一种紧凑型压电叠层直线电机驱动足的优化设计
2020-03-25 01:31:46,,,
机械与电子 2020年3期
,,,
(1.江苏大学机械工程学院,江苏 镇江 212000;2.盐城工学院机械工程学院,江苏 盐城 224051)
0 引言
压电陶瓷是一种将机械能转换为电能或将电能转换为机械能的功能材料[1-2]。压电叠层是把多片压电陶瓷采取机械串联、电学并联的方法制作而成,因而能够在较低的激励电压下输出微米级的精确位移。压电叠层具有响应快、输出力大、定位精度高和机电耦合系数大等特点,在驱动器、泵、阀、发电和人工耳蜗等方面得到广泛应用[3-7]。压电叠层抗压能力较强,但较小的剪力和拉力都可能导致叠层破坏。在使用压电叠层时,一方面需要对压电叠层施加预紧力,另一方面压电叠层工作时也会产生较大的输出力,压电叠层与驱动足间的作用力较大,较小的剪切力分量都会变得很大,进而破坏叠层。
使用各种防剪切机构可以有效保护叠层[8],目前常用的防剪切机构有柔性铰链[9]、球铰链[10]、半球垫块和半圆柱垫块[11]等。柔性铰链防剪切机构具有无机械摩擦、无间隙的特点,但其轴向刚度较小,预紧及压电叠层工作时会压缩柔铰,对电机的运行造成干扰;球铰链、半球垫块和半圆柱垫块都可以很好地消除剪切力,并且有防扭的作用,但是球铰链元件较多,增加了装配难度,而半球垫块和半圆柱垫块的加工方装配都较为方便,是有效方便的防剪力方案。
压电直线电机作为一种精密驱动设备,使用以上防剪切机构会不可避免地增加结构尺寸,提高装配难度,装配精度也难以保证。不使用防剪切机构可以减小电机结构尺寸,电机一体化设计也有利于制作和保证精度,但必须对电机结构尺寸进行仿真设计,减少压电叠层所受破坏力。为此,对一种紧凑型直线压电电机驱动足关键结构尺寸进行优化设计,提出在无防剪切机构时电机驱动足的结构优化方法。提出一种可减小压电叠层剪切力的并联S形弹簧预紧机构,并对机构参数进行仿真设计。
1 紧凑型压电电机驱动足结构
图1为电机驱动足结构,图中虚线方块为压电叠层。横向压电层伸长推动横向振动块左右运动,横向压电叠层的右端为输出端;纵向压电叠层伸长推动纵向振动框做上下运动,电机的横向运动和纵向运动具有解耦特性。电机不需要通过结构来放大压电叠层的位移输出,因此,电机的设计目标趋向于减小压电叠层所受剪切力,减小机构的最大等效应力,以及具有合适的机构刚度。
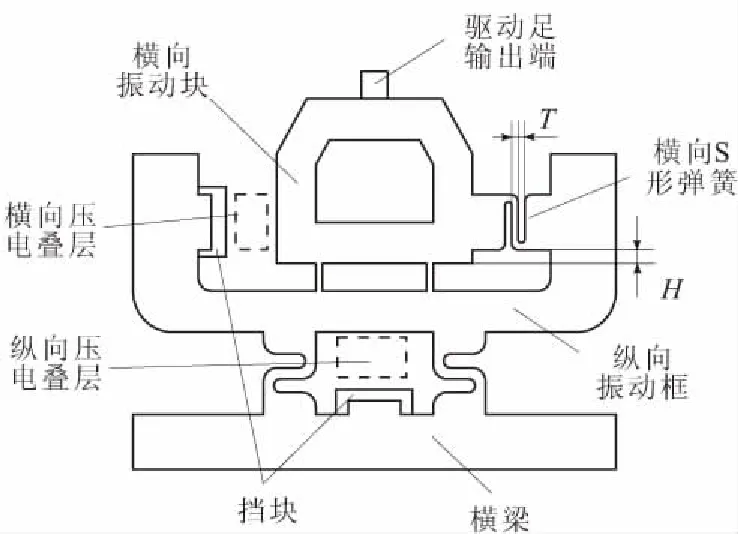
图1 驱动足结构
2 驱动足横向运动优化
在图1中所示横向压电叠层安装位置,对驱动足施加2个大小相同方向相反的力F,驱动足4个角施加固定约束,得到驱动足横向运动总体变形云图,如图2所示。横向压电叠层伸长时横向振动块发生旋转和纵向平移变形,这2种变形都会使压电叠层受到剪切力,因此要减小这2个变形。

图2 驱动足横向运动总体变形云图
驱动足横向运动变形及细节如图3所示。其中,A为横向振动块上压电叠层安装面下边缘,B为压电叠层安装面上边缘,A和B的距离为压电叠层宽度t,A和B组成的面即为压电叠层输出面。用A和B在X方向上移动的差值Δx衡量旋转变形;因为横向压电叠层伸长时纵向振动框几乎不发生变形,所以用A在Y方向的移动Δy衡量纵向平移变形。

图3 驱动足横向运动变形及细节
2.1 横向S形弹簧高度优化
横向S形弹簧为匀厚度弹簧,厚度和间隙相等,拐角处进行倒圆角。机构具有结构小巧、刚度可变性大的特点。如图1所示,横向S形弹簧的高度H和厚度T为关键结构参数,影响横向振动块的横向运动,需要对H和T进行仿真设计。
驱动足所使用材料为45号钢,其杨氏模量为209 GPa,泊松比为0.269,力F大小为150 N。当H等于1 mm,T等于0.5 mm时,Δx和Δy大小分别为1.333 μm和1.911 μm,最大等效应力为253.35 MPa。当厚度T为0.5 mm时,改变H对驱动足进行仿真。高度H对Δx和Δy的关系曲线如图4所示。随着H的增大,Δx和Δy都减小,有效地降低了压电叠层工作时所受剪切力。在高度为4 mm时,Δx和Δy的值为0.871 μm和1.535 μm。高度H对驱动足横向刚度和最大等效应力关系曲线如图5所示。由图5可知,随着H的增大,机构的刚度略有增加,而驱动足的最大等效应力变化不大,等效应力在253.00 MPa左右。

图4 高度H与Δx和Δy关系曲线
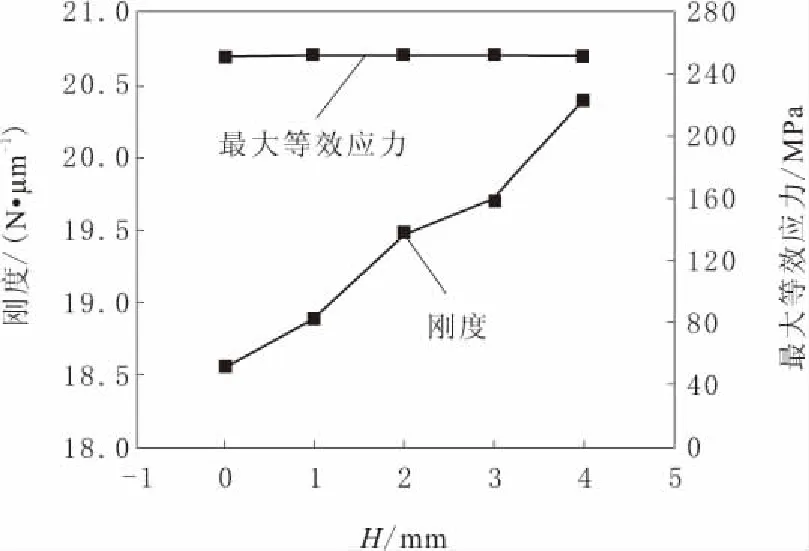
图5 高度H与刚度和最大等效应力关系曲线
2.2 横向S形弹簧厚度优化
横向S形弹簧高度H最高为4 mm,在此高度下改变弹簧的厚度T,并对驱动足进行仿真,得到T与Δx和Δy的关系曲线,如图6所示。随着横向S形弹簧厚度T的增加,Δx和Δy都减小,减小了压电叠层所受剪切力。在厚度为0.8 mm时,Δx和Δy的值为0.194 μm和0.894 μm,进一步减小了压电叠层所受剪切力。厚度T与刚度和最大等效应力关系曲线如图7所示。随着厚度T的增加,机构的刚度逐渐增加,最大等效应力从276.69 MPa逐渐减小至196.36 MPa。

图6 厚度T与Δx和Δy关系曲线

图7 厚度T与刚度和最大等效应力关系曲线
在横向S形弹簧的高度H为4 mm,厚度T为0.8 mm时,横向振动块左表面X方向变形云图如图8所示。图8中,振动块左表面变形为对称分布,即此表面在压电叠层的作用力下已经产生了X方向的平行移动,再增大厚度T会导致表面产生相反的旋转变形,这对电机的位移输出是不利的。分析可知,产生的Δx是因为横向振动块刚度不足导致的,加厚横向振动块,再次仿真得到Δx为0.061 μm和Δy为0.749 μm,最大等效应力为189.68 MPa。至此,通过改变结构位置和尺寸,把Δx由1.333 μm减小至0.061 μm,减少了95.42%;Δy由1.911 μm减小至0.749 μm,减少了60.81%; 最大等效应力由253.35 MPa减小至189.68 MPa,减少了25.13%。
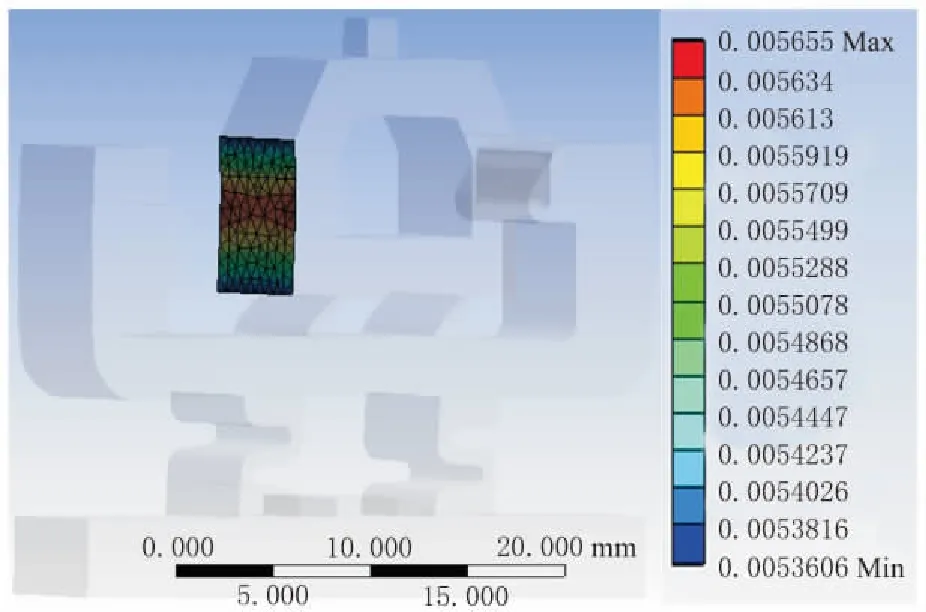
图8 驱动足X方向变形云图
以上主要对压电叠层所受剪切力和机构的最大等效应力进行了优化,在设计中,还要考虑刚度、驱动端输出位移等因素。例如,在具有压电叠层位移放大功能的机构中,主要优化目标又转变为增加放大系数[12-13]。综上所述,在无防剪切机构的压电叠层安装机构设计中,要对机构的结构和参数进行灵活设计,综合考虑叠层所受剪切力、机构的刚度、工作时的最大等效应力,以及输出端位移等因素。
3 并联S形预紧弹簧机构设计
在无防剪切安装机构的设计中,非对称结构可能会引起压电叠层的剪切力,而使用对称预紧机构则可以有效减少叠层所受剪切力。目前,常用的对称预紧机构有双侧悬臂梁柔性机构[14]、菱形机构[15]和沙漏型机构[16]等对称机构。双侧悬臂梁柔性机构推动机构中部的小质量块上下移动,放大比为1;菱形机构和沙漏型机构具有位移放大功能,但会相应减小叠层的输出力。为了推动机构上部整体移动,实现电机的解耦特性,设计了一种并联S形弹簧预紧机构,机构如图9所示。图9中,S形弹簧为匀厚度弹簧,厚度和间隔都为R;S形弹簧的宽为W;机构的厚度为N。
使用仿真分析软件对R,W,N参数进行仿真设
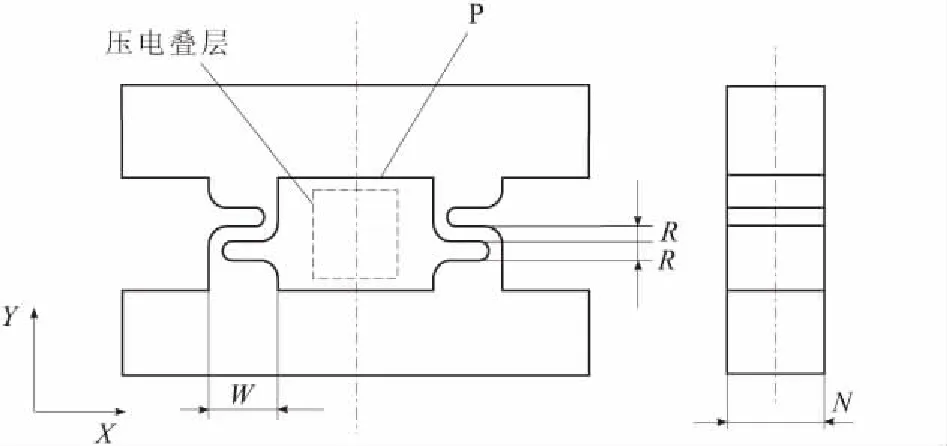
图9 并联S形弹簧机构
计。材料属性为上文中的45号钢,边界条件为下端固定,在压电叠层安装面P处施加向上150 N的力。仿真结果显示,并联S形预紧弹簧机构的旋转变形和横向位移变形为零,即压电叠层在此机构中基本不受到剪切力。
当N为5.4 mm时,R和W参数对刚度的影响如图10所示,随着R的增加,刚度近似指数增加,W越小刚度越大。当N为5.4 mm时,R和W参数对最大等效应力的关系如图11所示,随着R的减小,最大等效应力呈近似指数增加,W越大最大等效应力越大。W=3时可以获得较大的刚度,适合大刚度设计;W=5时刚度普遍较小,适合小刚度设计;W=4时刚度适中。总的来看,当刚度相等时,W=3比W=4和W=5时最大等效应力更大,同样W=4比W=5时的最大等效应力更大,即过小的W会导致应力更加集中。这表明在刚度满足使用时,W的值应尽量取得大些。

图10 R和W与刚度关系曲线

图11 R和W与等效应力关系曲线
W等于4,R等于0.9时,N与刚度和最大等效应力的关系曲线如图12所示。随着机构厚度N的增加,机构刚度线性增加,最大等效应力线性减小。即增加机构厚度可以增加刚度,减小最大等效应力。

图12 N与刚度和最大等效应力的关系曲线
4 结束语
通过分析可知,压电叠层工作时受到剪切力是由于驱动足发生旋转和平移变形引起的。通过对一种紧凑型压电电机驱动足的横向运动进行仿真优化,把横向振动块的旋转变形由1.333 μm减小至0.061 μm,减少了95.42%;纵向平移变形由1.911 μm减小至0.749 μm,减少了60.81%;驱动足最大等效应力由253.35 MPa减小至189.68 MPa,减少了25.13%,有效优化了压电叠层的工作环境。
通过对并联S形弹簧机构的仿真,表明该机构可以提供几至几百N/μm的大刚度范围,能充分发挥压电叠层的输出性能,且压电叠层基本不受到剪切力。在刚度满足的情况下应选择较大的弹簧宽度,以减小机构的最大等效应力。
猜你喜欢
橡塑技术与装备(2022年10期)2022-10-03 07:39:14
水利科技与经济(2021年11期)2021-12-04 09:11:32
装备制造技术(2020年2期)2020-12-14 03:09:24
建材发展导向(2019年13期)2019-08-24 06:37:46
压电与声光(2019年1期)2019-02-22 09:46:06
铜仁学院学报(2018年6期)2018-07-05 09:47:40
浙江大学学报(工学版)(2016年2期)2016-06-05 09:20:51
振动、测试与诊断(2014年6期)2014-03-01 01:14:55
振动、测试与诊断(2014年6期)2014-03-01 01:14:49
自动化博览(2014年6期)2014-02-28 22:31:59