
无人机遥感技术在精量灌溉中应用的研究进展
2020-03-09 07:35:18韩文霆张立元牛亚晓
农业机械学报 2020年2期
韩文霆 张立元 牛亚晓 史 翔
(1.西北农林科技大学水土保持研究所, 陕西杨凌 712100; 2.西北农林科技大学机械与电子工程学院, 陕西杨凌 712100)
0 引言
21世纪农业面临的最大挑战是如何在有限土地和水资源情况下满足人口增长和社会经济发展对农业生产提出的更高要求[1]。预计到2050年,人口和社会经济增长将使目前的粮食需求翻一番,发展中国家为了应对这一挑战,谷物产量需要增加40%,净灌溉用水需求将增加40%~50%[2]。同时,全球气候变化造成的干旱等自然灾害加剧,全球生态环境保护需求对单位灌溉用水下的作物产量提出了更高的要求[3]。在此背景下,以提高农业用水效率为目标的精量灌溉成为未来农业灌溉的主要模式[4]。
精量灌溉的前提条件是对作物缺水的精准诊断和科学的灌溉决策。在土壤-植物-大气连续体(Soil-Plant-Atmosphere continuum,SPAC)中,用于作物缺水诊断和灌溉决策的定量指标有3种:①根据农田土壤水分状况确定灌溉时间和水量,考虑的因素包括不同作物适宜水分上下限、不同土壤条件、土壤水量平衡方程及参数选择等。②根据作物对水分亏缺的生理反应信息确定是否需要灌溉,指标包括作物冠层温度相对环境温度的变化、茎果缩涨微变化、茎/叶水势、茎流变化等。③根据作物生长的小环境气象因素的变化确定灌溉的时间和作物的需水量,通过气象因素确定作物的蒸腾蒸发量,进行灌溉决策[5]。
目前,上述用于作物缺水诊断和灌溉决策定量指标的信息获取技术主要基于田间定点和地面车载移动监测[6-7]。田间定点采用无线传感器网络技术,可以实现大面积监测,但传感器布点数量是个问题,布点少代表性差,不能满足精量灌溉要求,布点多会增加成本,也会影响耕作。地面车载移动监测克服了地面布点的缺点,但对于大面积农田灌溉来说仍然存在成本高的问题。利用卫星遥感技术可以快速获取大面积的土壤水分和作物蒸散发信息,国内外研究均取得了一定进展,但由于存在时空分辨率低、受天气影响大等问题,在农田尺度上指导精准灌溉的实际应用中受到很大限制。精量灌溉技术的发展迫切需要一种高精度、高效率的大范围农田土壤和作物水分信息快速感知技术。
无人机遥感技术近年来在农情监测中开始得到广泛应用。无人机起降灵活,可以机载多光谱、热红外、高光谱等相机,从根本上解决了卫星遥感由于时空分辨率低而导致的瞬时拓延、空间尺度转换、遥感参数与模型参数定量对应等技术难题。无人机遥感从技术上也克服了地面监测效率低、成本高、影响田间作业等问题。无人机遥感系统可以高通量地获取多个地块的高时空分辨率图像[8-10],使精准分析农业气象条件、土壤条件、作物表型等参数的空间变异性及其相互关系成为可能,为大面积农田范围内快速感知作物缺水空间变异性提供了新手段[11-12]。
在前人的研究中,无人机遥感系统已经应用在作物覆盖度[13]、株高[14]、倒伏面积[15]、生物量[16]、叶面积指数[17]、冠层温度[18]等农情信息的监测上,但对作物缺水诊断和灌溉决策的定量指标,如水分胁迫指数[19]、土壤含水率[20]、作物需水量[21-22]等参数估计的研究才刚刚起步。本文对无人机遥感在这些定量指标监测中的应用研究进展进行系统综述,在此基础上提出作物缺水诊断与灌溉决策定量指标无人机遥感的技术体系和研究重点,旨在明晰无人机遥感在灌溉技术中应用研究的技术思路和发展方向。
1 农田土壤水分无人机遥感监测技术
无人机遥感技术以其高分辨率、高灵活性、低成本等优势弥了卫星遥感的不足,逐渐成为农田土壤水分监测的重要手段。目前监测农田土壤水分的无人机遥感可以分为多光谱遥感、多光谱与热红外遥感协同以及高光谱遥感等技术。在基于无人机多光谱遥感的农田土壤水分监测方面,研究学者主要基于多光谱遥感的单一波段[30]、多个波段或多个植被指数[31-33]。如王海峰等[30]选取单个土壤含水率敏感波段建立一元回归模型来估计土壤水分,对于表层土壤(深度约1 cm)含水率的预测效果较好,相关系数均在0.92以上,均方根误差均在0.10以内。杨珺博等[32]基于无人机多光谱遥感的多个波段信息,采用逐步回归、偏最小二乘、岭回归等方法建立了土壤水分估计模型,3种回归模型对10、20 cm深度的土壤水分都有较高的监测精度,决定系数(R2)可达0.82。HASSAN-ESFAHANI等[33]基于无人机多光谱遥感获取的多种植被指数建立表面土壤水分的人工神经网络估计模型,相关系数达0.88。然而,由于土壤水分受气象条件、土壤特性、植被状况和地形等复杂因素的影响,一些研究学者在多光谱遥感提供的光谱信息基础上协同热红外遥感提供的温度信息,计算与土壤水分相关的温度植被干旱指数(TDVI)等[34],或者在地形复杂地区的土壤含水率分布研究中,协同无人机遥感获取的数字高程模型(DEM)来改善模型精度和适用性[35]。同时,为了进一步提高土壤水分估计模型在不同环境的适用性,GE等[36]基于无人机高光谱提取的二维光谱指数采用机器学习方法建立了比传统光谱指数更稳定的农田土壤水分估计模型,R2达0.90以上。
2 作物水分信息无人机遥感监测技术
灌溉的真正对象是作物而不是土壤, 而且作物的生长情况实际上能综合反映天气和土壤水分的变化情况, 故合理的灌溉应以作物的生长情况为主要依据。以作物自身生理变化为指标的诊断方法最为直接、准确,在国内外被广泛作为作物水分胁迫状况的参考值,主要包括径流[37]、茎水势[38-39]、叶水势[40-41]和气孔导度[42-43]等,作物的水分状况会在这些作物生理和生长状况的指标上直接反映出来。但这种信息主要来自单个作物,需要有合理的空间分布性或者校正样本。随着农业集约化、规模化、现代化的发展,进行统一灌溉管理的农田面积不断增加,由土壤、作物空间变异特性引起的作物水分胁迫空间变异问题将不可避免[44]。因此,对整个农田的作物水分胁迫状况及其差异性的研究非常重要,目前主要通过冠层温度、植被参数等指标进行分析[5]。
当土壤含水率充足时,环境温度的上升会造成气孔导度增大、蒸腾速率提升,最终使得冠层温度相对稳定[45]。然而,当土壤含水率不足时,作物气孔导度和蒸腾速率会下降,导致蒸腾降温效果变弱,从而造成冠层温度升高[46-47]。为了更好地应对水分胁迫,除了蒸腾速率下降、气孔开度减小和冠层温度上升等症状,作物还会表现出叶子卷曲、叶面积降低等症状[48]。同时,为了保证机体组织不被破坏,作物还会尽可能减少光的吸收以及散去多余的已吸收能量,最终表现为叶绿素浓度的降低、光合速率降低以及叶黄素循环组分含量增加等[49-51]。水分胁迫发生时,作物在冠层温度、冠层结构以及叶片色素含量上的变化为基于无人机遥感技术的作物水分胁迫分布信息空间变异性感知奠定了基础。
在卫星和航空影像技术进一步发展和成熟前,近地面移动车载测量地物吸收和反射光谱的地物光谱仪正在成为低成本高密度获取农田缺水空间变异信息的技术手段,由于光谱仪反应时间短、精度高、稳定性强,所以适宜长时间安装在移动的机器上进行田间作物长势调查。圆形喷灌机能够覆盖整个灌溉田块的特点为光谱仪的安装提供了便利。但是光谱数据在变量灌溉中的应用研究起步较晚。O′SHAUGHNESSY等[52]首次基于机载式红外测温仪观测了作物冠层温度,开启了基于作物冠层温度的动态变量灌溉分区方法研究。微型无人机遥感平台凭借成本低、易于构建、运载便利、灵活性高、作业周期短、影像数据分辨率高等优势,可以低成本地多次重复采集农业遥感数据,使其在多时相、地物的识别能力上具有独有的优势,使得作物水分胁迫信息空间变异性的迅速、细致感知成为可能[4,43,53]。基于无人机遥感技术的作物水分胁迫诊断方法根据作物对水分胁迫的不同响应,可以分为基于红外测温技术和基于冠层反射光谱两类[24,54]。
2.1 作物水分信息无人机遥感监测技术体系
无人机遥感技术在作物水分胁迫信息感知研究方面具有很大的应用潜力,已经被成功地应用到玉米[43]、棉花[55-58]、西红柿[59]、果园[38,60]、大豆[58,61]以及葡萄园[62-63]的水分胁迫分布信息的监测。完整的基于无人机遥感技术的作物水分信息感知技术体系如图1所示。该技术体系主要包括图像采集与预处理、基于温度指数的水分胁迫感知和基于植被指数的水分胁迫感知。其中,图像采集与处理主要包括无人机飞行参数设计、数据采集、地理信息匹配和图像拼接及校正处理;基于温度指数的水分胁迫感知主要包括温度校正、冠层温度提取和基于温度的胁迫指数建立;基于植被指数的水分胁迫感知主要包括反射率分布图获取和水分胁迫敏感植被指数选取或建立[43,64-65]。
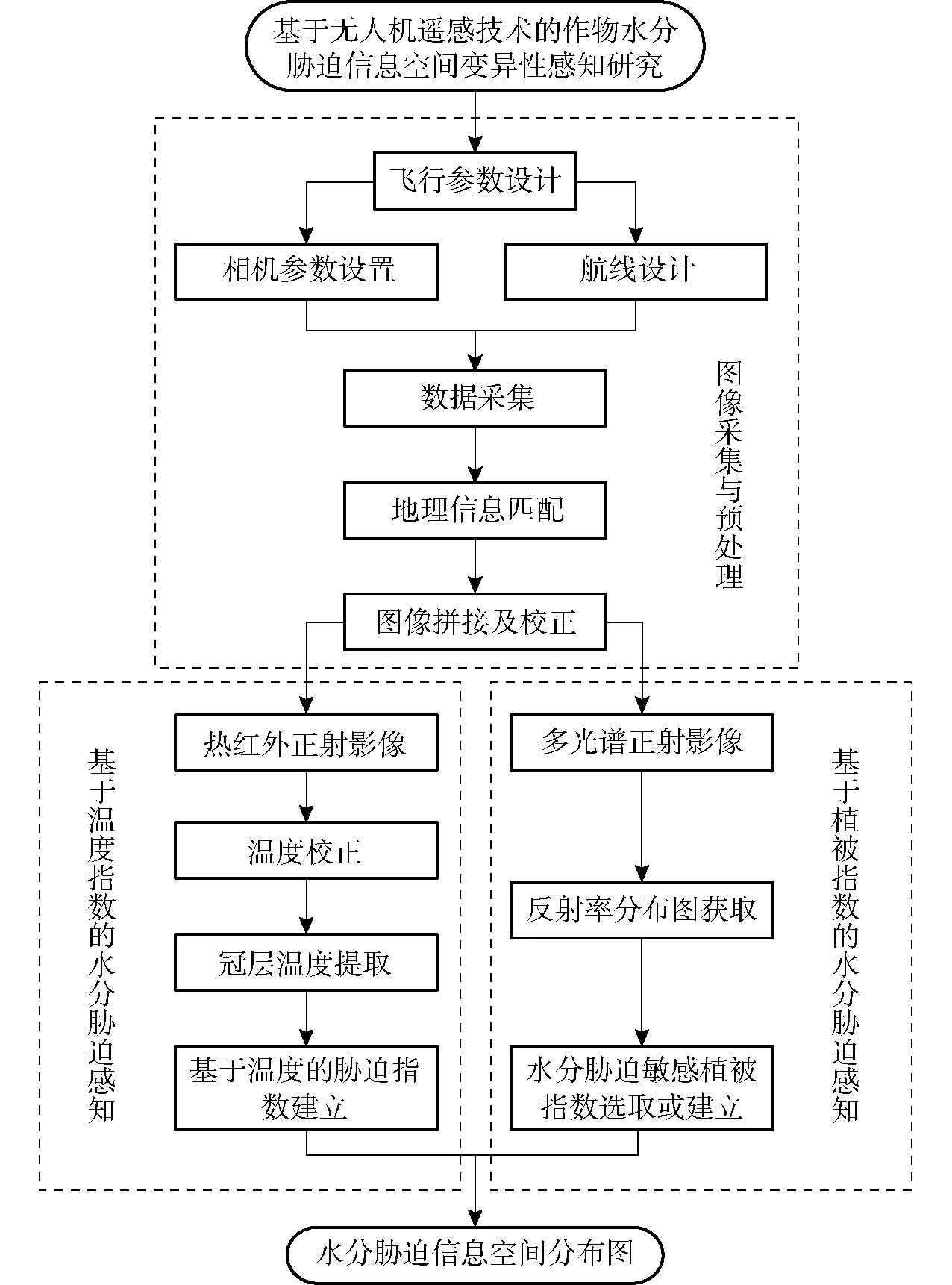
图1 基于无人机遥感技术的作物水分胁迫信息感知技术体系
2.2 基于温度指数的作物水分信息无人机遥感技术
2.2.1无人机热红外遥感图像的温度校正方法
受限于无人机平台载重能力,目前无人机热红外遥感系统集成的热红外相机多为较轻的非制冷相机,缺少制冷装置,具有获取温度不稳定等问题[64-65]。在提取作物冠层温度之前还需要对热红外图像进行校正,主要包括:非均匀性校正、缺陷像素校正、快门校正、辐射定标和温度校正[64]。在当前使用的非制冷热相机中,非均匀性校正、缺陷像素校正和快门校正由系统固件执行。而对于辐射校正来说,作物呈现在热红外相机上的温度主要受到大气温度、相对湿度、地物辐射率以及感知距离的影响[66-67]。在利用无人机热红外遥感系统采集作物冠层温度数据之前,需要将数据采集时刻的相应数据在热红外相机系统中进行设置,以减少温度感知误差。例如,在利用FLIR Vue Pro R 640采集作物热红外图像时,可以利用其配套的手机应用程序Flir UAS以蓝牙连接的方式设置数据采集时刻的大气温度、相对湿度、地物辐射率和数据采集高度等信息,从而进行辐射校正[43]。在温度校正方面,常常建立利用温枪等手持设备采集的地面观测值与无人机热红外图像温度值之间的线性模型[58,67-68]。如杨文攀等[69]利用HT-11D 便携式测温仪和热红外相机同步测量了玉米叶片、辐射定标板等地物的温度,建立了两者之间的线性模型,并用于校正热红外图像。ZHANG等[43]利用RAYTEK ST60+便携式测温仪和热红外相机同步测量了玉米冠层温度,建立了两者之间的线性模型,并用于校正热红外图像。
2.2.2基于无人机热红外遥感图像的作物冠层温度提取方法
利用小型榨油机榨取油脂,其出油率在21.1%~24.6%,其中三层模式的出油率平均最高,达到23.5%,此时毛叶山桐子油料最终含水量在8%,这与其他油料作物(如油菜)安全水分相近[12]。榨取的毛油酸价和过氧化值分别在 3.1~3.4 mg/g,2.1~2.9 mmol/kg,并且各处理各干燥层数值无显著差异(p>0.05),均低于国家对菜籽、油茶籽等毛油的品质标准规定,优于崔艳南等人[13]研究的未处理的工厂化毛叶山桐子毛油品质,这与干燥前处理与设备均有关系。
在大田作物的覆盖度未达到全覆盖之前,冠层温度的准确提取是有效监测作物水分胁迫分布信息的另一个关键问题。由于无人机热红外相机具有相对较低的分辨率(320像素×240像素~640像素×480像素)[70],在作物冠层温度提取中如何有效剔除土壤和其他地物所带来的影响仍是个挑战,其常用方法主要为阈值法和多源遥感影像融合等。阈值法只需要热红外遥感影像,其核心为采用机器学习算法(聚类、Otsu和边缘检测等)寻找作物和非作物的温度分类阈值[71-72]。如LUDOVISI等[73]分别利用Matlab和eCognition软件中的两种自动阈值分割方法提取了杨树的冠层温度。PARK等[38]利用结合Sobel和Canny算子的边缘检测算法提取了油桃和桃子的冠层温度。张智韬等[57]利用Otsu算法和基于Canny算子的边缘检测算法提取了棉花的冠层温度。然而,由于无人机热红外遥感影像在农场尺度应用时较低的空间分辨率,混合像元在基于阈值法的作物冠层温度提取中会造成较大误差。为了减少冠层温度的提取误差,国内外学者提出了基于多源遥感图像融合的冠层温度提取方法。该方法通过其他较高空间分辨率的遥感影像将土壤等的非冠层像元进行掩膜处理,然后与热红外遥感图像融合的方式提取冠层温度。如POBLETE等[63]提出了基于无人机多光谱和热红外遥感影像融合的葡萄藤冠层温度提取方法,最终建立的作物水分胁迫指数与茎水势的R2为0.77。ZHANG等[43]提出了基于无人机可见光和热红外遥感影像融合的大田玉米冠层温度提取方法,最终提取的玉米冠层温度与地面实测值的R2为0.94,均方根误差为0.7℃。然而,基于多源遥感图像融合的冠层温度提取方法的精度仍然受到作物分布信息提取精度的影响,在未来的研究中还需从高分辨率遥感图像中更为精准地提取作物分布信息。
2.2.3基于冠层温度的作物水分胁迫指数
在高效、准确提取作物冠层温度之后,选择或建立可以准确表征作物水分胁迫状况的温度指数是有效监测作物水分胁迫分布信息的另一个关键问题。在TANNER[74]首次使用冠层温度作为表征作物水分胁迫状况并量化了作物冠层温度差异和水分胁迫之间的关系之后,国内外许多研究人员将作物冠层温度应用到与作物水分胁迫状况相关的研究中。如BAI等[75]将基于无人机热红外遥感图像提取的大豆冠层温度作为水分胁迫指数,分析了不同基因型大豆对水分胁迫的抗性,结果表明冠层温度是快速鉴定大豆干旱相关性状的有效指标。然而,大气温度等外界环境同样会对冠层温度造成影响[76],仅仅利用冠层温度不能很好地表征作物水分胁迫。研究人员开始利用冠层温度与空气温度之差作为作物水分胁迫指数。如JACKSON等[77]发现当小麦没有遭受水分胁迫时,其冠层温度与空气温度的差接近或小于零,而当遭受水分胁迫时该值会大于零。
为了进一步消除外界环境对基于冠层温度的水分胁迫指数监测效果的影响,IDSO等[78]提出作物水分胁迫指数(Crop water stress index,CWSI)经验法,JACKSON等[79]提出CWSI理论法,并成为目前应用最为广泛的基于温度的作物水分胁迫指数。在实际应用中,CWSI理论模型需要测量作物冠层温度、空气温湿度、太阳净辐射、风速和株高等参数且计算过程复杂,但受环境变化的影响较小;与理论模型相比,CWSI经验模型只需测量作物冠层温度、空气温湿度且计算简单,但易受环境影响且需要针对不同的气候条件和种植模型建立对应的上、下基线[80]。国内外许多研究人员成功地将CWSI经验模型和理论模型应用到作物水分胁迫状况监测。如IRMAK等[81]以地中海半干旱条件下玉米为研究对象基于经验法建立的CWSI模型,实现了对夏玉米水分胁迫状况的监测和量化,并建立了产量与季节性平均CWSI的关系模型。TAGHVAEIAN等[82]以美国科罗拉多州北部的向日葵为研究对象,建立了CWSI经验模型,并分析了CWSI与叶面积指数、叶水势等的相关性。孙道宗等[83]通过观测冬季和春季塑料大棚中不同灌溉条件下茶树的冠层温度、空气温湿度、太阳净辐射、风速和株高等参数,分别建立了CWSI经验模型和理论模型,得出了反映茶树水分状况的关系曲线,并研究分析了两者反映茶树水分胁迫的差异性。张立元等[84]以内蒙古自治区鄂尔多斯市达拉特旗大田玉米为研究对象,研究分析了不同CWSI经验模型无水分胁迫基线和无蒸腾作用基线建立方法对该地区气候条件和种植模式的适用性,研究结果表明,基于田间空气温湿度数据建立的CWSI经验模型较为合理,可以有效监测大田玉米水分胁迫状况。然而,前人研究表明CWSI经验模型的无水分胁迫基线具有较大的变异性[37],如在不同地点建立的玉米CWSI经验模型无水分胁迫基线的斜率范围为-1.10~-3.77℃/kPa,相应的截距范围为0.42~3.11℃[4]。造成CWSI经验模型无水分胁迫基线变化的原因主要可以归结为:不同地点气候条件的不同[85-86]、冠层温度及空气温湿度采集位置的不同[87]、冠层温度测量设备及方式的不同[37]、不同作物品种之间的差异[88]。
同时,为了降低基于冠层温度的水分胁迫指数的建立难度,还有一些研究人员利用作物冠层温度在热红外遥感图像的分布情况建立了可以表征作物水分胁迫的指标,如冠层温度标准差(CTSD)和冠层温度变异系数(CTCV)等。HAN等[89]利用EM算法(Expectation-maximization algorithm)模拟玉米冠层温度的高斯分布规律,计算并分析CTSD 对作物水分胁迫的响应。张智韬等[57]基于无人机热红外图像采用Canny边缘检测算法将热红外图像中的土壤背景有效剔除,计算并分析了棉花冠层温度特征数CTSD和CTCV与棉花叶片气孔导度、蒸腾速率、CWSI、土壤体积含水率的相关关系。提高CWSI模型在不同地区、针对不同气候条件和作物品种的通用性,以及简化基于冠层温度的作物水分胁迫指数的建立方法将是未来研究的重点内容。
2.3 基于植被指数的作物水分信息无人机遥感技术
尽管利用红外测温技术获取冠层温度监测作物水分胁迫状况十分有效,并且在一些研究中已经建立了相关的监测方法。但是基于多光谱波段建立相关作物水分胁迫监测方法也具有作物生理特性支撑[90],同样可以作为有效的作物水分胁迫分布信息空间变异性感知手段。目前,根据水分胁迫作物不同生理变化的敏感性,可以将对水分胁迫敏感的窄波段多光谱植被指数分为3类:叶黄素相关指数、叶绿素相关指数和冠层结构相关指数。
2.3.1叶黄素指数
由GAMON等[91]提出的叶黄素指数(Photochemical reflectance index,PRI)在一些研究中已经成功地作为作物水分胁迫指标进行了测试[92-94]。然而,PRI指数受冠层结构、色素含量和时间尺度的影响较大[24,94],且其在地面遥感和无人机遥感尺度上的水分胁迫监测能力尚不稳定[95]。如MAGNEY等[51]通过地面遥感技术在旱地春小麦两个生长季中对PRI指数的水分胁迫监测性能进行了评估,结果发现PRI需要校正因季节变化带来的叶片色素含量和叶面积指数变化的影响,同时可能也需要在更为精细的时间频率下进行测量。SUREZ等[96]在航空尺度上评估了PRI指数对橄榄园水分胁迫信息的监测效果,结果发现其受冠层结构和背景地物的影响较大。为了减少冠层结构和叶片色素含量对PRI指数水分胁迫监测效果的影响,一些研究人员开始构建PRI指数的变体。如,ZARCO-TEJADA等[94]提出了一个基于PRI的改进指数(PRInorm)来跟踪水分胁迫的日变化趋势,该指数通过结合冠层结构指数(重组差异植被指数,Re-normalized difference vegetation index,RDVI)和叶绿素指数(红边比值植被指数,r700/r670)的方式来减小冠层结构和叶片色素含量对PRI指数水分胁迫监测效果的影响,结果表明PRInorm与常用水分胁迫指标CWSI、叶水势和气孔导度具有较高的相关性且大于PRI指数。然而对于PRI指数的变体,仍需要在大量田间实验研究中进一步验证其水分胁迫监测效果的稳定性。
2.3.2叶绿素和冠层结构相关指数
与叶黄素相关指数相比,叶绿素和冠层结构相关指数在窄波段多光谱植被指数当中更为常见,已被广泛应用到多种作物生长信息监测中,如叶绿素含量反演[97]、叶面积指数反演[17]、生物量反演[98]等。当持续水分胁迫发生时,叶片卷曲或下垂[99],叶绿素含量下降[100],诱导的结构或颜色变化一直被认为是作物水分胁迫的视觉指标[42,101]。在遥感领域,由叶片结构或叶绿素含量变化引起的特定波段反射率的减少或增加,为利用无人机窄带多光谱植被指数监测作物水分状况奠定了基础。如,BALUJA等[102]使用基于无人机的多光谱系统评估葡萄庄园水分状况的空间变异性,结果显示归一化植被指数(NDVI)和转化叶绿素吸收反射率(TCARI)与优化土壤调节植被指数(OSAVI)的比值与气孔导度(R2=0.84,p<0.05)、茎水势(R2=0.68,p<0.05)高度相关,NDVI与TCARI/OSAVI可认为是良好的水分胁迫指标。ESPINOZA等[62]研究无人机多光谱图像在评估商业葡萄园地下灌溉配置变化中的适用性时发现,绿色标准化差异植被指数(GNDVI)和气孔导度之间存在显著相关性,Pearson相关系数为0.65。虽然,基于无人机窄波段多光谱建立的植被指数已经成功应用于监测多种作物的水分胁迫状况,但在建立植被指数与作物水分胁迫相关的生理特性指标(如气孔导度和茎水势)的关系时,研究人员发现其相关性具有较大的波动性。如,以茎水势为水分胁迫参考时,其R2在0.01~0.68之间波动[39]。因此,还需要针对植被指数水分胁迫监测效果的波动性进行进一步研究。
3 作物需水量无人机遥感估算
作物水分胁迫是由供水不足导致的,表现为土壤含水率减少时植物对水分缺乏的生理反应。作物对水分胁迫的响应程度取决于环境条件和作物需耗水量,因为灌溉必须补充因作物蒸散发而损失的土壤水分[24]。1998年联合国粮农组织(FAO)提出了通过参考作物蒸散量(ET0),使用作物系数法[103]估算作物蒸散量ET,并给出不同地区不同作物的作物系数推荐值,仅需要气象资料就可以估算作物ET。作物系数法有较强的普适性,在世界范围内被广泛地应用。然而,由于作物生长状况、气象条件和水分胁迫等因素的综合影响,田间作物时空尺度上用水存在差异性,使用推荐的作物系数估算蒸散量误差较大,必须进行校正才能使用[103]。很多方法采用了能量平衡方程以估计实际蒸腾量ETc,而多光谱植被指数的方法用于估算作物蒸散量不需要过多的数据,因此比能量平衡方程式更简单。目前的无人机多光谱监测系统比热红外系统使用起来更简便,因此目前无人机遥感在作物需水量估算方面的应用主要还是集中在基于多光谱植被指数的方法。基于无人机遥感和能量平衡方法的应用研究还没有相关成果报道,仅在区分冠层温度和土壤温度方面刚开始有人研究,因此本文主要综述基于作物系数法的作物需水量无人机遥感估算研究进展。
3.1 作物系数Kc无人机遥感估计
目前,在作物需水量估算和土壤-植物连续体水量平衡监测中,FAO-56作物系数法可分为单作物系数法和双作物系数法。单作物系数法是将植物蒸腾和土壤蒸发整合到作物系数Kc中,双作物系数法是使用两个系数来分离植物蒸腾(Kcb)和土壤蒸发(Ke)对蒸散发的影响[103]。与单作物系数法相比,双作物系数法由于可区分作物蒸腾和土壤蒸发,能够更加精确地计算农田ET。在估计作物系数Kc或估计基础作物系数Kcb方面,地面光谱技术估算基础作物系数Kcb精度较好,主要因为Kcb表征作物蒸腾量,与植被生长状态相关,但比较费时费力,难以应用在区域或大田尺度上[103]。卫星遥感技术可以较好地估算区域尺度的作物系数,但由于该技术拍摄周期长且影像分辨率低,难以满足大田作物日蒸散量的估算要求[103]。无人机遥感技术可以较好地估算特定条件下的日作物系数,满足大田玉米日作物系数估算需求[11],但现有研究中,整个生育期作物系数估算方法研究较少,模型精度有待进一步提高。张瑜等[21]研究了整个玉米生育期不同水分胁迫条件下,无人机多光谱植被指数、叶面积指数、表层土壤含水率和作物系数的关系(R2=0.60,RMSE为0.21),表明作物系数与植被指数(Simple ratio index,SR)、叶面积指数和表层土壤含水率的相关程度与水分胁迫程度相关。韩文霆等[22]建立了大田玉米不同生育期不同水分胁迫条件下6种无人机多光谱植被指数与作物系数关系模型,结果表明在快速生长期充分灌溉条件和生长后期水分胁迫条件下,植被指数SR与作物系数的相关性最好(R2分别为0.94和0.85)。
3.2 作物水分胁迫系数Ks无人机遥感估计
当土壤含水率降低到阈值时,作物发生水分胁迫现象,在作物系数法中需要利用水分胁迫系数Ks修正土壤水分胁迫对作物蒸散发的影响。因此精确计算Ks对于估计水分胁迫条件下的作物蒸散发很重要。目前估算作物水分胁迫系数Ks分为直接法和间接法。间接法需要先获取作物的潜在蒸腾量(ETp)和实际蒸腾量(ETc),然后通过Ks=1-ETc/ETp计算得到Ks。基于传统的FAO-56方法直接计算Ks是目前使用最广泛的方法,在FAO-56中需要通过水量平衡方程来得到每天的土壤根系层的消耗水量,这就需要准确地监测土壤根系层的水分变化。基于TDR等仪器的单点土壤水分测量虽然具有很高的精度,但是这些监测方法往往需要布设大量昂贵的传感器。在此基础上有很多研究提出了基于温度数据来计算作物水分胁迫系数Ks。温度数据可以通过便携式温枪或是红外测温仪(Infrared thermometer,IRT)测量[24]。如OLIVERA-GUERRA等[104]利用实测的地表温度和光谱数据反演植被和土壤温度来直接估算FAO-56双作物系数法中的Ks。JACKSON等[79]和BAUSCH等[105]分别提出了基于冠层温度的水分胁迫指数CWSI、Tcratio与Ks的关系式。KULLBERG等[106]基于这两种方法结合FAO-56双作物系数法计算了当地作物的作物蒸散发,R2分别为0.86和0.83。即使基于冠层温度计算Ks的方法很大程度地减少了监测难度,这种方法和基于土壤含水率计算Ks一样,都很难代表整个研究区域的水分胁迫状况,尤其是在土壤作物空间异质性大的情况下。遥感因其非破坏性和空间化的监测方式,近年来在作物胁迫监测领域已经显示出了独特的优势。由于基于卫星光学遥感数据估算土壤和根区水分(或根区耗水)存在一定的困难,因此利用卫星遥感数据估算水分胁迫系数Ks的研究较少。而无人机作为一个新兴的遥感平台,具有成本低、易于构建、运载便利、灵活性高、作业周期短、影像数据分辨率高等优势,可以低成本地多次重复采集农业遥感数据的优点。ZHANG 等[107]利用热红外无人机获取的CWSI得到大田作物的Ks空间分布,并且通过此结果优化得到的土壤总有效水量和水量平衡方程来反演玉米和葵花地土壤根系层的消耗水量,相对于传统的水量平衡估算精度(平均绝对误差和均方根误差)有了很大的提高(玉米为40%和44%,葵花为22%)。
4 无人机遥感在变量灌溉中的应用
4.1 变量灌溉管理分区
适时、准确地获取和感知农田作物对水分胁迫的响应是变量灌溉处方图生成的核心技术[108]。传统的精准灌溉技术中变量灌溉处方图生成模型的研究主要基于土壤特性,如电导率和田间持水量等[109]。根据土壤电导率分布图以在不同的区进行独立水量平衡分析的方式生成田间持水量管理区,但使用的降雨数据和蒸散发数据是相同的。同时,由于作物生长状况是土壤水分状况的直接反映,且随着空间信息技术和作物生长信息监测仪器、收获机械产量监测系统的快速发展,出现了基于作物特征如作物生物量、产量和平均叶水势等[110-112]的变量灌溉管理分区研究。在卫星和航空影像技术进一步发展和成熟前,近地面移动车载测量地物吸收和反射光谱的地物光谱仪正在成为低成本高密度获取农田缺水空间变异信息的技术手段。O′SHAUGHNESSY等[52]首次基于喷灌机机载红外测温仪观测了作物冠层温度,开启了基于作物冠层温度的动态变量灌溉分区方法研究。利用卫星遥感技术可以快速获取大面积的土壤水分和作物蒸散发信息,国内外研究均取得了一定进展,但卫星遥感由于存在时空分辨率低等问题,在指导变量灌溉的实际应用中受到很大限制。
4.2 变量灌溉决策技术
决策支持系统是变量灌溉的核心组成部分,其管理方法是指用于指导特定区域的灌溉时间和灌水量的灌溉制度。NAVARRO-HELLN等[113]开发了一种自动智能灌溉决策支持系统(Smart irrigation decision support system,SIDSS),用于管理农业灌溉。该系统以土壤测量值和气候变量为数据基础,采用闭环控制方案,以偏最小二乘回归(PLSR)和自适应神经模糊推理系统(ANFIS)两种机器学习技术为SIDSS推理引擎,估算人工林的每周灌溉需求,该方法已在西班牙东南部的3个柑桔商业种植园中得到验证。NAIN等[114]使用灌溉决策系统来产生适合丘陵地区灌溉和施肥的决策输出。MILLER等[115]开发了一种基于地理空间信息的决策支持系统,该系统使用自然资源保护服务网格土壤调查地理数据库评估控制方案和潜在节水情况,根据土壤水平衡方法,开发了变量灌溉处方图。AgroClimate是用于提高灌溉效率的决策工具(http:∥mz.agroclimate.org/),其灌溉决策基于每日的作物蒸散量[116]。大多数灌溉决策系统是针对特定的农作物或农田而设计的,很难将其应用于其他地区或其他作物。鉴于此,YANG等[117]开发了用于灵活灌溉计划的决策支持系统,用户可以通过用户界面修改其输入参数,以提高系统的普适性。
决策支持系统在灌溉系统中的应用取决于可靠的决策方法和决策信息数据源。天气预报信息是估算作物需水量的一种方法[118],但是该方法忽略了农作物特性和空间变异性。一些研究使用传感器和全球定位系统(Global positioning system,GPS)来收集特定土壤和植物信息。SUI 等[119]建立了无线传感器网络以监测土壤含水率并收集气象数据。O′SHAUGHNESSY等[52]使用红外温度传感器节点,将其安装在中心支轴式喷灌机的桁架上测量区域中作物冠层温度。MORARI等[120]使用时域传感器测量土壤水分含量。由于这些传感器是固定的,因此灌溉决策精度取决于农田区域或喷灌机桁架上的传感器数量,并且这些传感器的大规模部署对于移动式灌溉系统来说并不经济。同时,安装在农田的传感器对农田土壤生态系统有害。
4.3 无人机遥感在变量灌溉决策中的应用
遥感技术弥补了固定式传感器的缺陷,具有实时性好和覆盖面积广的优点。目前,无人机载热红外相机多为较轻的非制冷相机,缺少制冷装置,具有获取温度不稳定等问题,同时易受气温和人类活动的影响[64]。与无人机热红外遥感系统相比,无人机多光谱遥感系统在信息获取稳定性和拼接质量方面具有更好的技术成熟度。同时,作物在冠层结构以及叶片色素含量上对水分胁迫的响应引起的特定波段反射率的变化,也为基于无人机多光谱植被指数的作物水分胁迫感知奠定了基础。因此,开始有研究人员使用无人机多光谱图像计算得到的植被指数(Vegetation index,VI)反演水分胁迫指数(CWSI)。如ZHANG等[4]使用高分辨率的无人机多光谱图像来绘制玉米水分胁迫状况图。
决策支持系统已被一些农场使用,但依然存在一些问题。首先,决策支持系统的输出是控制系统的输入信息,在一些控制系统中,实际灌溉量不能完全等同于农作物的需水量,决策支持系统应该是与控制系统结合。控制系统的常用方法包括区域控制和速度控制[121]。速度控制可改变中心枢轴的移动速度以实现所需的灌溉深度,而占空比控制改变了单个喷头或喷头组的开关时间达到所需的灌溉深度。其次,针对不同地区或不同农作物建立的CWSI/Kc反演模型(VI-Kc/VI-CWSI)差异较大。不同的农作物具有不同的最优VI-Kc/VI-CWSI模型[122-123]。不同地区同一作物的VI-Kc/VI-CWSI也不同[124]。基于固定模型的决策支持系统适用范围较狭窄。最后,灌溉量是多因素决策的结果。实际上,精确测量灌溉需求是复杂的,其实施需要大量的资金和时间。
模糊推理系统的概念已被广泛地用于决策支持。模糊系统具有规则简单、适用范围广等特点[125],可以分析不准确信息,从复杂的农田信息中获得需要的信息指导灌溉[126]。作物生长状态与灌溉量之间的相互关系并不总是精准的。因此,模糊推理模型对于灌溉决策是一个行之有效的办法。SHI等[127]利用无人机多光谱图像建立了中心支轴式变量灌溉决策支持系统。该系统可以处理无人拍摄的多光谱图像并计算植被指数,并通过植被指数和已有的模型计算得到作物水分胁迫指数(CWSI)和作物系数(Kc)。将作物水分胁迫系数作为作物当前的水分状态,单作物系数法得到的ETc和未来7 d的降雨作为预测水分耗损量和补充量,三者同为模糊输入,通过模糊推理系统得到每个管理区域的灌溉参考量。决策系统将生成电磁阀占空比控制图,指导变量灌溉控制系统实现变量灌溉。
4.4 无人机遥感在变量灌溉中应用的技术体系
根据已有研究基础,总结出无人机遥感在变量灌溉中应用的技术体系,如图2所示。首先根据作物缺水诊断和变量灌溉对无人机遥感图像的技术要求优化无人机遥感系统作业参数,以保证获取农田高质量的可见光、多光谱和热红外遥感图像,地面同时进行土壤水分、冠层温度、作物形态参数和绿度参数等的监测。其次利用无人机可见光图像和地面形态参数监测结果筛选与作物缺水相关性较强的形态参数指标并进行反演,建立基于作物形态参数的缺水信息无人机遥感诊断模型。然后基于无人机多光谱遥感图像和地面作物绿度参数监测结果进行多种植被指数和作物系数Kcb的计算,建立基于作物绿度参数的缺水信息无人机遥感诊断模型。然后基于无人机热红外遥感图像和地面温度参数监测结果计算作物缺水指数CWSI,建立基于温度参数的缺水信息无人机遥感诊断模型。然后采用多变量分析的数学方法,对上述3种类型参数和指标进行综合分析,建立多指标综合分析的作物缺水信息无人机遥感诊断模型,并绘制农田作物缺水量空间分布图。最后依据灌水量决策系统及变量灌溉系统控制参数,研究变量灌溉分区方法,建立基于GIS的变量灌溉处方图生成模型,指导精准灌溉。

图2 无人机遥感在变量灌溉技术中应用的技术体系
5 结论
(1)无人机遥感在灌溉技术中的应用是近几年灌溉领域的研究热点之一。无人机遥感系统可以高通量地获取多个地块的高时空分辨率图像,使精准分析农业气象条件、土壤条件、作物表型等参数的空间变异性及其相互关系成为可能,为大面积农田范围内快速感知作物缺水空间变异性提供了新手段,在变量灌溉等技术应用中具有明显的优势和广阔的前景。
(2)无人机遥感系统已经应用在作物覆盖度、株高、倒伏面积、生物量、叶面积指数、冠层温度等农情信息的监测,但在用于作物缺水诊断和灌溉决策的定量指标监测方面的研究刚刚起步,目前主要集中在作物水分胁迫指数(CWSI)、作物系数、冠层结构相关指数、土壤含水率、叶黄素指数(PRI)等参数估计的研究,有些指标已经成功应用于监测多种作物的水分胁迫状况,但对于大多数作物和指标来说,模型的普适性还有待进一步研究。
(3)作物自身水分信息无人机遥感监测技术主要包括基于温度指数的水分胁迫感知和基于植被指数的水分胁迫感知。基于温度指数的水分胁迫感知主要包括温度校正、冠层温度提取和基于温度的胁迫指数建立;基于植被指数的水分胁迫感知主要包括反射率分布图获取和水分胁迫敏感植被指数选取或建立。
(4)建立了无人机遥感在变量灌溉技术中应用的技术体系,主要通过无人机获取大面积农田作物超高时空分辨率的可见光、近红外、热红外等遥感图像,提取和反演土壤参数、作物形态参数、绿度参数以及冠层温度,结合地面数据同化技术,建立基于作物形态参数、绿度参数及温度参数的作物缺水诊断模型,依据作物缺水空间分布和灌溉决策方法,生成变量灌溉处方图,实现精准灌溉。
(5)为满足不同尺度的高效率监测和实现农业用水精准动态管理的需求,今后无人机遥感需要结合卫星遥感和地面监测系统。天空地一体化农业水信息监测网络优化布局方法与智能组网技术、多源信息时空融合与同化技术、农业灌溉大数据等将是未来重点研究内容。
猜你喜欢
中国农业信息(2022年1期)2022-05-25 13:31:46
环球时报(2022-05-23)2022-05-23 11:28:37
农业机械学报(2021年11期)2021-12-07 05:36:44
金桥(2021年4期)2021-05-21 08:19:20
大气科学(2021年1期)2021-04-16 07:34:18
电子制作(2019年7期)2019-04-25 13:17:14
水土保持研究(2018年5期)2018-10-12 05:29:52
中国农业信息(2018年2期)2018-07-28 08:02:10
农业环境科学学报(2017年2期)2017-03-20 14:57:37
光学精密工程(2016年3期)2016-11-07 09:03:43
