
基于STM32和TMS320的配电网作业机器人控制系统
2020-03-26 08:50杨翔宇樊绍胜张申毅崔坤坤
仪表技术与传感器 2020年2期
杨翔宇,樊绍胜,张申毅,崔坤坤
(长沙理工大学电气与信息工程学院,湖南长沙 410114)
0 引言
随着社会经济的快速发展,人民生产生活对于电力需求的依赖性越来越高[1-2]。配电网处于电力系统末端,是保证电力持续供给的关键环节,其可靠性在整个供电系统中占有非常重要的位置。由于配电网系统多为辐射状拓扑结构,当线路发生突发故障或设备缺陷检修和改造时,可能造成部分地区停电。
传统配电网引流线的搭接或更换作业主要依靠人工完成。由于配电网设备结构紧凑、安全距离裕度小,引流线解搭线头时易造成相间、相地短路。电力系统传统人工作业方式强度大、效率低,且易出现漏检,误检。因此,配电网作业机器人的研究成为国内外机器人领域的热点之一[3]。利用机器人代替人工进行配电网引流线的搭接或更换作业的研究日益重要。
针对人工进行配电网引流线的搭接或更换作业危险程度高,本文提出了一种基于STM32和TMS320的配电网作业机器人控制系统。该控制系统具有可靠性高,系统程序易开发等特点[4]。
1 系统总体设计
本机器人控制系统采用“主从式”的拓扑结构,该拓扑结构对比于“集中式”结构极大地减少了主控制器的负担。机器人的控制系统总体架构如图1所示。该系统控制部分由主控制板和机械臂控制板两部分组成,两板间通过串口进行数据交换。主控制板主要由微控制器、电压电流采集电路、供电电路组成,通过无线通讯模块与上位机进行通信。主控制板主要完成的功能为:与上位机进行数据交换;接收各传感器的数据进行分析处理并由处理结果执行相应的指令。机械臂控制板主要由机械臂微控制器、CAN总线通信电路、编码器信号采集电路组成。主要完成对机械臂的控制及编码器信息的采集。
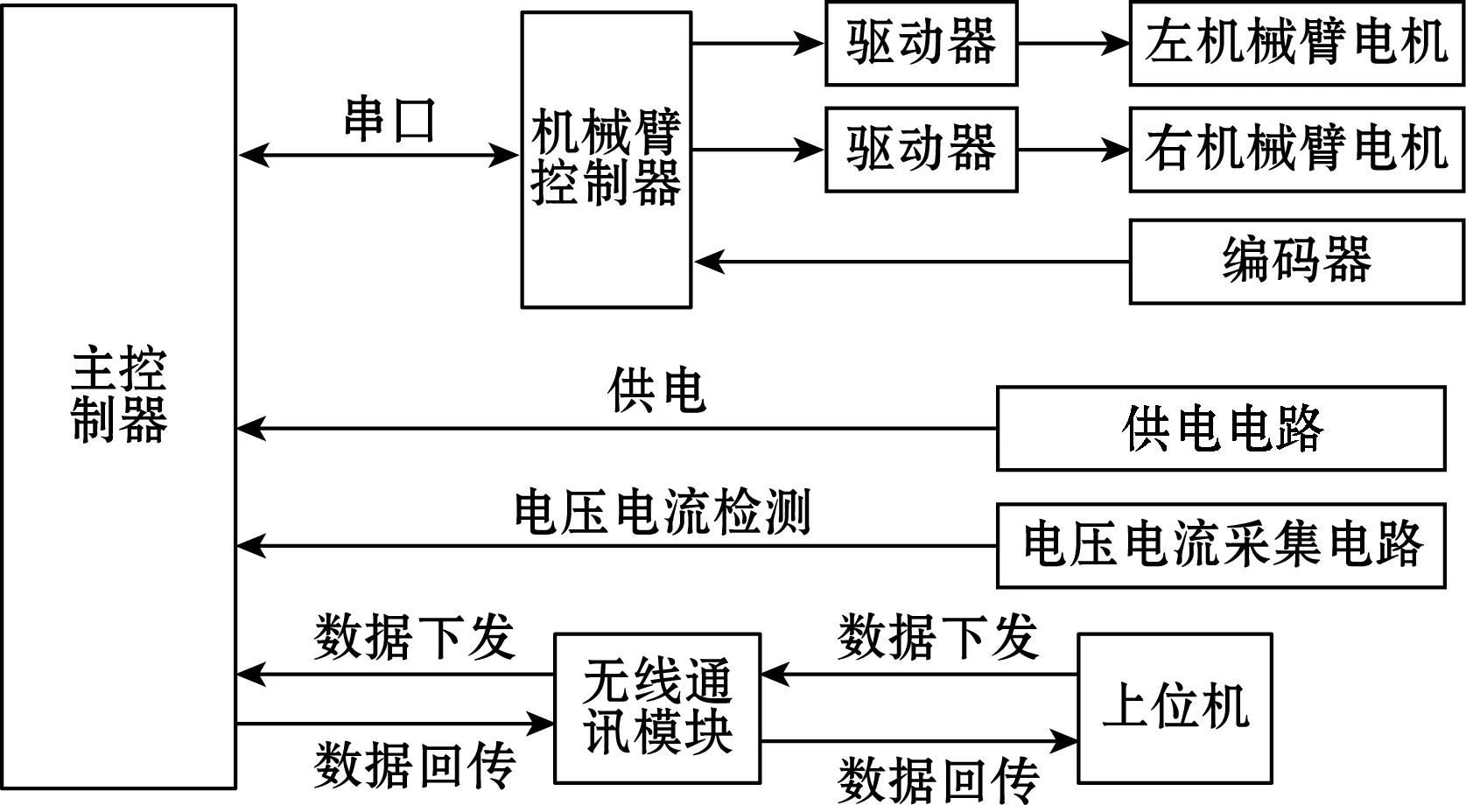
图1 配电网作业机器人控制系统总体框图
2 系统硬件设计
机器人系统硬件设计分为主控制板硬件电路设计、机械臂控制板硬件电路设计及电源系统电路设计。其中无线通讯模块采用TL-S2无线网桥。
2.1 主控制板硬件电路设计
2.1.1 主控制芯片
主控制器的控制芯片采用STM32F407IGT6单片机。该单片机是32位高性能、低成本、低功耗单片机[5];其系统频率可达168 MHz,具有丰富的外设接口。机器人控制使用的芯片端口有:1个网络通信接口(PA1、PA2、PA7、PC4、PC5、PB11、PB12、PB13),连接网络通信芯片LAN8720,主要用于与上位机进行数据交换;2个传感器端口,其中PA3端口用于采集锂电池的电压,PA5端口用于采集电气主干线电流;1个串行通信接口(PA9、PA10),用于与机械臂控制器进行数据交换。
2.1.2 电流采集电路
电流采集电路的电流传感器选用ACS712ELCTR-30A,相比于传统的电磁电流传感器,该传感器具有精度高、体积小、响应快等优点。ACS712ELCTR-30A的灵敏度为66 mV/A,电流测量范围为-30~+30 A。该传感器供电电压使用5 V,输出与输入的关系为:
Vout=0.5VCC+Im·n
(1)
式中:Vout为电流传感器输出的电压值;VCC为供电电压;Im为测量电流;n为灵敏度。
因微处理器的ADC的工作电压不超过3.3 V,在电流传感器输出端连接电阻分压,将输出电压降到3.3 V以下;分压电阻后串接电压跟随器进行电气隔离,所得输出电压输入微处理器的ADC转换端口。图2为电流采集电路原理图。
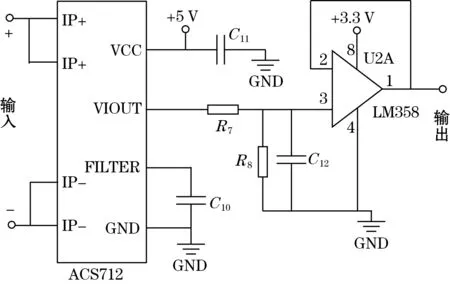
图2 电流采集电路
2.1.3 主控制板电源电路
主控制板及机械臂控制板上元器件供电电压包含3.3 V和5 V两种。两种控制板上元器件为小功率器件,本文采用独立设计DC-DC转换电路为两种控制板元器件供电,提高系统的可靠性。APW7080电源芯片输入为4.5 V到26 V宽电压范围,输出电压可调。两种控制板上,5 V电压采用APW7080稳压芯片,其输出电流可达2 A,3.3 V电压采用ASM1117稳压芯片。主控制板及机械臂控制板电源电路如图3所示。
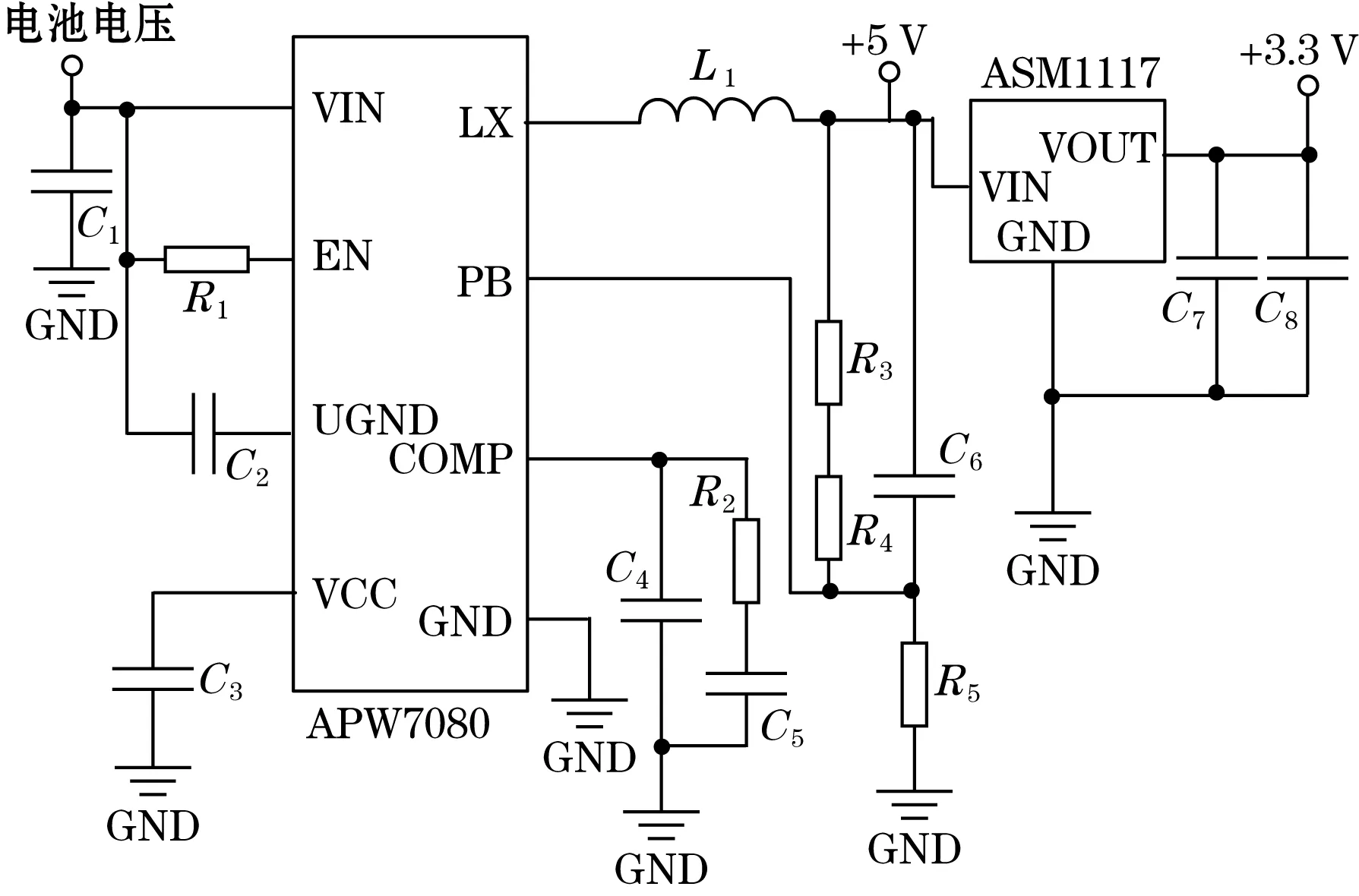
图3 两种控制板电源电路
2.2 机械臂控制板硬件电路设计
机械臂控制板的微控制器采用TMS320F28335芯片,该芯片的系统主频为150 MHz,具有16个ADC通道、2路CAN通信端口、18路PWM通道以及50个通用I /O口等配置;有良好的稳定性及抗干扰能力,能满足机械臂的相关控制要求。
2.2.1 CAN总线通信电路
CAN总线属于现场总线,在CAN网络中的各节点都采用仲裁的方式竞争向总线发送数据,同时CAN总线上不同的节点同时接收到相同的数据,这些特点使得CAN总线能较好地处理实时数据。同时CAN总线具有传输速度快,可同时控制多个设备,抗干扰能力强等特点。本设计的CAN收发器采用CTM8251T芯片。该芯片内部集成了CAN收发器件,符合ISO11898标准并且具有DC2500V的隔离功能[6]。CAN总线及电机控制电路设计如图4所示。机械臂控制器通过CAN总线与电机驱动器进行交换数据,由于CAN总线可同时挂接多个从机电机驱动器,可极大减少机械臂的布线数量。
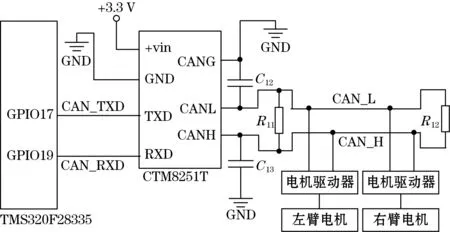
图4 CAN总线及电机控制电路框图
2.2.2 电机驱动器及电机
电机驱动器选用RMDS系列驱动器,该系列驱动器驱动电流大,支持CAN通信协议[7];具有速度模式、位置模式和转矩模式等工作模式,同时具有电机过载保护功能。机器臂底座关节电机负载重、所需工作电流大,选用maxon EC45电机并选配RMDS-402驱动器,其他关节电机选用maxon EC25电机并选配RMDS-201驱动器。机器臂电机驱动器均通过CAN总线与机械臂控制器相连,驱动器及电机连接方式如图4所示。机械臂控制器通过CAN总线向电机驱动器发送电机控制指令从而控制相应的电机。
2.2.3 编码器
编码器选用E6B2系列编码器,该编码器为两通道增量式光电编码器。光电编码器为数字式角度传感器,它可以把角位移量转换为相应的电脉冲并输出[8]。光电编码器具有响应快、精度高,能在恶劣的环境下使用且有较高的可靠性等特点。本文选用E6B2-CWZ6C编码器用于机械臂关节转角位置和旋转速度的检测。
2.3 电源系统电路设计
本文机器人由一块24V/20ah锂电池供电,正常输出12 A电流,最大可输出20 A电流。电源系统采用锂电池外接不同电压等级的电源转换模块方案。机器人中电机的耗能大,电机驱动器为24 V到48 V宽电压输入,直接将锂电池连接电机驱动器以减少损耗。W25及W12系列电源转换模块具有带隔离、体积小、过载及短路保护等优点。无线通讯模块等12 V电压由W25-24S12电源转换模块提供。编码器等5 V电压采用W12-24S5电源转换模块提供。电源供电系统框图如图5所示。

图5 电源供电系统框图
3 系统软件设计
配电网作业机器人系统软件包括控制板控制软件和上位机测控软件设计两部分。
3.1 控制板控制软件设计
3.1.1 主控制板控制软件
主控制板控制软件中嵌入了UCOS微实时操作系统,通过多线程的方式处理各个模块的任务,能保证机器人高效完成任务。主控制板控制软件包括主线程及各子线程。其中主线程用于机器人各外设模块的初始化及创建默认子线程;子线程负责执行各任务及与上位机通信。主线程的初始化包括系统时钟、串口及网口初始化、定时器初始化及创建默认子线程。默认子线程创建其他子线程,子线程包括系统控制子线程、传感器数据采集子线程及网络通信子线程。主控制板程序流程如图6所示。
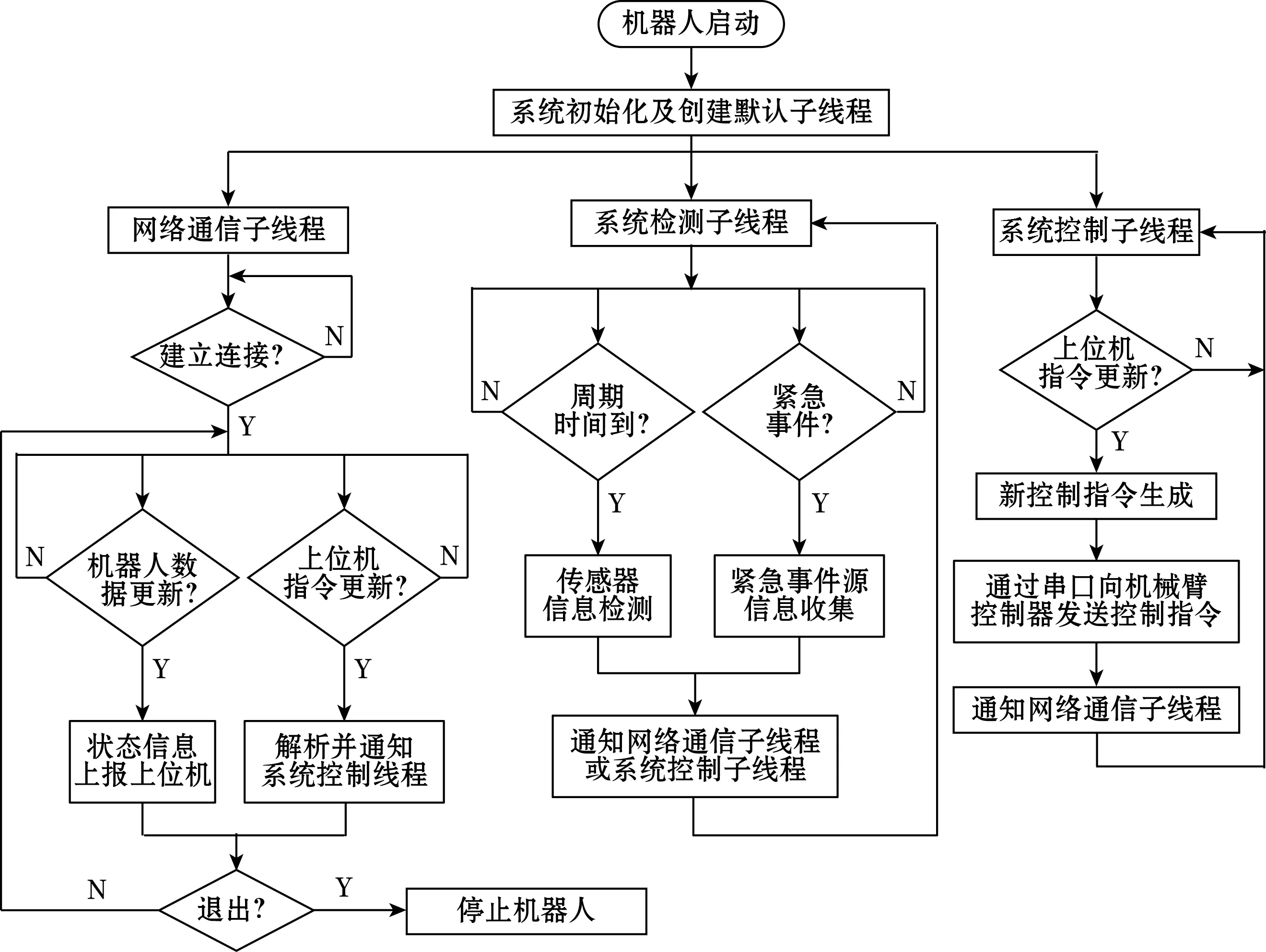
图6 主控制板程序流程图
3.1.2 机械臂控制板控制软件
机械臂控制板上电后首先对微控制器进行初始化,包括系统时钟、串口、CAN、ADC采样等。初始化完成后读取串口数据,当串口接收到新的控制指令时,立即向电机驱动器发送更新指令。接着读取机械臂对应关节电机编码器的数据,当机械臂关节到达目的位置时,立即向电机驱动器发送停止指令。机械臂控制板程序流程如图7所示。
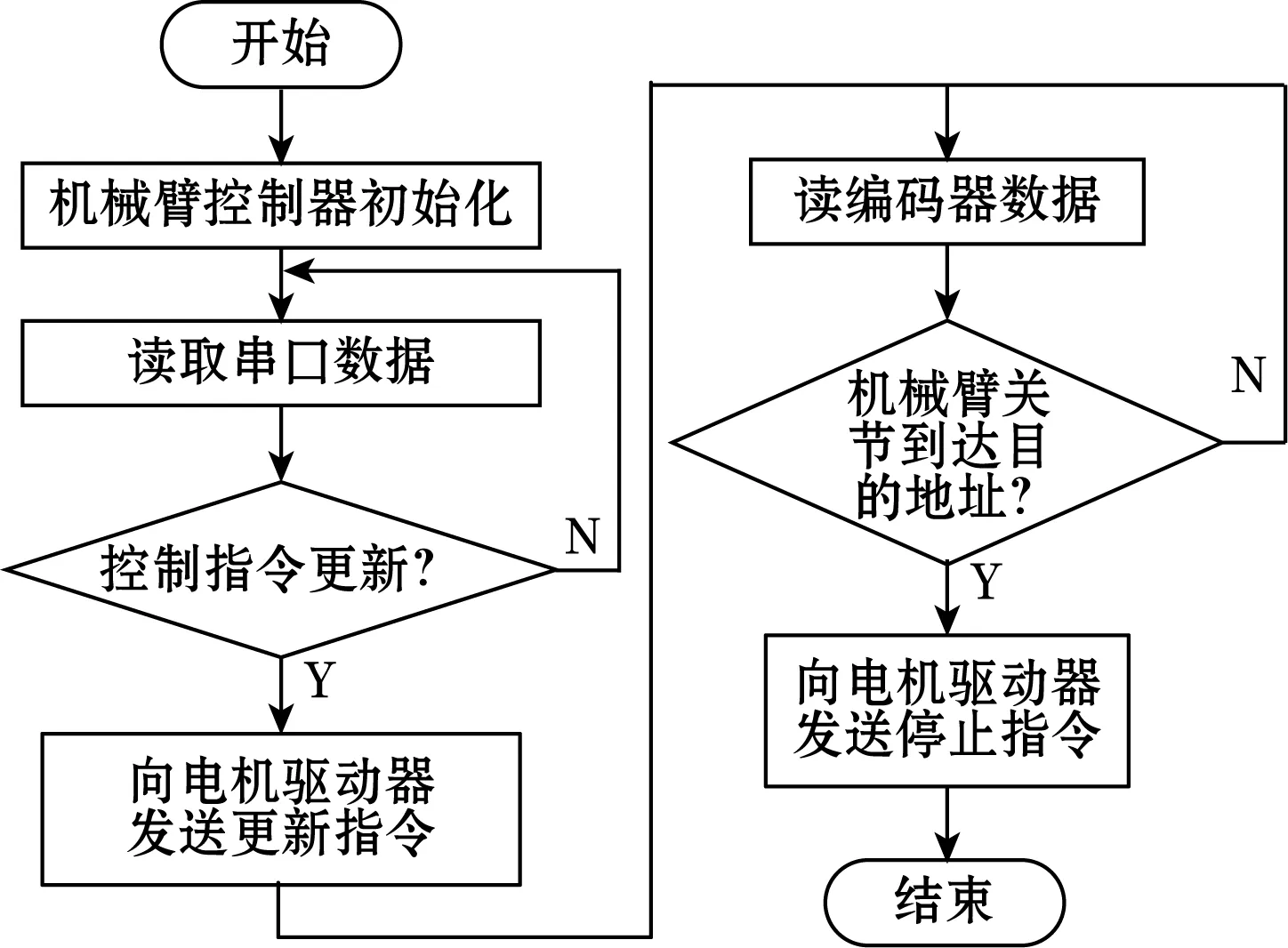
图7 机械臂控制板程序流程图
3.2 上位机测控软件
测控软件在Visual Studio 2015开发环境中使用C#语言编写,并根据机器人作业要求制定上位机软件界面。上位机软件界面如图8所示。上位机软件界面主要包括系统启停,机械臂关节控制及参数设置,实时显示电池电量、主干线电流、机械臂关节当前速度及角度等部分,可设置机械臂关节的运动速度大小及其关节角度的限值。
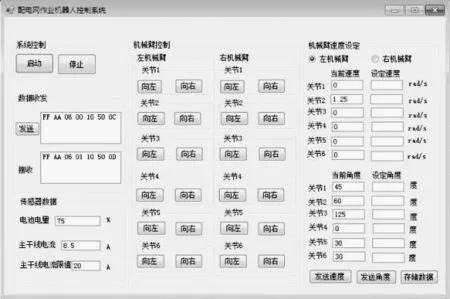
图8 上位机软件界面图
4 实验及分析
4.1 机器人的机械臂运动实验
为了更好地完成机器人的作业任务,需对机械臂关节电机的转速准确性进行测定。
在实验状态下,分别用机器人的编码器和测速仪对机械臂关节电机的转速进行测定。将编码器的速度采样值和测速仪的实测值进行分析比较,对比结果如表1所示。根据表1的数据可知,编码器采样值和测速仪实测值之间的误差在0.02 rad/s以内,机械臂关节电机速度控制有较高的控制精度,满足机器人进行配电网作业的要求。
4.2 机器人实际作业效果
在确定机器人运动实验满足误差要求后,将机器人进行实际作业,检验机器人的作业性能。多次实际作业实验表明,使用本控制系统的机器人可有效完成配电网引流线的搭接或更换工作。实际作业效果如图9所示。

图9 机器人实际作业效果
表1 机械臂关节电机速度对比表
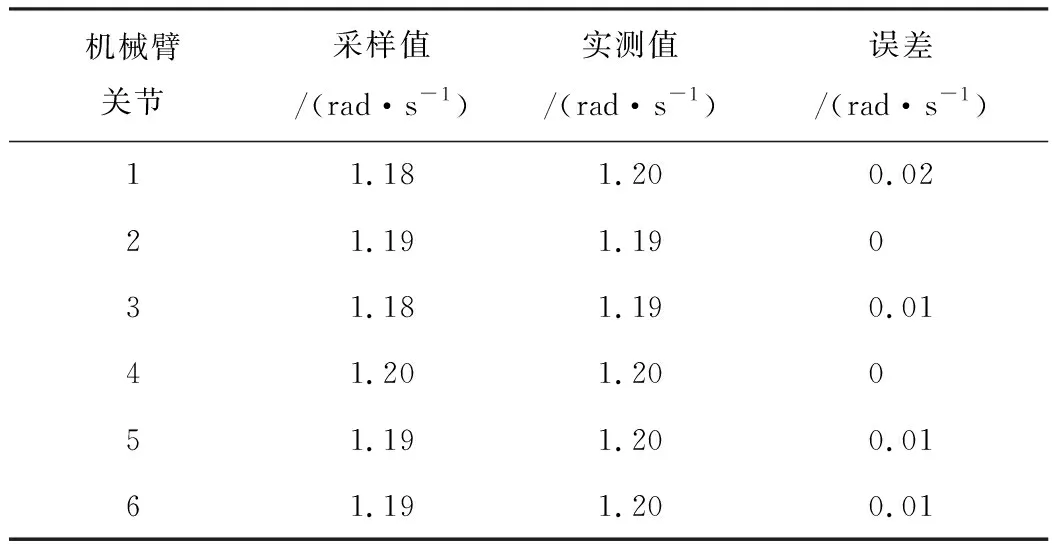
机械臂关节采样值/(rad·s-1)实测值/(rad·s-1)误差/(rad·s-1)11.181.200.0221.191.19031.181.190.0141.201.20051.191.200.0161.191.200.01
5 结束语
本文采用STM32和TMS320设计了一套配电网作业机器人控制系统,通过合理的软硬件设计,可实现使用机器人进行配电网引流线的搭接或更换作业。通过无线通信建立起上位机与机器人之间的连接,可实现远程操控机器人作业。对比于传统的人工配电网作业,极大地降低了作业强度及作业危险性。经测验,本文设计的机器人能快速有效地完成作业任务,为配电网检修领域机器人研究提供了较好的依据。
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
北华大学学报(自然科学版)(2021年3期)2021-07-13
电脑爱好者(2020年6期)2020-05-26
电子制作(2019年23期)2019-02-23
制造技术与机床(2017年7期)2018-01-19
北京航空航天大学学报(2017年5期)2017-11-23
教育教学论坛(2017年34期)2017-08-30
中国科技纵横(2017年13期)2017-08-09
西安工程大学学报(2016年6期)2017-01-15
火控雷达技术(2016年2期)2016-02-06
