基于西门子S120的自动化实践教学平台
2020-03-16 07:30:52朱义强
阜阳师范大学学报(自然科学版) 2020年1期
魏 磊,李 季,朱义强
(阜阳师范大学物理与电子工程学院安徽阜阳236037)
关键字:S120;实践教学平台;自动化;运动控制;能力培养
自动化类专业主要是培养基础扎实、知识面宽,实践能力强,具备创新意识和创新能力的专业技术人才[1-2],具有应用性和实践性很强的专业特色,决定了实践教学在专业人才培养中的重要性[3-4]。实践教学是应用型人才培养的关键,也是进行教学改革的难点[5-8]。本文首先分析自动化类实践教学平台的一些不足之处,然后阐述基于西门子SIANMICS S120 系统构建运动控制自动化实践教学平台的方法,分析该平台在实践教学中对培养学生实践能力和创新思维的意义。
1 自动化类专业实践教学平台现状
自动化类专业大多实验教学平台存在以下不足之处:
(1)现阶段多数实验教学平台仍然是纯粹由硬件电路组成,可开设实验项目固定,多数实验平台的参数和功能都已固化,不具备可拓展性,也无法满足二次开发的需求。
(2)基于现有实验平台开展的实践教学多为基础演性或验证性实验,学生不能自主进行设计或者创新实验。根据现有的实验平台,大多是根据实验指导书按照既定的步骤设置一些既定的参数,过度强调验证教材中某一定理和结论,极大地限制了学生的创新思维。甚至一些实验平台仅给出结果观察窗口,而中间过程与变量的状态不易查看和操作,这将不能较好的激发学生的学习兴趣,训练学生的分析能力[9-10]。
(3)实验平台陈旧,实验内容和所采用的实验设备滞后于业界;因实验平台不具备可扩展性,教学内容常年不能得到更新,无法满足实践教学的与时俱进。
2 S120 运动控制系统组成与组态
SIANMICS S120 是西门子公司最近推出的集V/F 控制、矢量控制、伺服控制为一体的多轴驱动系统。S120 由控制单元、整流模块和电机模块组成,如图1 的虚线内的各模块所示。系统采用DRIVE-CLIQ 总线通讯和硬件自动识别技术,上位机调试软件STARTER 具有图形化、参数化的调试和监控功能[11],使得S120 运动控制系统易于入手。S120 不需要PLC 可直接与HMI 实现通讯[12]。学生可以通过对控制单元的编程以及基本定位功能灵活组合,实现复杂的运动控制算法。
2.1 系统组成
S120 各模块通过DRIVE-CLIQ 接口互联,所有的SINAMICS S120 模块均有一个电子铭牌,该铭牌包含相应模块的所有重要技术参数,例如,在电机的电子铭牌中就有电机等效电路的相关参数和安装于电机内部的编码器的参数,控制单元可以通过DRIVE-CLIQ 总线自动读取这些参数,而不必在系统组态时手动输入。S120 多轴运动控制系统系统结构如图1。
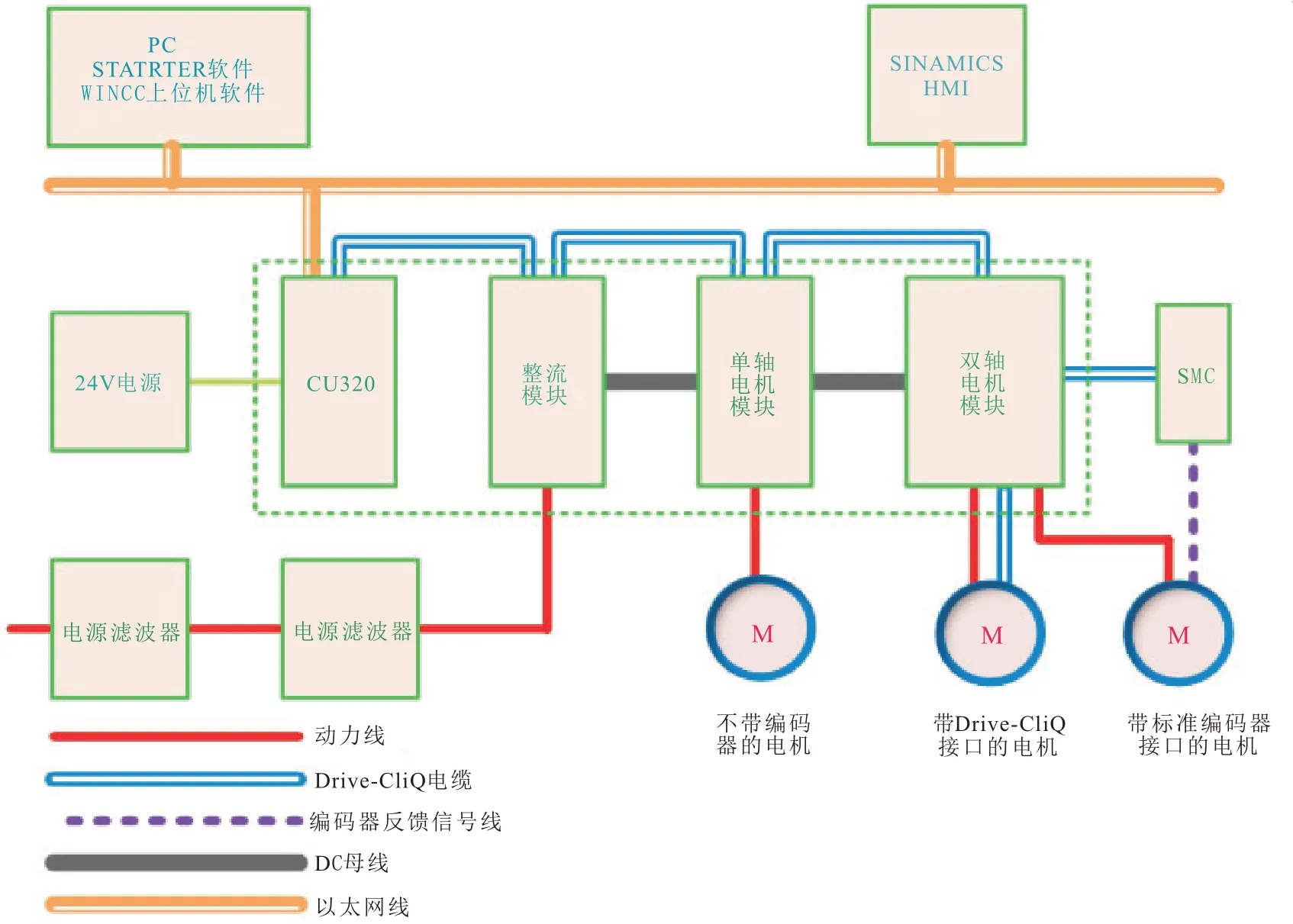
图1 S120 运动控制系统组成
整流模块将三相交流电整流成直流电,整流装置分为基本型电源、非调节性电源和调节性电源三种类型,基本型电源不具有能量回馈能力且直流母线电压不受控,后两种可回馈能量,调节型电源具有电压受控,可自行调节,不受电源电压波动的影响等优点[13]。电机模块及逆变模块,分为单轴电机模块和双轴电机模块,受控于控制单元的算法。各电机模块之间共享直流母线,相互可以进行能量的交换[14]。
2.2 系统组态
STARTER 软件是SINAMICS 系列驱动器的调试软件,它能够完成系统的组态、调试和编程,给用户提供了图形化的调试和编程界面,可在线和离线编辑参数,使用简便、功能强大。
PC 通过STARTER 软件与S120 的通讯方式有PROFIBUS-DP、以太网和RS232 三种,不论那种方式,PG/PC 接口的正确配置是建立通讯前提。在进行驱动轴配置时,对于带DRIVE-CLIQ接口的西门子电机,控制单元可以通过DRIVECLIQ 总线直接读取电机和编码器参数,而且编码器信号也通过DRIVE-CLIQ 总线反馈。对于不带DRIVE-CLIQ 接口的电机,组态时需要手动输入电机和编码器数据,而且编码器信号需通过SMC编码器模块与电机模块连接。在配置电机参数时可根据控制需要选择扩展设定通道、工艺控制器、基本定位和扩展信息监控功能。组态完成后使用控制面板测试组态信息是否正确。
3 基于DCC 的运动控制实例及分析
DCC(drive contol chart)是西门子专为SINAMICS 变频器和SIMOTION 控制器提供的一种可编程的环境。DCC 功能块库提供了大量的控制块、算法块和逻辑块,DCC 程序结合基本定位功能可实现复杂的运动控制功能。
3.1 控制任务描述
(1)闭合开关DI1,电机使能,且将电机的当前位置设置为初始零点位置;
(2)闭合开关DI2,电机顺时针转动;在任意时刻断开开关DI2,电机反转回到初始位置,反转转动的角位移与正传角位移相等。
(3)闭合开关DI3,电机以顺时针转动;在任意时刻断开开关DI3,电机将以最短的行程回到初始位置。
3.2 逻辑控制程序及分析
采用JOG1 和MDI 实现(2)和(3)的功能,MDI 设置为绝对位置模式;(2)中通过DCC 程序将轴类型设置为线性轴,(3)中通过DCC 程序将轴类型设置为模态轴。闭合开关DI2,触发JOG1,断开DI2 触发线性轴模式的MDI;闭合开关DI3,触发JOG1,断开DI3 触发模态轴模式的MDI;DCC 程序如图2。
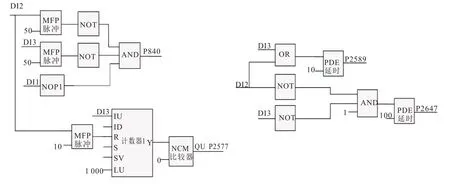
图2 实例DCC 程序
由左半部分程序可知,DI2 闭合则P2577 复位,DI3 闭合P2577 置位;而参数P2577 的数值修改须在参数P840 接收到一个上升沿脉冲后才生效,因而每次闭合DI2 或DI3 时都对P840 施加一个负脉冲,负脉冲的上升沿使P2577 参数修改生效,实现线性轴和模态轴的切换。由于DI2 和DI3 闭合时参数840 的下降沿与P2589 的上升沿重合,这将会触发一个F7490 错误[15],为避免错误在触发参数P2589 之前加100 ms 开通延时。由右半部分的程序可知,DI2 或DI3 的闭合会触发P2589 对应的点动1;断开DI2 或DI3 时会触发P2647 对应的MDI 功能,从而触发线性轴或模态轴工作。在线性轴模式下电机回转的角位移与正转的相等,而在模态轴模式下将以最短位移回程。
3.3 验证与分析
Starter 软件具有Trace 录波功能,该功能可记录下重要参数实时运行数据对应的曲线,记录的参数曲线便于调试人员的分析问题。为验证上述算法,记录开关r722.1(DI2)和r722.2(DI3)和位置参数r2521 的数据,波形如图3。由可见,在A时刻开关DI2 闭合,则电机的位移将线性增大,B时刻断开DI2 位移将减小至零,这一过程说明在开关DI2 断开时电机将反向转动且回转的角位移与正转时相等。C 时刻闭和开关DI3,当D 时刻断开DI3 时电机已经转过半圈,此时若依最短位移回到初始点电机应该继续正转到零点处,因而图中D 时刻之后位移继续增加直至360°(0°)处。在E 时刻再次闭合开关DI3,F 时刻电机尚未转动半圈时断开开关DI3,这是回到初始点的最短路径应当是反转,因而在F 点位移值将减小至零。可见上述逻辑控制程序可实现任务的控制要求。
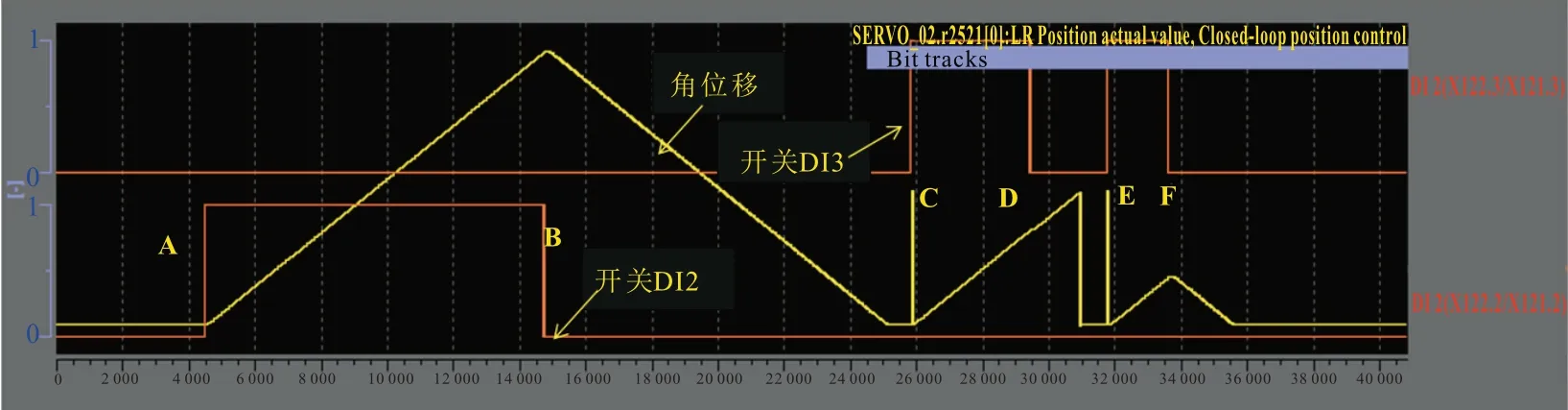
图3 控制程序验证曲线
3.4 问题的进一步探讨
实际的运动控制任务可能需要多个基本运动环节的组合才能实现,而S120 控制电机运动的基本模块只有点动1、点动2、MDI、程序步等,如何利用有限的驱动资源实现复杂的控制任务是开发S120 驱动控制系统要考虑的关键问题。S120 参数化控制与调试以及关键参数可通过程序在线修改的特点,给系统开发提供了极大的灵活性。可以根据不同运动工况通过DCC 程序改变控制参数数值,这样不仅可以使得基本模块进行功能切换,而且可以实现模块的重复利用,类似于程序的调用。例如,在上面的例子中通过对P2577 的修改实现了MDI 模块线性轴与模态轴功能的转换。
4 小结
把S120 运动控制系统这一典型的自动化设备作为实践教学平台,使得教学更贴近工业实际。本文介绍了基于S120 的实践教学平台组成原理、系统组态方法,从运动控制实例可见,S120参数化和图形化调试与控制方式,使得学生使用该平台时易于入手,而其控制单元灵活的编程功能和参数可实时修改的特点给学生留下了极大的开发和练习的空间。通过复杂运动控制的程序设计,采用DCC 的逻辑、算术、数据类型转换等模块的编程与调试,结合DCC 变量可在线监控功能,可以很好的训练学生发现问题、分析与定位问题、解决问题的能力。同一运动控制任务可以采用不同的算法实现,能够极大的提高学生的逻辑思维和创新思维能力。
猜你喜欢
防爆电机(2021年3期)2021-07-21 08:13:00
防爆电机(2021年1期)2021-03-29 03:02:52
电机与控制应用(2021年12期)2021-02-28 07:55:22
河北农机(2020年10期)2020-12-14 03:13:42
电子制作(2018年12期)2018-08-01 00:47:44
制造技术与机床(2017年6期)2018-01-19 02:41:21
凿岩机械气动工具(2017年2期)2017-07-19 10:21:13
电子制作(2017年19期)2017-02-02 07:08:38
能源(2016年2期)2016-12-01 05:10:31
工业设计(2016年11期)2016-04-16 02:49:22