空间机器人遥操作系统设计
2020-03-10 02:15:14,,
机械与电子 2020年2期
,,
(1.重庆交通职业学院,重庆 402247;2.哈尔滨工业大学机器人技术与系统国家重点实验室,黑龙江 哈尔滨150001;3.中国科学院深圳先进技术研究院,广东 深圳 518055)
0 引言
一方面卫星和空间站对于人类的生活影响日益增长,另一方面太空的恶劣环境和有限的燃料使得航天器寿命较短,因此在轨维护成为了重要的研究方向[1]。考虑到太空的恶劣环境和节约成本等因素,用空间机器人代替航天员执行任务成为了近年来的研究热点。然而,由于当前科技水平的限制,目前无法实现全自动的空间机器人。因此能够在地面帮助人类操纵空间机器人的遥操作系统成为了当下的一个重要研究主题[2-9]。
近年来,各国都开展了空间机器人及其遥操作系统的研究。比如德国早在1993年做了空间机器人实验(ROTEX)[7],日本在1997年发射了ETS-7号卫星,并在接下来的几年也做了丰富的遥操作实验[6]。这些实验不仅验证了空间目标捕获和对接技术,还为未来空间站上的机械臂及其遥操作系统的设计积累了丰富的经验。除了日本的ETS-7号和德国的ROTEX成功完成实验外,正在研制中的空间机器人还有美国的SUMO/FREND和欧空局的TECSAS/DEOS。
中国在过去的十年里也开展了空间机器人方面的实验研究,并于2013年发射了试验七号空间机器人实验平台,实验目的是验证在轨维护技术, 实验系统由2个子系统组成,分别是在轨子系统和地面子系统[10]。本文以试验七号为实验平台对其地面遥操作系统进行设计。
1 空间机器人实验系统组成
1.1 在轨子系统
在轨子系统由3个子系统组成,分别是自由漂浮平台子系统、空间操作机器人子系统和目标卫星子系统。其中空间操作机器人子系统由1个6自由度机械臂、手眼相机和2个手指构成。空间操作机器人子系统和目标卫星子系统分别固连在自由漂浮平台的相邻2个平面上[5],如图1所示。
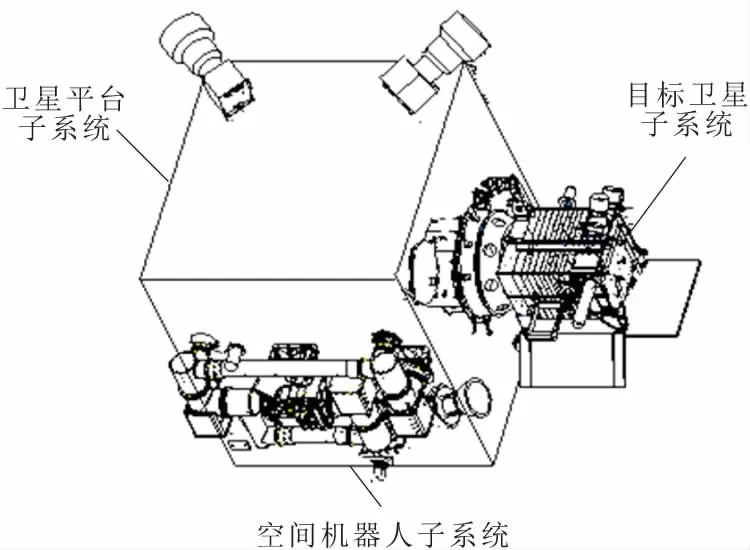
图1 空间机器人在轨子系统
1.2 地面子系统
地面子系统包括遥操作子系统和遥测控子系统(TM/TC)。TM/TC是在轨子系统和遥操作子系统之间进行数据交换的中枢,并且与地面遥操作子系统之间通过UDP组播的方式相连。TM/TC一面将在轨子系统上得到的遥测数据传送给地面遥操作系统,另一方面又将地面遥操作数据以指令的形式发送给在轨子系统。同时还将对双向传送的数据进行实时监控,地面子系统和在轨子系统的链接关系如图2所示。

图2 在轨子系统和地面子系统的链接关系
1.3 遥操作子系统
地面遥操作系统由图像监控软件、预测仿真软件、任务规划软件、操作手柄和操作者组成。
a.图像监控软件。图像监控软件通过UDP组播和遥测子系统相连,以4 Hz的频率接收空间机器人的2个手眼相机和卫星上一个全局相机所拍到的图片,所有相机都使用黑白的CCD相机。图像监控软件可以辅助操作者来判断空间机器人的当前工作状态是否良好,还可以和接收到的关节数据相互验证并给操作者以直观感受。
b.预测仿真软件。预测仿真软件通过TCP/IP协议与任务规划软件相连,并实时接收任务规划发过来关节角度数据,通过实体模型和虚线模型分别显示当前规划关节角和接收的滞后关节角,以100 Hz的频率进行刷新显示。预测仿真软件使用Open Inventor同时进行实时和超前碰撞检测,并将碰撞检测信息实时传送给任务规划软件。
c.任务规划软件。任务规划软件通过UDP组播和TM/TC相连发,并通过TCP/IP和预测仿真软件相连进行实时显示和接收碰撞检测结果,任务规划软件的功能为:关节空间或笛卡尔空间下的轨迹规划功能;单关节锁死时的容错规划功能;主从/双边遥操作功能;实时数据显示与检测;数据保存功能。
d.操作手柄。本系统选用Haption公司的Virtuose 6D35-45型力反馈设备作为主端操作手柄。手柄通过TCP/IP与任务规划软件相连,任务规划软件实时的读取手柄的位置和姿态信息并通过坐标变换变换为空间机器人的位姿增量。
遥操作子系统的各部分链接关系如图3所示。

图3 遥操作子系统结构
2 遥操作子系统的设计与实验
2.1 实时遥编程功能
由于卫星轨道高度较低,相应的时间窗口较短,所以要实现在线自定义遥编程就需要快速判断设计的路径是否合理。“实时遥编程功能”中的“实时”指的是将规划后的轨迹以10倍于正常运行的速度发送给预测仿真软件并进行合理性验证,如果轨迹设计合理则再向实际卫星发送。
由于实际机械臂响应能力的限制,只有限制发送的关节角速度和角加速度在一定的范围内才能保证实际机械臂的跟踪精度。在给出终止位置和规划时间后,任务规划软件会根据生成的数据计算运动过程中最大角速度和角加速度,如果超出实际机械臂的响应能力则给出提示并给出最小的规划时间。然后再将验证后的轨迹发送至空间机器人执行。关节空间规划包括从当前位置到安全位置,从安全位置到观测起始位置。笛卡尔空间轨迹规划包括从观察起始位置到观测终止位置的直线轨迹规划和从圆弧轨迹规划。基于观测任务的直线轨迹规划如图4所示。

图4 直线轨迹规划
在笛卡尔空间下的起始坐标为(1.045 9, 0, 0.114 9),终止坐标为(1.046, 0.6, 0.115)。在进行直线运动的过程中,末端姿态始终保持不变,其Z-Y-X欧拉角为(180, 0, 0)。圆弧轨迹规划如图5所示。

图5 直线轨迹规划
2.2 遥操作功能
当操作者进行观测成像任务时,根据任务的不同可以分为3种操作模式。
2.2.1 位置控制模式
操作手控器时只能改变空间机械臂末端的位置。当操作者对远处物体进行观测的时候,希望尽可能保持姿态不变,而只改变手眼相机的位置。将当前的手柄位置设置为坐标原点,每250 ms将当前位置与原点位置做差得到增量向量。将增量向量通过坐标变换变换到空间机器人操作平面下,再将该增量累加到空间机器人的当前位置上。最后进行逆运动学计算得到空间机器人的关节角数据并发送。
2.2.2 姿态控制模式
操作手控器时只能改变空间机械臂末端的姿态。为了减少操作者的负担,姿态控制采用提取角速度增量的方法来实现。按住手柄右键并旋转,得到手控器角速度增量,按下手柄左键则清零角速度增量。将角速度增量通过坐标变换变换到空间机器人操作平面下不断累加,再实时进行逆运动学计算得到关节角数据。
2.2.3 位姿控制模式
操作手控器时同时改变空间机械臂末端的位置和姿态。
遥操作系统具有主从和双边遥操作2种控制模式。因为空间机器人的机械臂没有安装力觉传感器,所以遥操作的主端和从端之间只能相互传递关节的位置信息。这样,在双边力反馈模式下,反馈力的计算只能根据主端输入的笛卡尔位置和当前收到的从端位置的差值来计算,即
Fmc=Kf(xm-xsd)
(1)
Fmc是计算得到虚拟反馈力;Kf是比例系数;xm和xsd是任务规划软件在主端发送和接收的末端位置数据。
在非接触环境下自由运动时,时延的大小和变化将以反馈力的形式传递给操作者,便于操作者根据时延大小实时调整手柄运动的速度。图6和图7显示了在位置控制模式下执行非接触任务时的实验,时延为7 s。
以上仿真实验说明了空间机器人操作者可以根据时延大小实时调整手柄运动的速度,验证了遥操作系统基于时延的双边力反馈功能的有效性。
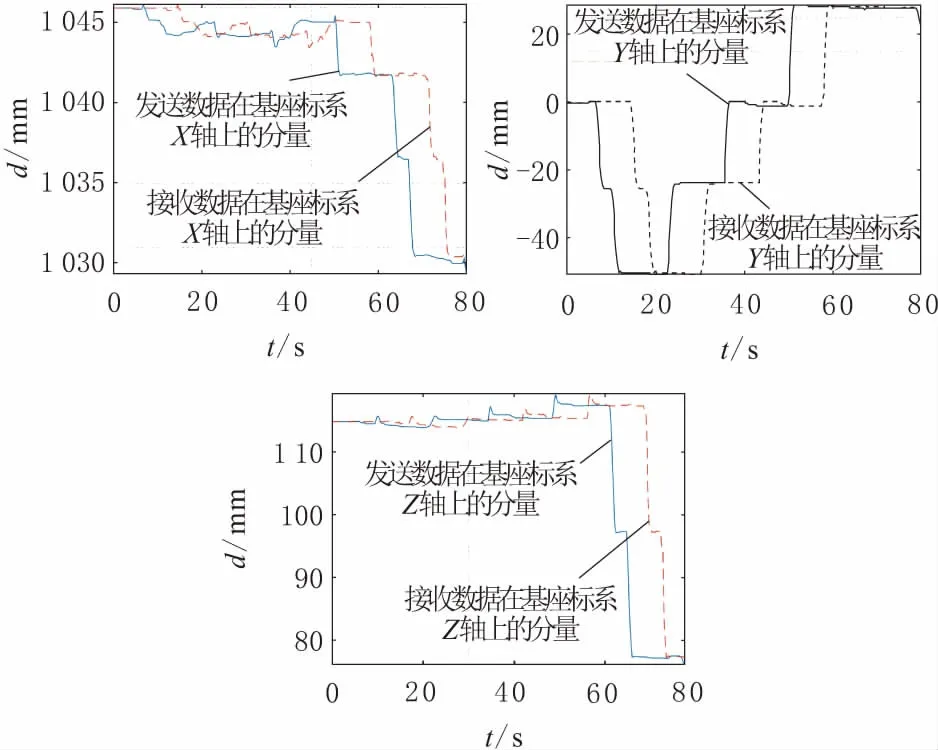
图6 发送和接收的位置数据

图7 计算的虚拟反馈力
2.3 故障关节轨迹规划
如果空间机器人在运行的过程中某个关节故障并锁定在某一角度值,那么如何使其仍旧完成指定的观测和抓捕任务,将是一个值得研究的问题。因此模拟了在2关节故障的情况下,通过容错规划保证固定姿态来完成观测成像任务。实验设计中使用数值逼近的方法在原轨迹规划的每个中间点附近寻找能够保证姿态变动较小的最近的点。比如要执行沿着直线进行的观测任务的轨迹,在进行这种处理后能够得到在关节2故障下的规划轨迹如图8所示。
由图8可以看到通过容错规划前后,X轴、Y轴上的轨迹不变,Z轴上的轨迹由直线变为曲线,总轨迹变为曲线。但因关节角不变,保持相同的姿态仍旧可以完成指定的观测和抓捕任务。
如图9所示,假设故障关节角度锁定在-123.8°。在原始轨迹规划下,关节2的初始角度从-120.21°变为-127.32°,变化比较大;而在容错规划下,关节2角度保持近似不变。作为故障轨迹规划中最重要的优化指标,关节角度变化越小,越能保证空间机器人以固定姿态完成观测成像任务。

图8 笛卡尔空间中的原始观测轨迹与容错规划轨迹

图9 关节2在原始规划和容错规划下的角度变化
3 碰撞检测实验与额外时延法
在遥编程模式下,可以利用实时遥编程功能对路径的合理性做充分的验证以避免碰撞的发生。在遥操作模式下,由于人为操作带有一定随机性,因此实时的碰撞检测更加重要。本系统的碰撞检测功能是利用OpenInventor自带的SoBoundingbox类和SoCollisionManager类实现的,其给每个导入的部件建立了包围盒(OBB)。当检测到碰撞时,3D预测仿真软件以100 Hz的通信频率向任务规划软件发送碰撞检测信号。
为了增强碰撞检测功能,在任务规划和数据管理软件向遥测中心发送时增加了0.25nds额外的时间延时。当预测模型没能正确预测碰撞而使得当前规划的轨迹点发生碰撞时,取出最先存入的没有发生碰撞的指令来将队列填满,保证发出的指令都是远离碰撞点的安全数据。这样能够在发生碰撞时,避免难以找到合适的方向操作机械臂末端从碰撞点离开的问题。额外的延时是由先入先出队列组成,队列中依次装满nd+1条即将发送的指令,其与遥操作子系统之间的关系如图10所示。
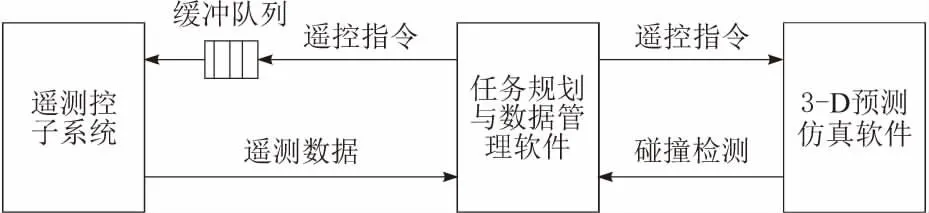
图10 数据队列和遥操作子系统数据流
当碰撞检测发生时,队列里面立即填满最先进入的数据,这样可以确保实际所发送的指令停止在预测模型与包围盒碰撞之前,如图11所示。
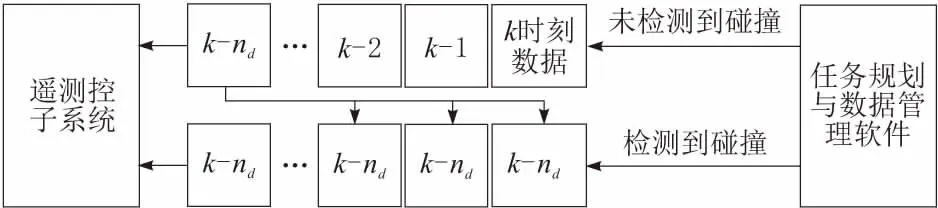
图11 数据队列和遥操作子系统数据流
当k时刻未检测到碰撞时,队列里即将出栈的是k-nd时刻数据,刚刚进栈的是当前的k时刻数据。此时,如果任务规划与数据管理软件接收到了来自3D预测仿真软件的碰撞检测信号,说明k时刻的指令数据会引起碰撞,则立即用k-nd时刻未发生碰撞的数据将队列填满。碰撞检测与额外时延的仿真如图12所示。

图12 碰撞检测与额外时延法的仿真实验
当预测仿真模型与卫星本体包围盒发生碰撞后立即回弹到0.25nds秒前未发生碰撞的安全位置,并且在任务规划与数据处理软件中给出发生碰撞的提示。该仿真实验说明了在遥编程模式下,可以利用实时遥编程功能充分验证路径合理性,以此避免发生碰撞,验证了碰撞检测功能的有效性。
4 结束语
试验七号空间机器人实验平台已于2013年发射升空,实验任务包括基于手眼相机的自主捕获技术和地面遥操作技术,为未来中国空间在轨维护任务和中国空间站机械臂的设计打下基础。本文介绍了试验七号空间机器人的地面遥操作系统的设计,也为未来空间站机器人的遥操作系统设计打下了实验基础,能帮助更多研究者快速、直观、可靠地规划空间机器人轨迹。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:06:44
汽车工程师(2021年12期)2022-01-17 02:29:44
铁道通信信号(2020年3期)2020-09-21 09:13:00
读友·少年文学(清雅版)(2020年4期)2020-08-24 07:36:26
读友·少年文学(清雅版)(2020年3期)2020-07-24 08:57:04
铁道通信信号(2020年10期)2020-02-07 01:01:12
铁道通信信号(2018年8期)2018-11-10 05:15:44
现代装饰(2018年5期)2018-05-26 09:09:39
电子测试(2018年1期)2018-04-18 11:53:00
中国三峡(2017年2期)2017-06-09 08:15:29