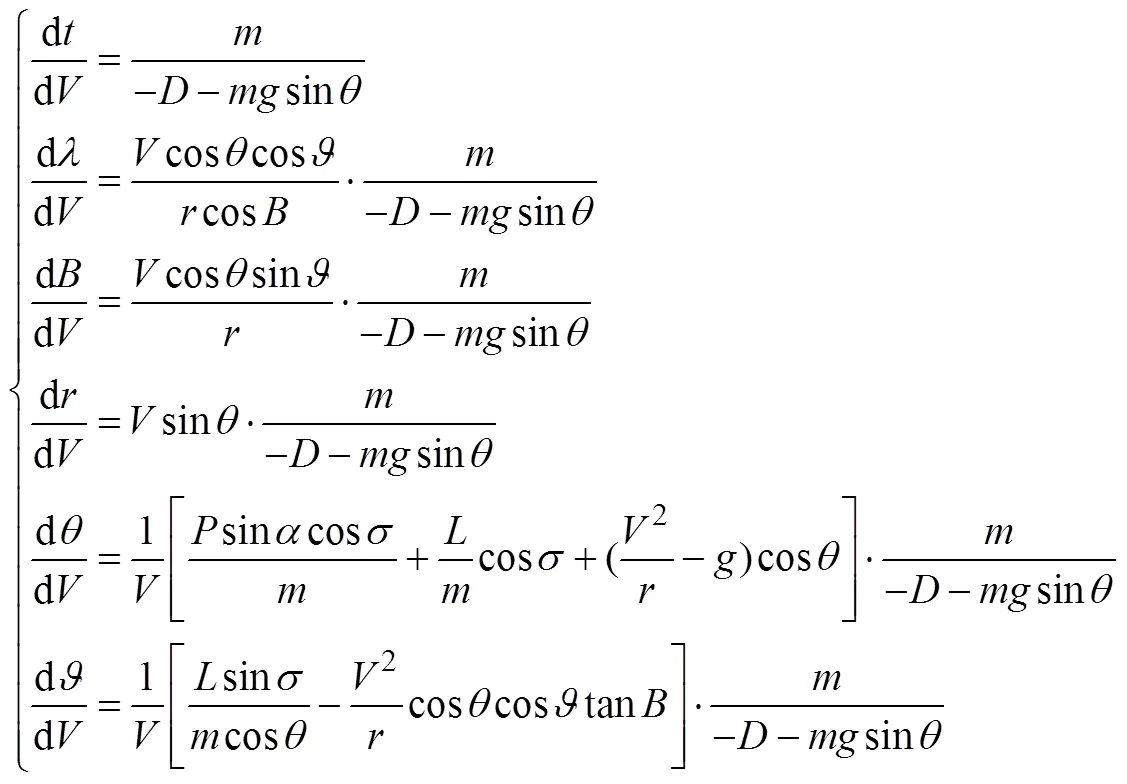
下面级组合动力RLV返回段动力学方程为
2.2 约束条件
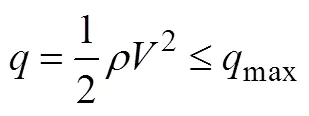
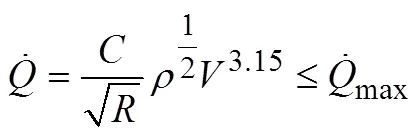
a)过程约束。
下面级组合动力RLV返回过程中主要过程约束包括:动压约束、法向过载约束、热流约束,此外转弯过程中需满足拟平衡滑翔条件(Quasi-equilibrium Glide Condition,QEGC)。约束条件分别为

b)终端条件约束。
组合动力RLV返回段终止于相距着陆点一定距离的某个界面上,即末端能量管理界面。在TAEM界面,再入轨迹必须满足一定的条件,从而保证TAEM段轨迹和最后着陆段轨迹的生成。这些条件构成了返回轨迹的终端约束条件:

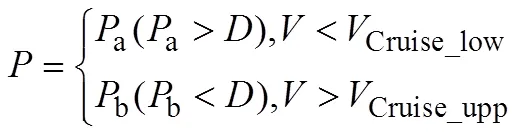
c)冲压发动机启动窗口。
在RLV返回时,由于亚燃冲压模态比冲最高,因此当RLV能量不足时,应以亚燃冲压模态巡航飞行。为保证动力系统能够在巡航状态点附近正常启动,需要为前段轨迹引入末端条件约束,称该约束为冲压模态“启动窗口”。冲压模态启动窗口由高度、速度和攻角条件构成:

式中 下标low和upp分别表示约束下限和上限。
2.3 轨迹设计模型
在进行组合动力RLV轨迹设计时,对不同的阶段,采用不同的轨迹设计模型。
a)返回初段。

计算过程中不断检验式(8),若条件满足,则轨迹可平滑过渡至QEGC段,返回初段也随之结束。
b)转弯段。




在RLV的转弯过程中,RLV的速度单调减小。且转弯段初始速度可由返回初段计算得到,转弯段终端速度可根据飞行器的升阻比事先确定,因此速度可用作转弯段轨迹设计的积分变量。将方程转换成以速度为积分变量,可得:
为转弯段轨迹设计的倾侧角随速度变化剖面如图2所示。倾侧角剖面共由3段构成,分别如图中(b)(c)(d)所示,图中(a)表示返回初段的常值倾侧角剖面。由于在过渡段倾侧角为0°,故转弯段末端倾侧角为0°。为尽量减小转弯半径,使转弯段前半段倾侧角尽量靠近边界,,参数根据具体飞行器不同的升阻比离线设计,如图中(c)所示。(c)与转弯段初始和终点处倾侧角值通过直线(b)和(d)连接。其中,直线(b)以(a)的终值为起点,为斜率。直线(d)与(c)相交于速度处。但考虑到如果较大,会使得运载器在转弯段末端长时间违背QEGC,因此可在附近取速度代替。
c)过渡段。
转弯段结束后,需将速度、高度等参数调整到冲压模态启动窗口。经过转弯段,RLV速度方向已经指向着陆点,应尽量不引入侧向运动。
转弯段结束后,当RLV速度大于动力巡航速度时,RLV进入无动力等高飞行段;当RLV速度小于动力巡航速度时,需要RLV利用引射火箭或涡轮发动机进行加速。
当过渡段结束时,如果RLV满足冲压发动机启动窗口要求,便进入动力巡航段,由冲压发动机提供动力。
d)动力巡航段。
RLV在动力巡航段采用等高巡航飞行方案,对飞行速度进行反馈控制,以使速度保持在一定的范围内。飞行时为避免侧向运动,采用攻角进行高度控制,而燃油当量比则作为速度控制量。


e)预TAEM段。
为了将下面级组合动力RLV从动力巡航段结束状态导引至TAEM界面,引入预TAEM段,方法见文献[9],其中RLV在预TAEM段纵向依靠调整倾侧角大小跟踪“高度-速度”标准剖面,而在侧向则依靠调整反转位置消除末端航向偏差。
3 算例与分析
某组合动力(RBCC)运载器返回初始条件为:初始质量60 t,高度60 km,速度=14,距发射场纵向距离1250 km,横向距离0 km,航迹角5°,航向角0°。TAEM界面条件为:高度15 km,速度750 m/s,距离目标着陆场30 km。计算结果如图3至图8所示。
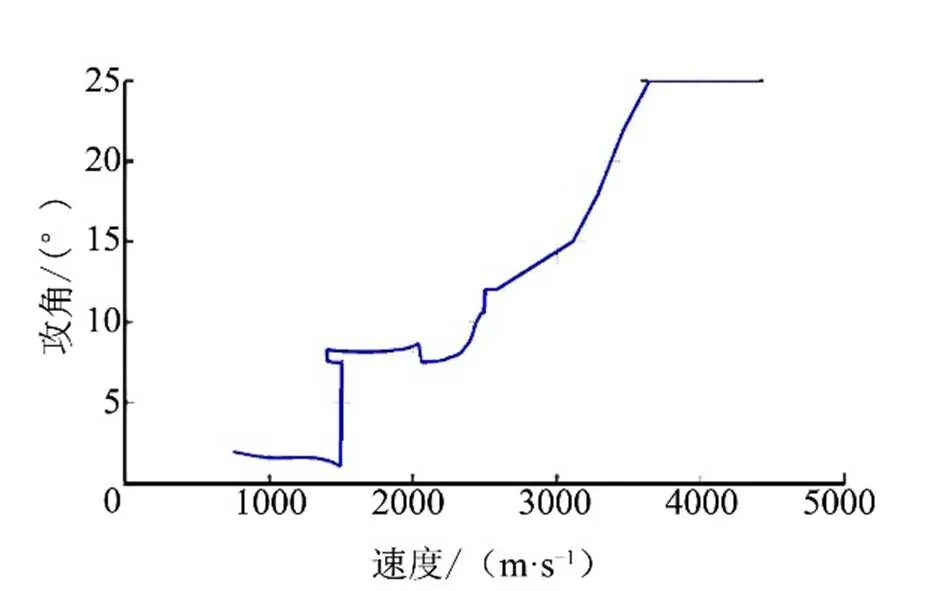
图3 攻角曲线

图4 倾侧角曲线
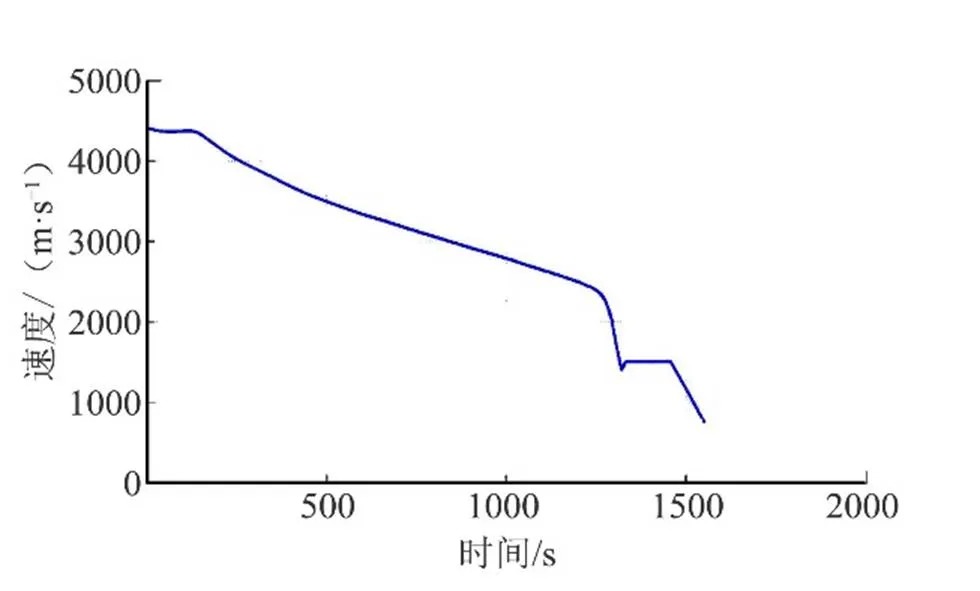
图5 速度曲线

图6 纵程-高度曲线
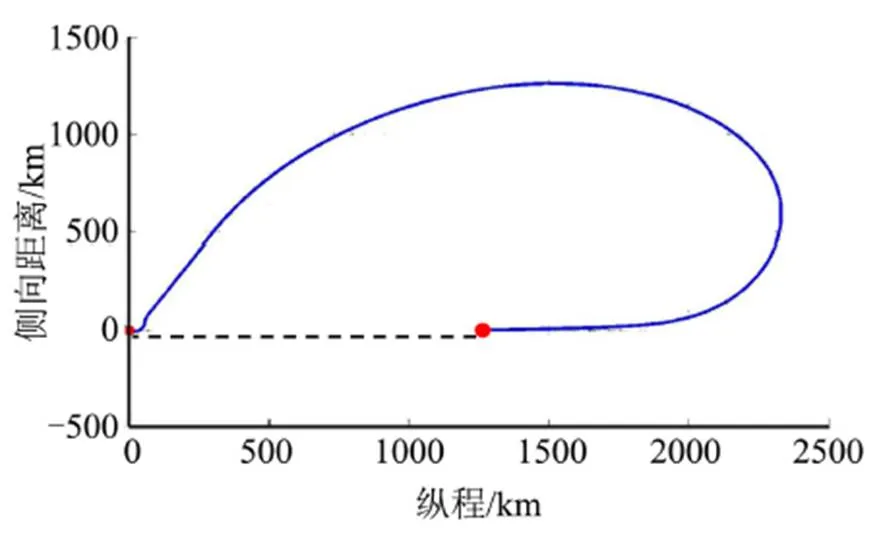
图7 纵程-侧向距离曲线

图8 速度-高度曲线

4 结 论
本文针对下面级组合动力RLV工作特点和任务要求,总结了返回段轨迹设计的特殊性以及当前已有求解模型的不足,建立了适应于下面级组合动力RLV的返回轨迹设计模型,并通过算例验证了方法和模型的正确性。经研究得出以下结论:
a)该模型根据RLV特点,在转弯段以速度为积分变量,通过引入方位-视线角偏差参数标志转弯段起始点与终止点,克服了现有方法的不足,可以满足RLV返回轨迹生成要求;
b)算例结果满足RLV返回过程所有约束条件和任务要求,验证了方法的正确性;
c)本文所建立轨迹设计模型能够适用于组合动力RLV及其他采用火箭或冲压发动机的下面级RLV,适用范围广。
[1] 陈宏, 何国强. RBCC和TBCC组合发动机在RLV上的应用[J]. 火箭推进, 2008, 34(3): 39-43.
Chen Hong, He Guoqiang. Application of RBCC and TBCC engines to RLVs[J]. Journal of Rocket Propulsion, 2008, 34(3): 39-43.
[2] 崔乃刚, 等. 垂直起降可重复使用运载器发展现状与关键技术分析[J]. 宇航总体技术, 2018, 2(2): 27-42.
Cui Naigang, et al. Development and key technologies of vertical takeoff vertical landing reusable launch vehicle[J]. Astronautical Systems Engineering Technology, 2018, 2(2): 27-42.
[3] Harpold J C, Graves C A Jr. Shuttle entry guidance[J]. Journal of the Astronautical Sciences, 1979, 27(3): 239-268.
[4] 赵汉元. 飞行器再入动力学和制导[M]. 长沙: 国防科技大学出版社, 1997.
Zhao Hanyuan. Dynamics and guidance for reentry vehicles[M]. Changsha: National University of Defense Technology Press, 1997.
[5] Mease K D. Reduced-order entry trajectory planning for acceleration guidance[J]. Journal of Guidance, Control and Dynamics, 2002, 25(2): 257-266.
[6] Mease K D. Design and evaluation of an acceleration guidance algorithm for entry[J]. Journal of Spacecraft and Rockets, 2004, 41(6): 986-996.
[7] Leavitt J A, et al. Performance of evolved acceleration guidance logic for entry(Eagle)[C]. California: AIAA Guidance, Navigation, and Control Conference and Exhibit, 2002.
[8] Lu P. Closed-form control laws for linear time-varying systems[J]. IEEE Transactions on Automatic Control, 2000, 45(3): 537-542.
[9] Shen Z J, Lu P. Onboard generation of three-dimensional constrained entry trajectories[J]. Journal of Guidance, Control, and Dynamics, 2003, 26(1): 111-121.
[10] 龚春林, 等. 适应于RBCC运载器的轨迹优化建模研究[J]. 宇航学报, 2013, 34(12): 1592-1598.
Gong Chunlin, et al. Research on modeling of trajectory optimization for RBCC-powered RLV[J]. Journal of Astronautics, 2013, 34(12): 1593-1598.
[11] 龚春林, 韩璐. RBCC可重复使用运载器上升段轨迹优化设计[J]. 固体火箭技术, 2012, 35(3): 290-295.
Gong Chunlin, Han Lu. Optimization of ascent trajectory for RBCC-powered RLV[J]. Journal of Solid Rocket Technology, 2012, 35(3): 290-295.
[12] 闫晓东, 等. RBCC动力飞行器等动压爬升方法[J]. 固体火箭技术, 2013, 36(6): 710-714.
Yan Xiaodong, et al. An ascent trajectory design method with constant dynamic pressure for RBCC powered vehicle[J]. Journal of Solid Rocket Technology, 2013, 36(6): 710-714.
Research on Modeling of Flyback Trajectory Design for Combined-Propulsion-Powered RLVs
Han Lu, Gao Hua-yu, Shi Bao-lan, Liu Jia-jia
(Beijing Institute of Aerospace Systems Engineering, Beijing, 100076)
In order to overcome the disadvantages of current methods, and to build a new model of flyback trajectory design for Combined-Propulsion-Powered RLVs, the characteristics and design problems of flyback trajectory of the lower-stage Combined-Propulsion-Powered RLVs are analyzed. In flyback phase, the initial condition of this sort of RLVs is scattered over a wide area, and the large transverse range turning and cruising powered by ramjet mode is required. The trajectory design requirements of different phases are different. To solve the problems above, the disadvantages of current methods are overcome by imposing the angular deviation of azimuth to sight with the velocity used as the integration variable in turning phase, and all the constraints can be imposed and satisfied. The result shows that the model accords with the characteristics of flyback trajectory and satisfies the mission requirements, and the new model can be used in flyback trajectory design for this sort of RLVs.
combined-propulsion-powered RLVs; flyback trajectory; model of trajectory design; large transverse range turning
V475.9
A
1004-7182(2020)01-0033-0
10.7654/j.issn.1004-7182.20200106
2019-01-21;
2019-03-17
韩 璐(1989-),男,工程师,主要研究方向为飞行器总体设计。
高华宇(1983-),男,高级工程师,主要研究方向为飞行器总体设计。
石宝兰(1988-),女,工程师,主要研究方向为飞行器总体设计。
刘佳佳(1984-),男,高级工程师,主要研究方向为飞行器总体设计。
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19 11:35:10
装备制造技术(2020年9期)2021-01-26 00:14:34
中国空间科学技术(2020年4期)2020-12-01 02:35:12
电子制作(2018年2期)2018-04-18 07:13:25
中国科技博览(2016年1期)2016-04-25 14:07:30
船海工程(2015年5期)2016-01-18 10:40:40
小朋友·快乐手工(2015年5期)2015-06-06 00:46:12
世界制造技术与装备市场(2015年6期)2015-02-28 22:20:24
科技传播(2013年22期)2013-10-17 11:16:36
轴承(2010年2期)2010-07-28 02:25:52
