
基于UWB 的分布式室内停车动态监测系统设计
2020-03-24 03:49潘敬宇龚元明
智能计算机与应用 2020年11期
潘敬宇,龚元明
(上海工程技术大学 机械与汽车工程学院,上海 201620)
0 引言
解决城市“停车难”的问题主要通过两个途径,其一是大量增加停车场的数量,其二是引入一套智能停车场管理系统,提高传统停车场车位的利用率[1]。由于短期内在城市里大量增加停车场不太现实,所以如何提升停车管理水平成为解决城市“停车难”问题的关键[2]。李鲁昭研究了UWB 定位技术的具体实现方案,通过仿真比较和系统测试证明了UWB 方案的有效性和可行性[3]。然而UWB定位的发射功率低,所以定位距离不能太远,一般是小于100 m。对于机场、火车站等大型室内停车场而言,单个UWB 定位系统很难完成如此大面积的覆盖。而且当距离过大、障碍物过多,UWB 信号衰减会导致定位精度下降[4]。另外,多基站和多标签定位系统的中心节点工作站计算量大,难以适应大型室内停车场高峰时段的实时定位要求。本文采用分布式定位计算方案,实现多基站多标签定位系统的在线协同,拓展UWB 定位系统的适用场地条件和范围。当室内停车场大规模引入智能停车管理系统时,覆盖不全面、定位精度不高、运算缓慢的问题逐渐凸显。因此,本文引入分布式计算的UWB 定位技术,对目标停车场进行分区,设计了一种分布定位、集中处理的室内停车动态监测系统。
1 总体设计方案
1.1 系统组成
系统现场硬件设备包括UWB 定位模块、树莓派、交换机、上位机等,监测系统包括上位机监测界面、SQL 数据库。UWB 定位模块根据功能可分为3种:定位基站、定位标签和中继基站。本设计选用的UWB 定位模块的测距范围可达300 m,定位精度小于10 cm。但考虑到室内停车场场地条件复杂、障碍物多,故按照100 m 的间隔对车库进行划分,在每个分区布置定位模块和子网络节点。系统组成架构如图1 所示。
在室内停车场A 区布置有中继基站A0、定位基站A1 和A2,以及A 区内停放车辆上的定位标签Tx,共同组成A 区车库定位系统。基站A0、A1、A2分别发送脉冲信号,标签Tx 接收到后返回,基站A0、A1、A2 将两次脉冲信号的时间差转换成距离,然后基站A1、A2 将距离数据转发至基站A0 汇总,由基站A0 通过USB 串口与树莓派连接。同理,其它分区同样需要布置中继基站和定位基站,由各个分区的树莓派组成分布式计算网络,在同一个局域网下,位于监控室的上位机可以动态监测整个室内停车场的车辆信息。
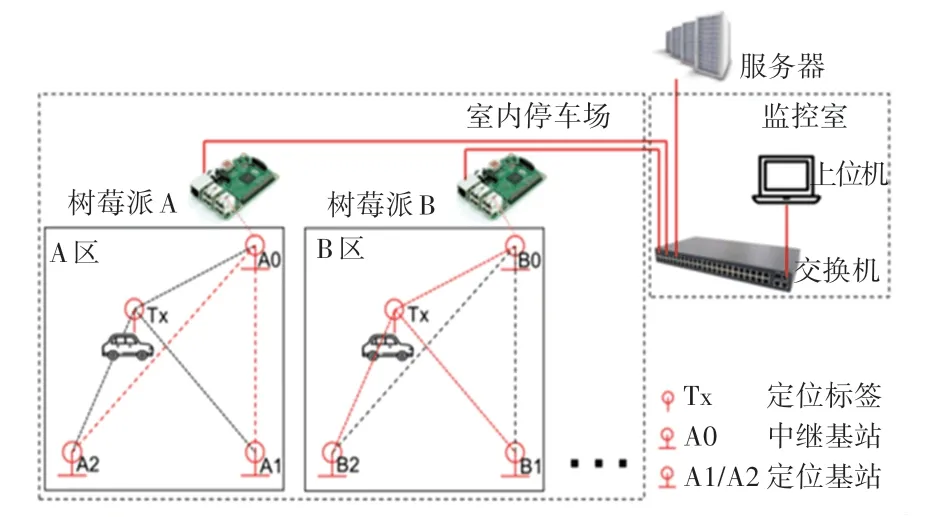
图1 系统组成示意图Fig.1 Schematic diagram of system composition
1.2 系统工作原理
如图2 所示,监测系统的运行包括测距信息采集、数据上传解析、监测界面显示和云端同步。其中,测距信息采集由UWB 定位模块完成,数据的解析与上传由树莓派负责,树莓派上运行有Linux 系统Raspbian 版本,内置Python 编程环境,可基于三边定位法和改进的卡尔曼滤波法,对各个基站测距的数据流进行解析计算[5-7],得到A 区车库内各个车辆静态定位和平顺之后的车辆动态行驶轨迹。当室内停车场规模较大、停放车辆数量较多时,分布在个各个定位分区的树莓派,通过工业以太网将计算得到的定位数据和动态轨迹汇总至上位机监测界面,将本地车库内的车辆实时定位信息存储在本地数据库内,同时将车辆停放信息上传至远程服务器。
2 UWB 定位方案设计
定位系统基于TOF(Time-of-Flight,时间飞行原理),每个定位分区布置3 个定位基站和若干个标签。其中一个定位基站与树莓派相连,利用树莓派的运算资源对测距数据先进行解析和优化,再通过局域网络将各定位分区的车辆定位信息上传至监控室进行统一监测。UWB 模块硬件连接如图3 所示。
2.1 定位原理
系统上位机软件的功能包括对测距信息的定位算法解析、数据存储及上传、监测界面显示。
UWB 定位通常采用三边测量法,其原理如图4所示。以三个节点A、B、C为圆心作圆,坐标分别为(Xa,Ya)、(Xb,Yb)、(Xc,Yc),这3 个圆相交于点D。交点D即为移动节点,A、B、C即为参考节点,A、B、C与交点D的距离分别为da、db、dc。如图4 所示。

图2 系统运行示意图Fig.2 Schematic diagram of system operation
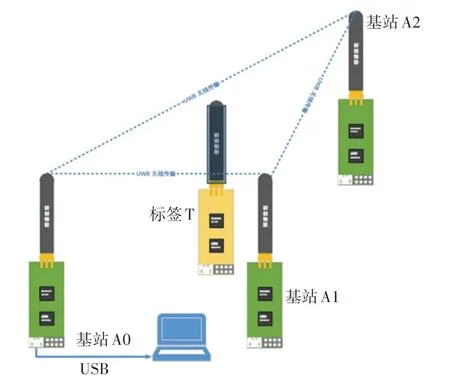
图3 UWB 模块硬件连接图Fig.3 UWB module hardware connection diagram

图4 三边定位法原理图Fig.4 Principle diagram of trilateral positioning method
由图4 中三个圆交于一点的几何关系可以得到式(1):

采用最小二乘法对式(1)求解,可得D点坐标公式(2):
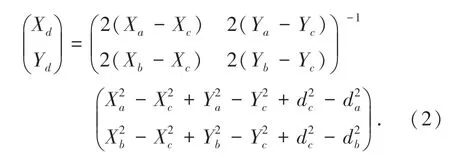
式(2)是对单个定位分区的定位坐标计算[8],对于大型室内停车场来说,不同分区的定位坐标还需进行坐标变换才能上传。以A 区为例,具体方法如下:
(1)建立室内停车场平面直角坐标系,标定地图位置的坐标;
(2)选择A 区坐标参考点OA,并确定该点在室内停车场的绝对坐标(xA,yA);
(3)根据现场实况,对分区坐标进行平移变换或旋转变换。
2.2 子网络设计
在工控领域,主要有工业以太网技术和工业现场总线技术二类。其中,工业以太网在技术上与商业以太网兼容,均使用TCP/IP 协议和RJ45 硬件网络接口,且以太网的速率要比传统现场总线快很多,完全可以满足工业控制网络不断增长的带宽要求,故本设计采用工业以太网技术,来实现分布式定位计算的传输。子网络系统结构如图5 所示。
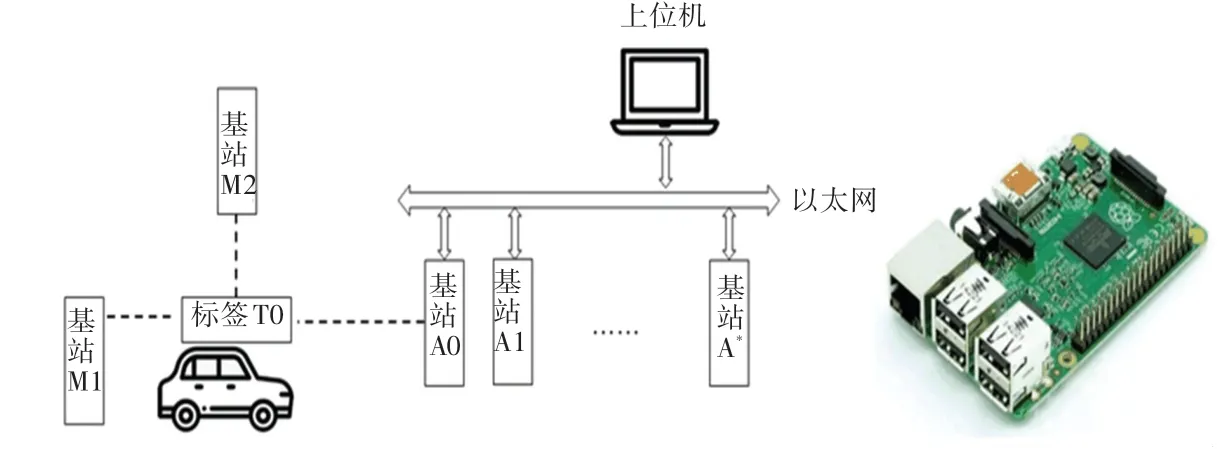
图5 子网络系统图Fig.5 Sub-network system diagram
停车场各个分区的中继基站,可通过树莓派接入室内停车动态监测网络中。由于这里采用工业以太网,故选择KUNBUS 公司的Revpi Conenct。其硬件基于树莓派,内部集成支持24 小时缓存的实时时钟(RTC),以确保RevPi Connect 即使在断电的情况下仍然保存运行时间点;软件采用Linux 开源架构,预装Raspbian 操作系统版本,可以运行Python 或C语言编写的脚本文件。
同一室内停车场的各定位分区都要布置无线或有线网口,确保分布式定位计算的树莓派都处于同一网络中,同时为便于管理局域网内各节点的路由连接,各分区树莓派应具有固定静态IP 地址。对树莓派的访问和维护可通过SSH(Secure Shell,安全外壳协议)远程登录进行,端口号:22,默认用户名和密码为pi@raspberry。
2.3 动态全局地图
为实现室内停车场的路径规划及导航功能,监测系统需动态监测停放车辆行驶轨迹。车辆进入停车场后,定位标签与车牌绑定,将每个车辆的动态位置与静态地图结合,形成动态全局地图。
监测系统会轮询每个在线标签的位置坐标,如图6 所示。记录车辆X从进入到离开停车场期间的实时位置,将所有车辆的位置更新汇总,即可实现动态全局地图。当两辆以上的汽车同时驶入或驶出停车场道路时,系统将行驶的车辆视为可移动障碍物,适时调整室内导航,避免路面拥堵甚至碰撞[9]。通过路径规划的优化,尽可能提升停车场的利用率和运行流畅程度。

图6 车辆X 的动态地图更新流程图Fig.6 Flow chart of dynamic map update for vehicle X
3 数据交互与通信
由于室内停车场所处位置GPS 信号条件差且较为空旷,故需在停车场全范围内覆盖蜂窝网络信号。随着第五代移动通信技术的迅速发展,高速率、低延迟、多连接的优势让5G 成为智能驾驶领域的首选通信方式。
3.1 数据库设计
为实现数据的高效管理和云端存储,监测系统需要建立SQL 数据库,用于存储车位状态、定位标签对应停放车辆、车辆定位及其轨迹、停放时长等数据。基于SQL 语句,操作者可根据具体的使用情况实现多表之间及跨数据库的查询,除了增改和查询本地车位,还可登录远程服务器进行云端共享,供城市范围内其它停车场查询搜索。
客户端/服务器结构(Client/Server,C /S 结构)和网页/服务器结构(Browser/Server,B /S 结构)作为主流结构,通常用于网络数据库系统平台开发结构。C /S 结构具有合理划分应用逻辑,充分发挥客户机和服务器的性能的特点。同时可以在客户端和服务器端分别执行应用程序,且开发和布置难度低于B /S 结构[10],故本设计中的数据库采用基于C /S 模式的体系结构编写。
3.2 室内车路协同
V2X 表示Vehicle to X,即车辆同其它事物之间的相互通信。X 代表了所有的交通参与单元,即车辆(Vehicle)、交通基础设施(Infrastructure)、行人(Pedestrian)、云端(Cloud)等。V2X 技术为协同式自动驾驶提供可靠的信息交互平台,使智能车辆获取更全面的实时交通信息,可广泛应用于信号灯状态感知、弯道车速预测、远程交通信息获取等[11]。V2X 与摄像头或者雷达不同,是一种精确感知手段,依靠802.11p 或者5G 通信,可以在大范围内(室内300 m,室外1 000 m)准确感知周围车辆的态势。包括其位置、车速、转向灯状态等,解决单车智能形成的信息孤岛问题。
一方面,5G 基站的布置需实现整个室内停车场的通信范围全覆盖;另一方面,划分为多个定位分区的UWB 定位系统通过树莓派完成分布计算、集中上传云端的任务。如此,车辆通过5G 信号即可接收来自云端的路径规划及室内导航、对车辆的动态监测,为车辆在停车场内路面行驶提供实时反馈和针对性建议。
4 系统功能设计
4.1 入库登记
如图7 所示,监测系统正常工作时,上位机界面记录有各个定位分区的车位内是否有车辆停放,为进入该室内停车场的车辆提供参考。在入库登记时,车辆将激活UWB 定位标签,监控室为车辆提供可停放车位信息[12],数据库内增加车辆牌照索引。通过绑定标签ID 即可回传车辆实时定位坐标及位置,切换室内导航。
4.2 室内导航
如图8 所示,系统根据车辆当前位置和目的车位,结合道路及其路面通过车辆状况,提供路径规划和导航,尽可能避免道路拥堵和盲目寻找车位,有效提升室内停车的效率及利用率。

图7 入库登记示意图Fig.7 Schematic diagram of warehousing registration

图8 室内导航路线图Fig.8 Indoor navigation route map
4.3 出库更新
如图9 所示,停放车辆出库也需要室内导航。从离开车位开始,该车位即被释放。出库后,UWB定位标签休眠或由停车场回收,标签ID 与车辆牌照的绑定也随之失效,室外导航开启。
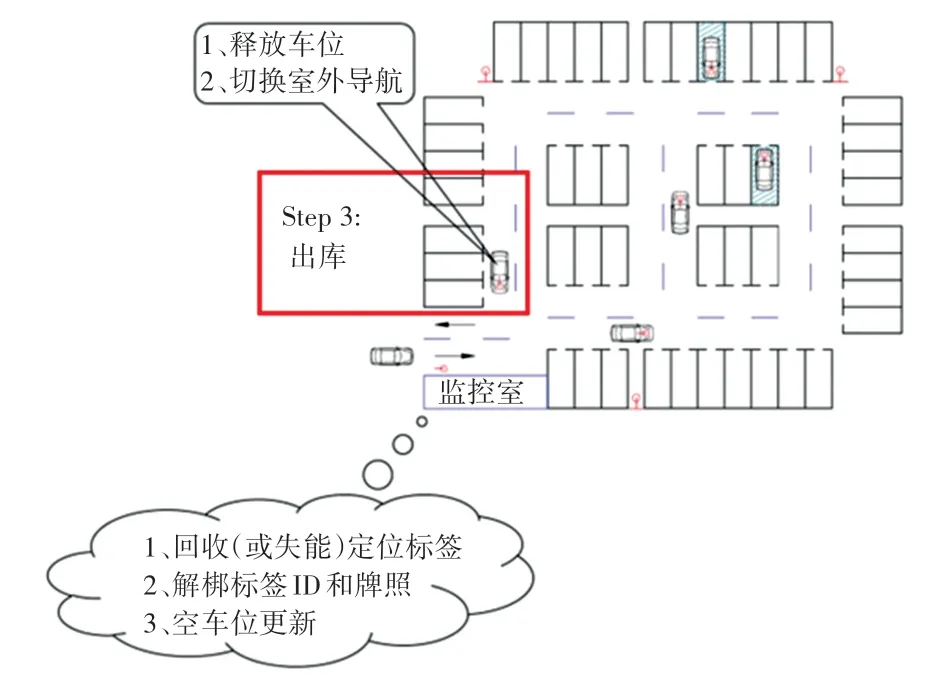
图9 出库更新示意图Fig.9 Schematic diagram of outbound update
4.4 跨车库调度
城市范围内,各个停车场的空闲车位分布不均也是造成“停车难”的因素之一。因此,为解决这一难题可将各个停车场的空闲车位信息上传至远程服务器,实现区域内车位信息共享。车辆在到达目的地之前即可获取周边停车场车位信息,搜索选择最佳停车位置。
5 结束语
本文设计了一种基于UWB 的室内停车动态监测系统,提出在大型室内停车场分区布置定位基站,通过树莓派建立分布式计算网络,实时采集停放车辆的动态定位信息,可实现空闲车位查询、室内停车导航、停放时长记录、行车轨迹监测,甚至在城市范围内实现跨区域车位信息共享和停车调度,推动智慧城市交通的发展与应用。
猜你喜欢
大众科学(2022年5期)2022-05-18
环球时报(2022-03-29)2022-03-29
汽车画刊(2020年5期)2020-10-20
祝您健康·文摘版(2020年3期)2020-04-09
现代家长(2018年11期)2018-01-05
农产品市场周刊(2016年43期)2016-12-23
农产品市场周刊(2016年43期)2016-12-23
中国新通信(2016年11期)2016-08-09
电脑爱好者(2016年6期)2016-04-01
中学生博览(2015年18期)2015-11-06
