
基于Arduino的智能黑板擦设计
2020-03-23 06:08王庆兴方世迟孔飞傲
无线互联科技 2020年1期
王庆兴 方世迟 孔飞傲
摘 要:为解决粉笔粉尘危害教师与前排学生健康的问题,文章设计了智能黑板擦。该装置采用两个减速电机作为动力,配置一个舵机与直流电机控制黑板擦工作;减速电机装在黑板的左下角,用来控制黑板擦在黑板面上的移动;舵机装在黑板擦的擦板,工作时可以使擦板与黑板面贴合;直流电机控制风扇以达到吸尘的目的。具体而言,使用Arduino为主控软件,操作移位控制按键,控制擦板移动到指定位置,再通过操作擦板启动按钮,擦板慢慢紧贴黑板并移动,擦除粉笔灰尘并将灰尘收集。
关键词:Arduino;按键控制;二维度;直流减速电机;直流电机;舵机
在日常的教学活动中,教师需要在黑板上书写,一节课通常为45 min,一般会写很多板书,正常情况下可能需要反复擦写数次,粉笔灰尘到处飘散,教师和在前排的学生难免会吸入大量的粉笔灰,随着时间的推移,会造成对身体的危害。所以本团队进行智能黑板擦的课题研究。
1 系统设计方案
本课题设计的黑板擦主要是通过控制电机旋转来控制黑板擦的运动,再利用静电吸附原理,吸附粉笔灰并将其储存入收纳盒中。智能黑板擦不需要人工去擦除粉笔灰,因为静电吸附的缘故,也不会出现粉笔灰弥漫的情况[1]。
1.1 软件设计
该智能黑板擦以Arduino为核心板控制系统,控制减速电机的旋转,同时黑板的边缘都装有微动开关(限位),当黑板擦运动至黑板边缘时,会自动矫正路线。当需要使用黑板擦的时候,通过控制开关实现黑板擦的移动与擦除,给使用者带来很多便携。
1.1.1 整体架构的设计
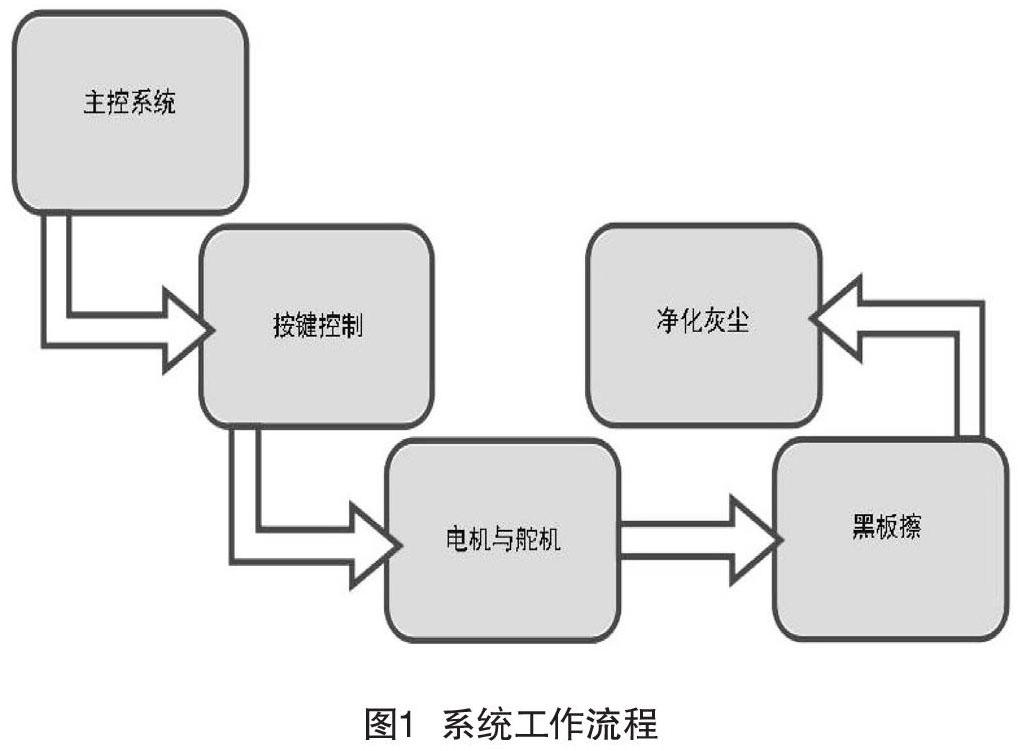
利用二维机械的整体架构,将整个黑板作为一个二维度坐标轴,利用x,y坐标点的位置变化来控制黑板擦的位置,皮带传动使得运动范围较广。用两个电动机作动力,控制电机驱动黑板擦的上下运动和导轨的左右运动。控制方式采用Arduino进行控制,类似于数控机床的编程控制方式,可以擦除特定区域的字迹。在到达工作指定点之前抬起黑板擦,工作时放下黑板擦,将黑板擦与黑板压紧,提高整体工作效率[2]。系统工作流程如图1所示。
1.1.2 Arduino控制平台简介
Arduino平台包括两个主要部分:硬件与软件。硬件部分可用于连接Arduino的电路板;软件部分是软件程序、计算机程序及其开发环境。Arduino通过各种传感器来感测环境,通过控制照明、马达与反馈装置对环境产生影响。微型计算机芯板可用Arduino的编程语言程序写入,二进制代码编译,存储在微型计算机中。Arduino是使用Arduino编程语言来实现在Arduino开发环境中的编程[3]。
1.1.3 定点原理
利用Arduino连接无线通信模块发送指令,黑板擦接受端接收对应的指令,执行动作。利用黑板上宫格的分区,分出9×9的格子,按动按键,控制电机的转动,到达需要擦除的区域时定点擦除。
1.1.4 功能原理
利用电动机可实现正反转的原理,通过减速器、齿轮和链条实现黑板擦自动上下运动。利用舵机的转动,使擦除装置与黑板可以自动接触与脱离,从而实现随时、随意擦除黑板的功能。利用吸尘器原理,实现了粉尘的集中清理功能。通过电路、开关和操作面板,实现所有运动的自动化控制。
1.2 吸尘净化系统(硬件)
1.2.1 灰尘吸入
通过电机的高速旋转,在主机内形成真空,利用由此产生的高速气流,从吸入口吸进粉笔灰尘,将粉笔灰尘放入尘袋,对粉笔灰尘进行第一次收集,使得粉笔灰尘不会随处飘落[4]。
1.2.2 粗效预过滤系统
粗效预过滤系统完成对粉笔灰尘的第一层净化。系统通过直流电机的高速转动带动风扇,在粉笔灰尘被吸入黑板擦后面的粉尘带,收集来的灰尘通过粗效预过滤系统完成大颗粒的滤除,将初步的大颗粒粉尘过滤在粉尘带中,完成粉笔灰尘的预处理。
1.2.3 前过滤片
经过粗效过滤器的空气进入前过滤片。前过滤片采用纸板过滤网,其滤芯为平纹或波纹的纸芯,将纸芯围绕在带孔的镀锡铁做成的骨架上,以增大强度。为增加过滤面积,纸芯一般做成波浪形。
纸板过滤网的特点是风阻小,对小粒径粒子的净化效率较高,除尘高效,对环境的适应性强,可长期反复利用,维护成本小。
1.2.4 后过滤片
后过滤片采用除尘器滤袋,将由前过滤片处理过的空气进行二次凈化,收集灰尘中没有被前过滤片处理掉的粉尘颗粒,将粉尘留在收集袋中;在此之后,清洁空气被排出,提供非危险洁净的空气。
1.3 主要软件设计
1.3.1 直流电机与舵机控制
通过IDE编程软件,对直流电机进行按键控制。设定按键的输入值,控制黑板擦的移动,使黑板擦到达指定位置,开启舵机,让黑板擦与黑板面贴合,最后启动风扇电机,在擦除的同时将灰尘吸入[5]。
1.3.2 PID算法控制
在任一自动控制系统中,比例、积分、微分(Proportional-Integral-Differential,PID)算法都是应用最广泛的一种自动控制器,其原理简单,操作难度系数低,同时具有高效的控制能力。当控制的偏差过大时,通过调节比例(P)来减小系统的过量偏差;积分(I)对系统数据控制过量的修正,校正因比例(P)因子调节产生的多余控制量;微分(D)对积分(I)进行数据补偿,使得整体系统更加稳定。
根据每单位时间的脉冲数,闭环速度控制被获取(M法测量)来测量电动机速度的信息,并与一目标值进行比较,获得的控制偏差,再由偏差的比例、积分、微分来控制,使偏差趋于零,计算公式如下:
Pwm+=Kp[e(k)-e(k-1)]+Ki×e(k)+Kd[e(k)-2e(k-1)+e(k-2)]
其中,e(k)代表本次偏差,e(k-1)代表上一次的偏差,e(k-2)代表上上次的偏差,Pwm代表增量輸出。
在本系统中只用PI控制,算法公式简化为:Pwm+=Kp[e(k)-e(k-1)]+Ki×e(k)
PID算法是本控制系统的核心,基于源代码上加入PID,提高系统的反应速率与稳定性,使黑板擦可以快速到达指定位置并停止。
2 结语
该智能黑板擦结构简单,操作方便,原材料易获得,制造设备简单,除尘能力强。该系统的控制功能强,不易受干扰,同时可靠性高,控制功能强,具有较高的性价比。
[参考文献]
[1]李海燕,李海宝,赵汗青.智能黑板擦控制系统研究[J].煤炭技术,2003(12):75-76.
[2]史成荫.滚刷式智能机器人黑板擦机理研究[J].科技风,2017(5):11.
[3]任亨斌,宁先雄,黄茂林.精密二维指向调整机构设计[C].宁夏:中国机构与机器科学国际学术会议,2006.
[4]满红,梁迎春,冀勇刚,等.自动控制原理[M].北京:清华大学出版社,2011.
[5]胡震禹,万卉.新型电动黑板擦吸尘器的研制[J].中国现代教育装备,2008(10):42-44.
Abstract:In order to solve the problem that chalk dust endangers the health of teachers and front row students, an intelligent blackboard eraser is designed in this paper. The device uses two deceleration motors as power, and a rudder and a DC motor to control the blackboard eraser; the deceleration motor is installed in the lower left corner of the blackboard to control the movement of the blackboard eraser on the blackboard surface; the rudder is installed on the eraser board, so that when the rudder works, the eraser board and the blackboard surface adhere to each other; the DC motor controls the fan to achieve the purpose of dust collection. Specifically, Arduino is used as the main control software to manipulate the shift control keys, control the eraser to move to the designated position, and then operate the eraser start button, the eraser slowly clings to the blackboard and moves, erases the chalk dust and collects the dust.
Key words:Arduino; key control; two-dimensional; direct current deceleration motor; direct current motor;steering gear
猜你喜欢
大电机技术(2022年5期)2022-11-17
自动化学报(2019年6期)2019-07-23
电子制作(2018年1期)2018-04-04
电子制作(2017年1期)2017-05-17
制造业自动化(2017年2期)2017-03-20
淮南师范学院学报(2015年3期)2015-03-22
电机与控制应用(2015年1期)2015-03-01
舰船科学技术(2015年8期)2015-02-27
