弹载SINS/GPS组合导航系统数据采集与同步设计
2020-03-17 03:32胡陈君高诗尧
中北大学学报(自然科学版) 2020年1期
高 宁,李 杰,胡陈君,高诗尧
(1. 中北大学 电子测试技术重点实验室,山西 太原 030051; 2. 苏州中盛纳米科技有限公司,江苏 苏州 215123)
0 引 言
目前在制导炮弹领域,SINS/GPS组合导航系统具有广阔的应用前景,这主要是由于SINS/GPS组合导航系统将SINS和GPS两者结合起来,既弥补了SINS导航误差随时间积累的缺点,又避免了GPS低动态、 易受外界干扰等劣势,显著提高了导航系统的精度和抗干扰能力[1-2]. 既然要进行组合,就必须要求来自两个子系统的数据在融合时刻时间上统一[3-4]. 文献[5]通过推导SINS/GPS组合导航系统中存在的时间同步误差与Kalman滤波结果之间的定性关系,分析了尤其是当载体处于高动态时,SINS与GPS数据之间的时间同步误差会对Kalman滤波过程引入较大的观测误差,从而影响导航精度. 因此,设计精确可靠的数据实时采集与同步方案对于弹载组合导航系统来说至关重要.
至今,已有许多学者相继提出了不同的时间同步方案. 马云峰等[6]依靠硬件设计来实现数据的同步采集,将DSP作为解算的核心部件,CPLD通过检测GPS的1PPS脉冲对A/D转换器进行同步采样,实现了MIMU和GPS数据在更新时刻的同步采集. 但是此方案忽略了因GPS数据量较大、 传输速率有限造成的传输延时,这在弹载高动态环境下同样会造成较大的导航误差. 游文虎等[7]在硬件上通过中断计时的方式获取SINS更新时刻与GPS的1PPS脉冲到来时刻的时间差,同时采用软件补偿方法,利用二阶保持器对SINS数据在融合点上进行外推拟合. 这种软硬件结合的方法避免了由于IMU频标漂移所引入的误差,但是会占用较多的计算时间,增加导航处理器负担. 李倩等[5]同样采用软件和硬件结合的方法来进行数据的同步,以GPS的1PPS为基准,通过FPGA计数给IMU数据加上时间标签,在数据融合点上寻找时间上最接近的GPS信息和IMU信息进行插值,将数据拟合到同一时刻上. 要想实现这种方法必须先在组合导航处理器中构建一个缓冲区来缓存数据,这样会导致SINS/GPS组合导航结果输出产生延迟,对于实时系统将会产生一定的位置和姿态误差.
本文针对弹载应用环境和SINS/GPS组合导航系统同步误差产生的机理,设计了基于 FPGA+DSP 的小型组合导航计算机平台,并在此基础上采用硬件与软件相结合的方法提出了精确的时间同步方案,最后通过跑车试验验证了同步方案的有效性.
1 组合导航系统硬件电路设计
根据SINS/GPS组合导航系统的工作原理,导航计算机不仅需要不断地进行A/D采样、 GPS数据采集、 时序控制,还要在极短的时间内进行大量的数据计算,这就要求处理器具有很高的运算速度和一定的并行处理能力[8-9]. 对此,本文设计了基于FPGA+DSP的多处理器导航计算机平台. FPGA负责完成A/D采样、 GPS数据采集、 时序逻辑控制,而DSP专做导航解算. 这种多处理器结构的导航计算机在功能上实现了并行处理,大大提高了导航计算机的工作效率,其原理框图如图 1 所示.

图 1 嵌入式组合导航系统硬件结构设计Fig.1 Hardware structure design of embedded combined navigation system
1.1 MIMU数据采集
整个系统有6路MIMU模拟输入信号,包括3路陀螺仪数据和3路加速度数据. 首先,选用两个TI公司的高输入阻抗、 高增益带宽、 低噪声的Rail To Rail高性能运放OPA4340作为A/D转换器的前置放大器,起到对模拟信号进行调理的作用. A/D转换器采用TI公司的16位高速并行模数转换芯片ADS8365. 该芯片具有6个模拟输入通道,分为A、 B、 C 3组,分别由HOLDA、 HOLDB、 HOLDC信号控制A/D转换,6个通道可以同步并行采样转换. ADS8365的工作频率由FPGA通过内部逻辑分频给出,在芯片允许的最高时钟频率5 MHz的工作情况下,每个通道的转换时间小于4 μs. 芯片通过EOC引脚来输出转换完成信号,FPGA获取转换完成信号之后,通过对RD引脚的控制来进行数据的读取. ADS8365时序图如图 2 所示.
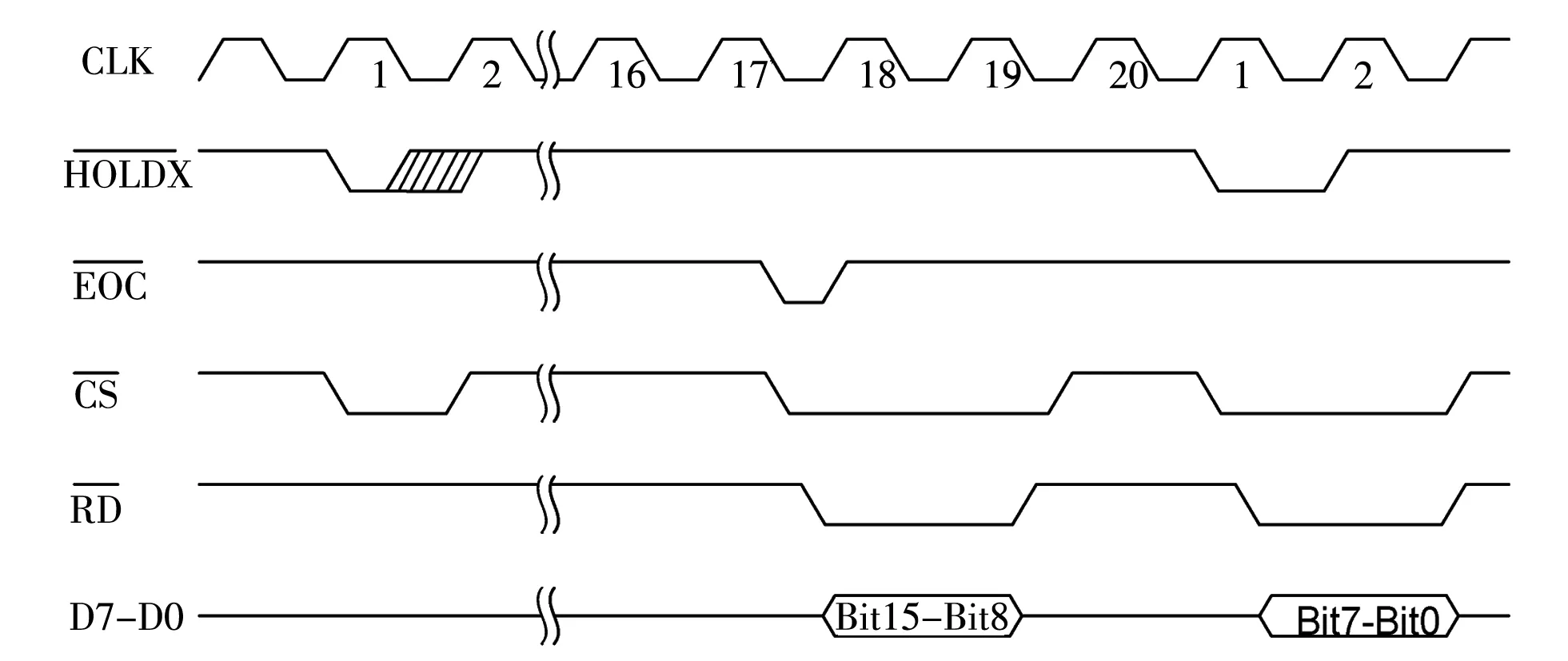
图 2 ADS8365读取时序控制图Fig.2 ADS8365 read timing control chart
1.2 GPS数据采集
系统采用的GPS接收机通过RS-422接口输出定位信息和1PPS脉冲信号,选用电平转换芯片MAX3490将RS-422差分信号转换成TTL电平信号供FPGA直接采集. 其中,将1PPS脉冲信号转换成TTL信号分两路分别接入FPGA与DSP,同时为FPGA和DSP提供时间基准,用于SINS与GPS数据之间的时间同步.
1.3 FPGA与DSP之间的通讯
FPGA通过DSP的高速并行端口UPP传输数据[10]. DSP的通用并行端口UPP外设是一个包含双通道,高速并行的接口. 它拥有专用数据线以及数量很少的控制信号线,可以只接收数据或者只发送数据,还可以双工运行. I/O速度高达75 MHz,每通道数据位宽为8~16 bit. UPP通道信号说明如表 1 所示. 设计中,将两通道均配置为接收模式. FPGA将采集到的MIMU数据编帧放到内部FIFO-MIMU暂存,然后通过UPP-A接口发送给DSP,同理,将GPS数据放到内部FIFO-GPS暂存,通过UPP-B接口发送给DSP.
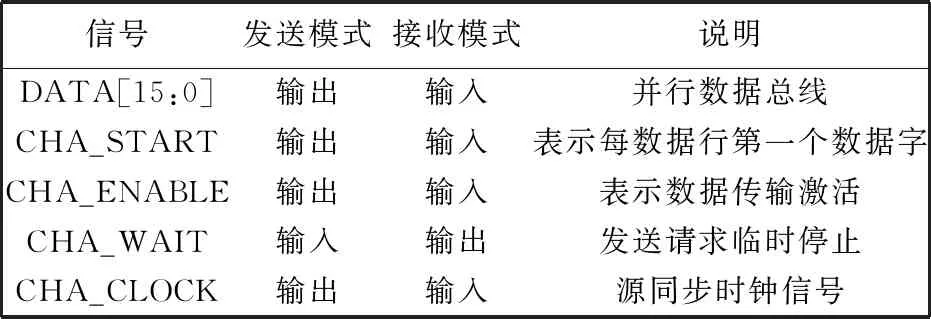
表 1 UPP通道信号说明Tab.1 UPP channel signal description
2 时间同步设计
导致SINS/GPS组合导航数据不同步的原因主要包括以下两点: SINS数据与GPS数据更新频率不同(SINS数据更新频率远大于GPS数据更新频率); 数据传输的延时.
因此,首先对MIMU数据和GPS数据进行更新时刻的统一. GPS接收机严格地在每一个1PPS脉冲的上升沿时刻进行一次伪距、 伪距变化率、 载波相位测量、 GPS标准授时、 定位等测量[11],即1PPS脉冲上升沿时刻就是GPS数据更新时刻,其更新频率就是准确的1 Hz. 把GPS接收机输出的1PPS脉冲接入FPGA,利用FPGA的内部逻辑在1PPS脉冲到来的同时产生一个同步采样脉冲,控制A/D转换器进行采样转换,实现MIMU和GPS数据在整秒更新时刻的同步采集. 同时在FPGA内部以1PPS为基准产生一个计数器,由此计数器产生相应频率的采样脉冲输出,对A/D转换器进行A/D采样,为高频率的SINS解算提供惯性数据. 1PPS脉冲每到来一次便对计数器进行一次清零校对. 如果1PPS由于某种原因未到来,由FPGA内部的计数器作为MIMU采样信号的时基标准,并不影响SINS工作. 至此便完成了MIMU数据与GPS数据在更新时刻上的时间同步.
GPS数据通过串口传输给FPGA,由于数据量较大且串口传输速率有限,必定会产生一定的传输延时,延时从几毫秒到几十毫秒不等. 在SINS高采样率的情况下,此延时甚至大于几倍的SINS解算周期,这势必会在高动态环境下造成较大的导航误差[12]. 而与GPS数据传输延时时间相比,A/D转换时间、 FPGA与DSP的数据传输时间都在几微秒以内,可以忽略.
为了补偿GPS数据传输延时造成的误差,必须记录延时时间. 将1PPS作为中断接入DSP,当1PPS脉冲到来时刻,DSP缓存该时刻的SINS的速度、 位置信息. 经过Δt的时间,GPS数据接收完成,此时可能并不是SINS数据更新时刻,故将接下来的第一组SINS时刻作为信息融合时刻,如图 3 所示. 由于在GPS数据传输时间段内已进行了多次惯导解算,而在短时间内SINS可保持较高的精度,因此可用SINS的速度、 位置增量来外推融合时刻的GPS信息,外推算法如下
式中:XSINS(TPPS)为1PPS脉冲到来时刻DSP缓存的SINS数据;XSINS(TPPS+Δτ)为信息融合时刻SINS数据;XGPS(TPPS)为1PPS脉冲时刻的GPS测量数据. 这样,就完成了SINS与GPS数据在融合点上的时间同步.
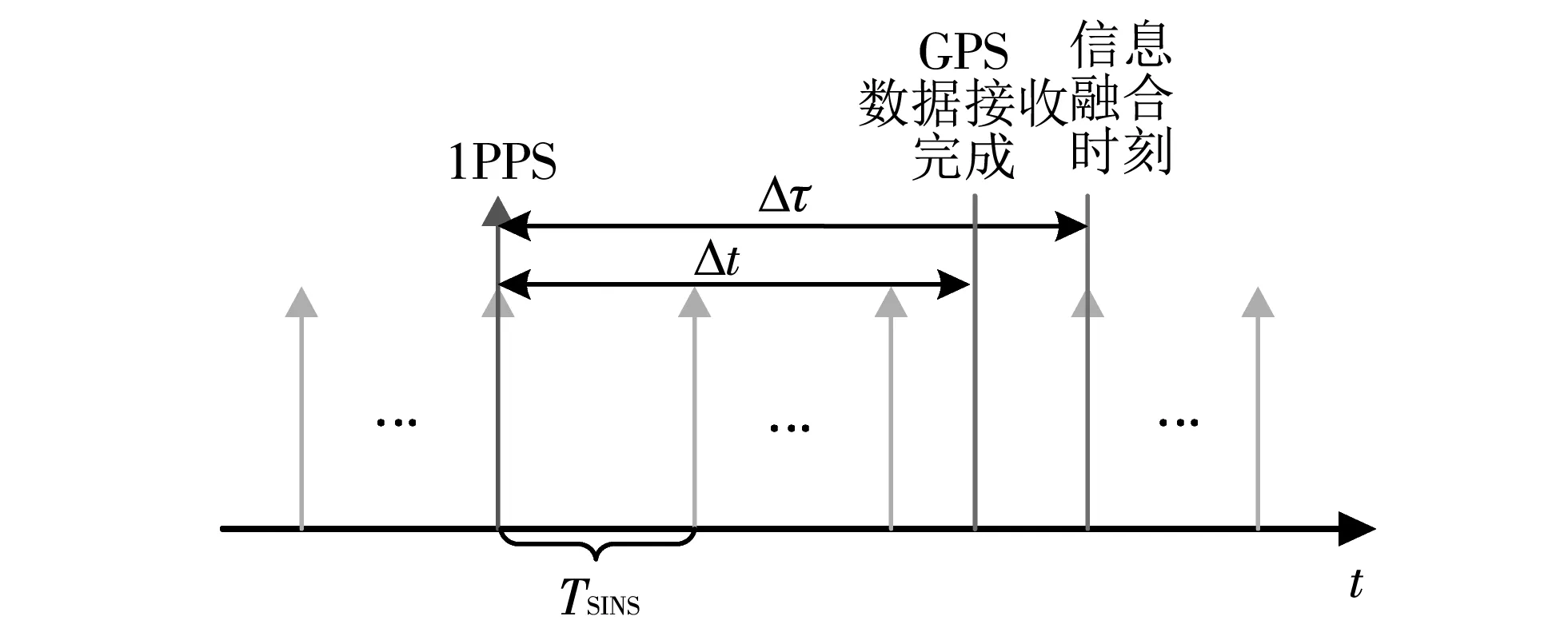
图 3 SINS和GPS数据同步示意图Fig.3 Schematic diagram of SINS and GPS data synchronization
3 实验验证
系统采用的MIMU包含3个单轴CRM100 MEMS陀螺仪和3个单轴MS9000 MEMS加速度计,GPS接收机由国内某单位生产,其数据更新频率为1 Hz,串口通讯波特率为115 200,一帧数据包括120字节. SINS采样频率为500 Hz,即每2 ms进行一次惯导解算,每1 s接收到GPS数据后进行一次组合滤波. 导航计算机的硬件平台如图 4 所示.
图 4 导航计算机硬件平台Fig.4 Navigation computer hardware platform
为了验证所提方案的可靠性和有效性,设计了以高精度母惯导为参考基准的跑车试验. 由于地面跑车试验车速较慢,动态性较低,无法满足弹载高动态条件,人为对GPS数据传输加入500 ms 的延时,即在FPGA内加入一个延时,在接收到GPS数据后延时500 ms再发送给DSP进行组合解算,以此来验证同步方法能否在弹载高动态条件下有效地提高组合导航精度. 试验中,采用两套相同的系统做比较,其中一套采用本文提出的同步方法,另一套则在GPS数据接收完成后直接做数据融合,不进行同步补偿. 试验输出的导航结果对比图如图 5 所示.
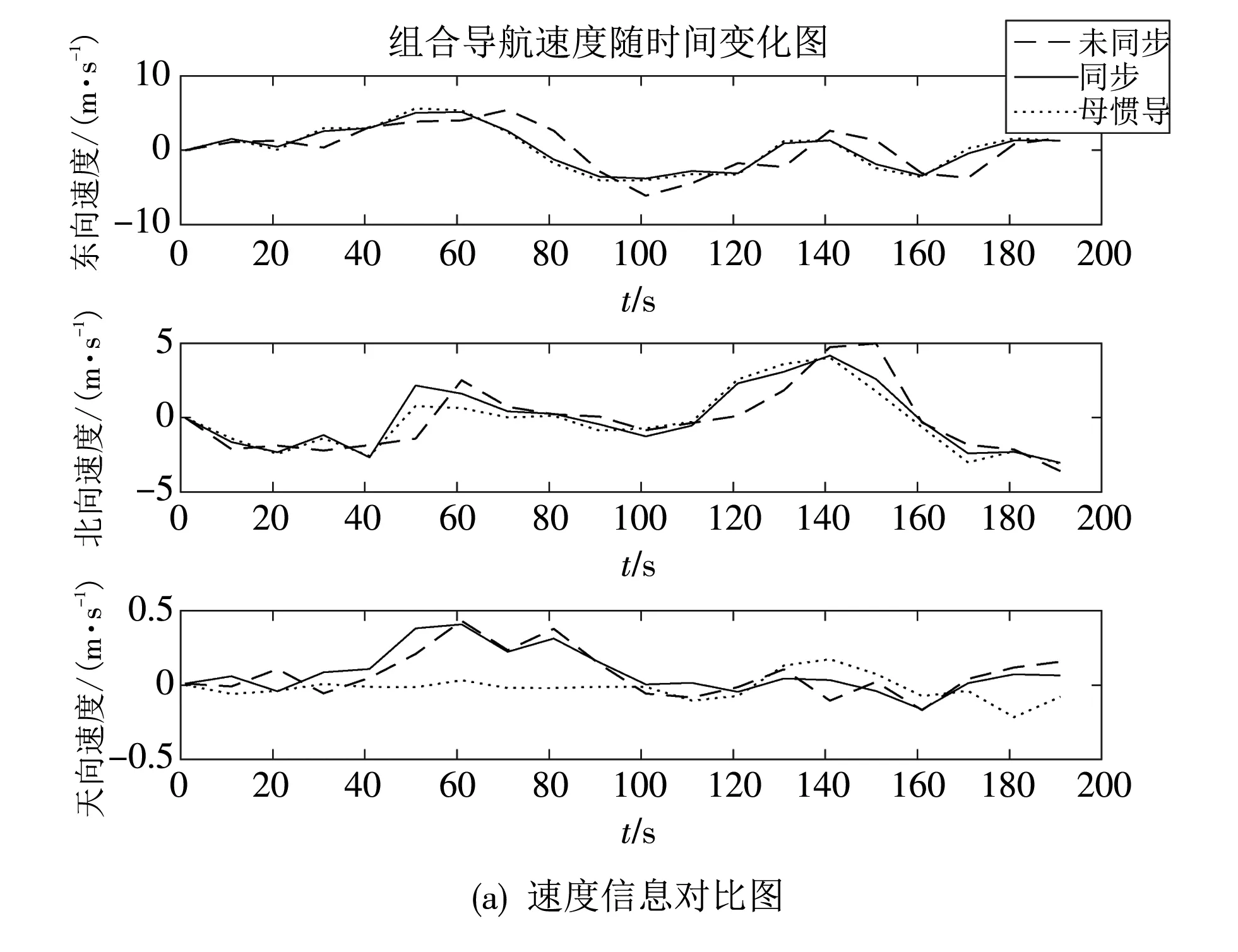
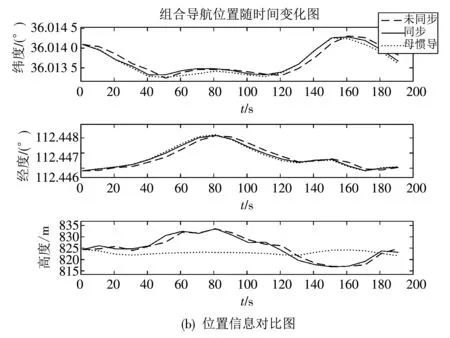
图 5 时间同步前后导航结果对比图Fig.5 Comparison of navigation results before and after time synchronization
从图 5 可以看出,200 s的高动态组合导航模拟实验中,没有经过时间同步处理输出的三维速度、 三维位置信息与高精度母惯导输出的结果存在较大的偏差,而经过时间同步处理后输出的导航结果与母惯导输出的结果吻合度较高,速度和位置信息精度得到了明显的提高. 时间同步前后误差(RMSE标准)对比结果如表 2 所示.
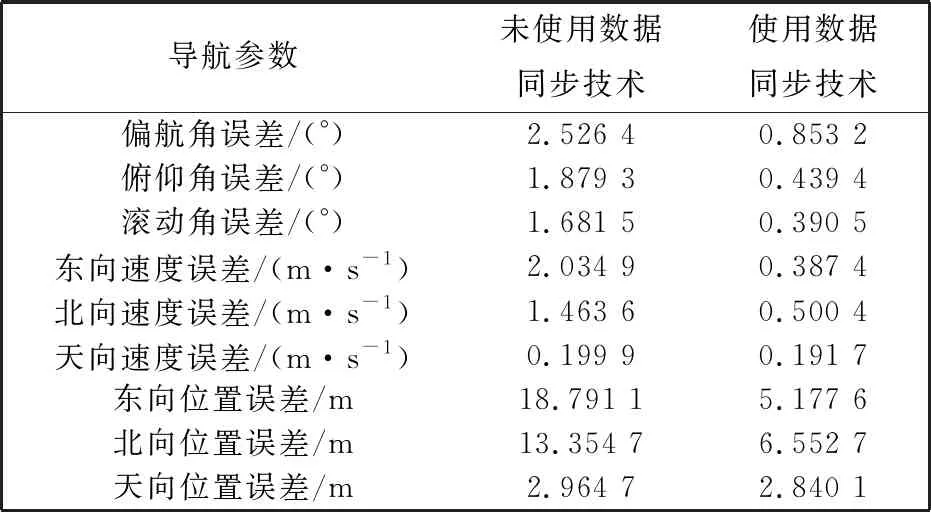
表 2 跑车试验组合导航参数对比Tab.2 Comparison of combined navigation parameters of the vehicle experiment
从表 2 中可以明显看出,采用所设计的组合导航时间同步方法显著提高了系统的定位、 定姿精度,可以满足实际应用的要求.
4 结 论
本文通过对比不同的SINS/GPS组合导航时间同步方法,针对弹载高动态环境,设计了基于FPGA+DSP的小型组合导航系统计算机平台,提出了软、 硬件相结合的时间同步方法. 将GPS接收机提供的1PPS脉冲同时接入FPGA与DSP,利用FPGA实现MIMU与GPS数据在整秒时刻的同步采集,通过计数产生相应的A/D采样频率,利用DSP在信息融合时刻对GPS数据进行外推拟合,实现了SINS与GPS数据的时间同步. 时间同步过程简单,同步精度高,并且避免了由于频标漂移带来的误差. 为了验证方法的有效性,进行了跑车试验,试验结果表明所设计的时间同步系统可以有效地提高组合导航系统的定位精度.
猜你喜欢
有色设备(2021年4期)2021-03-16
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
电子制作(2019年14期)2019-08-20
北京航空航天大学学报(2017年10期)2017-04-20
电子制作(2017年19期)2017-02-02
百科探秘·航空航天(2016年9期)2016-12-01
太空探索(2015年5期)2015-07-12
对联(2015年22期)2015-06-11
汽车维护与修理(2014年10期)2014-02-28
汽车与新动力(2013年3期)2013-03-11