
基于分布式光纤的埋地自来水管多点泄漏定位方法分析
2020-03-05 03:12:54张智望谷小红吴琳琳
应用光学 2020年1期
张智望,王 强,谷小红,赵 亚,吴琳琳,朱 凯
(1.中国计量大学 机电工程学院,浙江 杭州 310018;2.中国计量大学 质量与安全工程学院,浙江 杭州 310018)
引言
近年来,城市管网的泄漏问题持续影响城市发展。然而,在实际的监测过程之中,传统的监测方式例如水平衡调查法、负压波法和探地雷达探测法[1]等不适合埋地管道的泄漏定位。随着光纤测温技术的研究深入,分布式光纤测温系统被广泛运用在监测城市埋地自来水管道的泄漏。张纪承[2]等将拉曼光谱仪用于检测环境温度变化;B.Apperl[3]等将分布式光纤测温系统用于污水压力管道的泄漏定位和检测;Nick van de Giesen[4]等采用了双端校准的分布式光纤拉曼测温传感器,使得实际温度测量更为精确;Tsutomu Yamate[5]等在石油勘探以及油气田井下检测缺陷中使用分布式拉曼测温传感器,并且能够较为准确地评估油气井的完整性;张青[6]等提出基于拉曼散射的深孔测温方法对地热资源进行勘测;何巍巍[7]等改进分布式光纤测温系统,搭建了分布式光纤地面解调样机用于油井监测;赵亚[8]等采用了选择性平均阈值的算法,针对PVC(polyvinyl chloride)自来水管道单泄漏点进行定位;Thomas Reinsch[9]等采用选取不同涂层的测温光纤对比分析了温度在传输过程中的衰减。
分布式光纤拉曼测温系统在实际使用中,由于光纤后向散射中产生的拉曼散射光信号特别微弱,极容易与环境外界因素所产生的扰动信号产生虚警或漏警,影响系统的精确性。在测温的过程中,为提高温度信号的可靠性,王垚[10]等提出对光信号的位置利用色散补偿算法进行补正,有效弥补了光信号在传播速度上的不同而产生的测量误差,提高了分布式光纤拉曼散射测温系统测量的准确性;韦坚[11]等针对环境扰动的问题提出了用卡尔曼滤波的方法,将测温曲线的数值和曲线之间的方差从0.251 减少至0.122。由于不同材质的埋地管道在发生多点泄漏时所产生的温度信号较小,因此,为能准确分辨实际泄漏所产生的温差信号和由于环境干扰产生的扰动温差信号,需对采集的拉曼散射光信号进行处理,然后再对光信号得到的温度信号进行泄漏点定位。故提出将基于拉曼散射测温原理的分布式光纤测温系统应用于UPVC(unplasticized polyvinyl chloride)和铸铁自来水管道的泄漏定位问题。
本文搭建了基于分布式光纤测温原理的自来水管道和多个泄漏点检测实验平台,进行了UPVC管以及铸铁管的泄漏检测和模拟定位实验,利用分布式光纤对自来水管道进行泄漏检测和定位模拟实验。通过对测量光纤长200 m 时拉曼散射原始光信号进行平滑去噪处理,用去噪后的反斯托克斯(anti-Stokes)光信号所得温度信号的归一化信号作为相关系数法的特征向量,对UPVC 管和铸铁管有无泄漏进行了分类识别,然后采用了一种基于分布式光纤拉曼测温的选择性平均阈值算法,对温度信号进行阈值分析,最终确定出两个泄漏点的位置。
1 分布式光纤测温原理
光纤中注入一定能量的激光脉冲,将在距离注入点长度L处发生拉曼散射,斯托克斯(Stokes)光子数和anti-Stokes 光子数分别为[12]

式中:Ks、Ka为与光纤散射截面有关的系数;Va、Vs为 对应的光子频率;S为光纤的背向散射因子;Ne为 光纤入射端的激光光子数; α0、αs、αas分别为入射光、Stokes 光和anti-Stokes 光的损耗系数;Rs(T)、Ras(T)为低能级粒子数和高能级粒子数分布有关函数。其中Rs(T) 、Ras(T)可表示为[13]

式中:h表示普朗克常数; Δv为光纤中分子振动频率;k为玻尔兹曼常量;T为距离L处的热力学温度。
当T=T0时(T0为已知起始温度),(3)式可表示为

由(1)式和(2)式的比值以及(5)式和(6)式的比值可得温度值T[14]:
光时域反射(OTDR)测距[15]通过在光纤输出端发射激光产生的背向散射光信号,对比计算得到从激光发射到接收以及背向散射所用时间实现分布式光纤沿线定位的功能。
目前自来水管的泄漏检测方法,大多仅适用于单一管道泄漏检测以及短距离管道单泄漏点检测,针对不同材质的自来水管进行长距离多泄漏点实时监测的方法相对较少。而分布式光纤拉曼散射测温系统在管道检测方面有着测量精度高、报警速度快和系统成本低等优点,因此可将基于拉曼散射和OTDR 技术相结合的分布式光纤测温系统应用于UPVC 埋地自来水管道以及铸铁自来水管道的泄漏检测。
2 基于分布式光纤温度泄漏点定位方法
2.1 原始anti-Stokes 光信号预处理
由于光纤分布在地下时受到许多环境因素的干扰,产生的噪声信号会对泄漏点的检测产生虚警和误警的情况,因此需要在对信号进行分析判断之前先进行原始anti-Stokes 信号预处理。
在埋地管道实验环境中,针对UPVC 管以及铸铁自来水埋地管道进行泄漏检测和定位实验,利用分布式光纤测温系统对温度进行监测和信号采集,对其中963 个温度点进行采样,取其中1 组典型的泄漏信号,对这组泄漏信号进行中值滤波处理,由图1(a)、图1(b)所示。
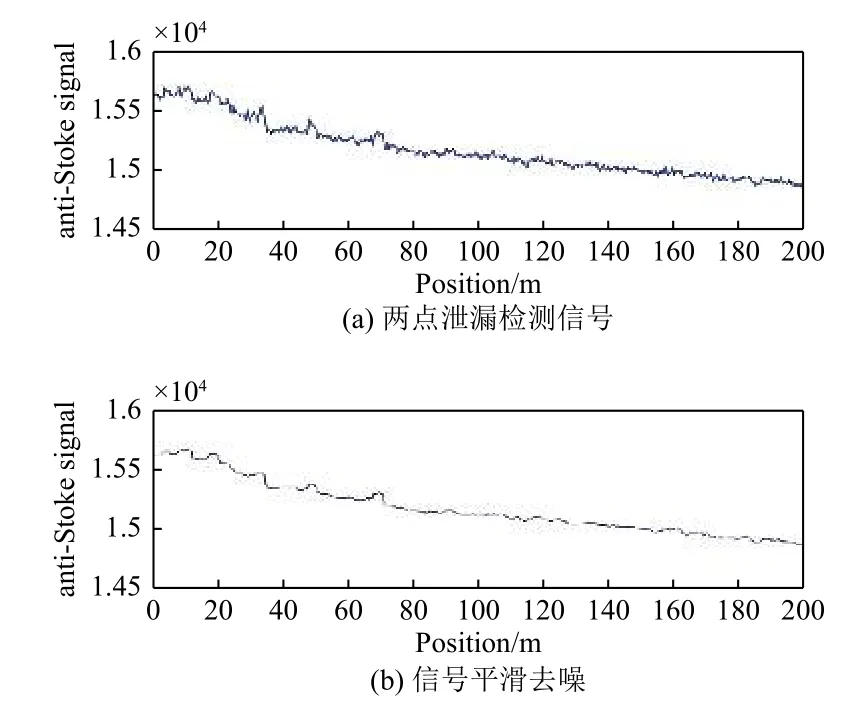
图1 埋地水管泄漏检测光信号Fig.1 Leakage detection optical signal of underground water pipes
由图1 所知,无法直接对去噪后的anti-Stokes信号进行泄漏点的定位,因此需对去噪后光信号所得的温度信号进行处理,再进行泄漏点的判断和定位。
2.2 皮尔逊积差相关系数分类
埋地自来水管道发生泄漏时,自来水管道泄漏的液体会引起周围材料介质的温度发生变化,利用分布式光纤测温系统检测得到的信号与未泄漏时的信号有所不同。
为了能够准确判断埋地管道是否出现了泄漏的情况,需要先对预处理后的信号先进行分类处理。皮尔逊积差相关系数是基于矩阵基本原理的一种典型判断两个矩阵相似性的方法,皮尔逊积差相关系数用公式表示为

式中:E是数学期望;cov是协方差; σX,σY分别为X和Y的样本标准差; µX,µY为X,Y的样本平均值。
2.3 选择性平均阈值法
提高系统定位精度和降低系统虚警率,是利用分布式光纤测温系统进行自来水管道泄漏检测时急需解决的问题,而有效解决办法就是阈值的准确设定。
选择性平均阈值法,是一种通过模板匹配的方式剔除部分受外界因素影响的温度曲线进行平均的算法[16]。具体过程为:首先将检测信号按照采集时间进行划分,依次分为初期信号、中期信号和后期信号,并对初期检测信号进行累加平均处理,将所得平均信号作为初级模板。然后计算中期信号与初级模板的相似系数,判断初级模板是否合格。相似系数用 γ来表示,则:

式中δ 为差值系数,计算公式为
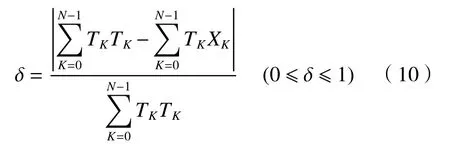
式中:TK为模板信号;XK为待检测信号,通过相关差值法估计模板信号的自相关函数和模板与待检测信号的互相关函数之间的相似度来实现模板匹配。经相关差值法验证后,初级模板合格,进行下一步,否则,舍弃初级信号,重新进行信号的划分和累加平均处理。最后,计算后期信号与初级模板之间的相似系数,识别并剔除差值系数较大的信号数组,将保留下来的信号进行累加平均,得到最终阈值。
3 实验数据分析
3.1 实验装置
在现场模拟环境下利用基于拉曼散射和光时域反射技术相结合的分布式光纤测温系统进行自来水管泄漏检测和定位实验,选用长200 m,纤芯规格为62.5 μm/125 μm,测温范围-40 ℃~120 ℃的单芯多模铠装光纤;输出功率为10 000 μW,中心波长为1 550.12 nm,带宽2 nm 的带尾纤MOCVD InGaAsP 高功率脉冲半导体激光器;定制长25 m 的UPVC 埋地管道,UPVC 管道通过法兰连接长11 m 的铸铁管道,铸铁管道通过法兰连接长12 m 的不锈钢管道;分别在UPVC 管道的16 m,20 m 以及24 m 处设置1 号,2 号和3 号模拟泄漏窖井;在铸铁管道的6 m 以及4 m 处设置4 号和5 号模拟泄漏窖井;将长200 m 的单芯多模铠装光纤埋于管道附近,在管道设置窖井的位置进行光纤缠绕铺放,利用分布式光纤拉曼测温系统可以对漏损情况进行探测,如图2(c)所示。在现场实验时打开2 号窖井和5 号窖井作为模拟埋地管道泄漏的样本。本文构造了基于分布式光纤拉曼测温的不同材质自来水管多点泄漏模拟检测系统,现场模拟埋地管道泄漏系统由分布式光纤测温系统、储水箱、UPVC 埋地自来水管道、铸铁埋地自来水管道以及水循环系统组成,如图2 所示。
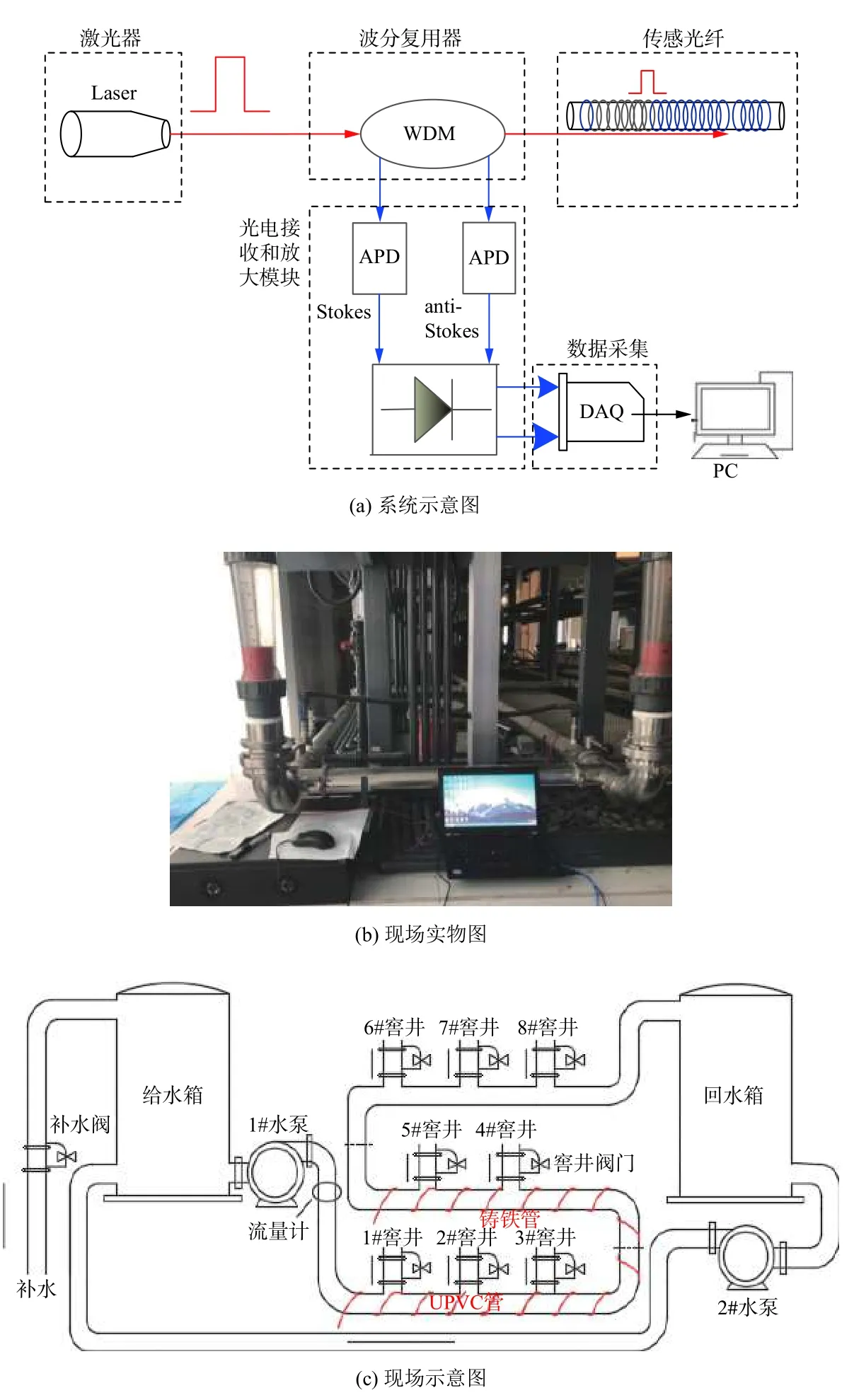
图2 模拟两种材质埋地管道检测系统Fig.2 Simulation of two kinds of underground pipelines detection system
3.2 检测温度信号的皮尔逊积差相关系数分类
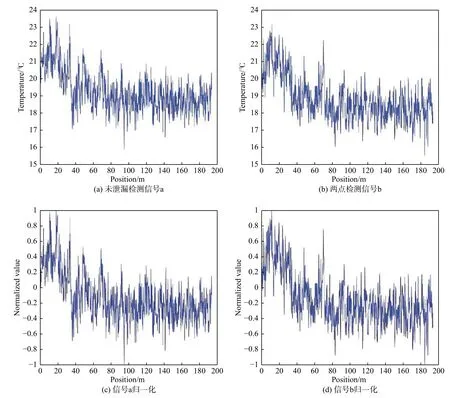
图3 埋地水管泄漏检测信号Fig.3 Leakage detection signal of underground water pipes
在UPVC 自来水埋地管道和铸铁管道的泄漏监测实验中,利用分布式光纤测温系统对UPVC自来水管道以及铸铁管进行泄漏检测和定位实验。取两组典型检测温度信号如图3(a)、3(b)所示。为方便后续信号的处理,对其进行归一化,结果分别如图3(c)、3(d)所示。由图3 可知,在埋地管道发生泄漏的情况下,由于温差变化较小以及环境土壤等因素的干扰,从去噪后的光信号得到的原始温度图中较难判别埋地水管是否发生了泄漏。因此,需对信号进行处理,利用皮尔逊积差相关系数,对检测信号a、b 进行分类。
取自来水管在已知有泄漏和无泄漏情况下所得检测数据20 组作为测试样本(其中定义样本1~10 为未泄漏温度信号样本,样本11~20 为两点泄漏样本),再取一组未泄漏的样本作为参考样本,用测试样本与参考样本分别计算 ρx,y,所得结果如表1 所示,从表1 中可以看出,样本1~10 与参考的未泄漏样本之间 ρx,y介于0.84 到0.9 之间,样本11~20 与参考的未泄漏样本之间 ρx,y介于0.68~0.74 之间,从而确定样本1~10 与未泄漏的参考样本有强相关性,实现了埋地自来水管道的泄漏情况识别。
3.3 阈值设定与泄漏定位
相关系数法定性判别埋地水管泄漏与否之后,需精确地确定泄漏点的具体位置。泄漏定位算法是基于埋地管道在地下发生泄漏时渗出的液体引起周围土壤以及介质变化的原理,根据未泄漏信号确定参考阈值信号,对比阈值信号和两点泄漏信号,寻找温度突变点,即为埋地管道泄漏点的具体位置。
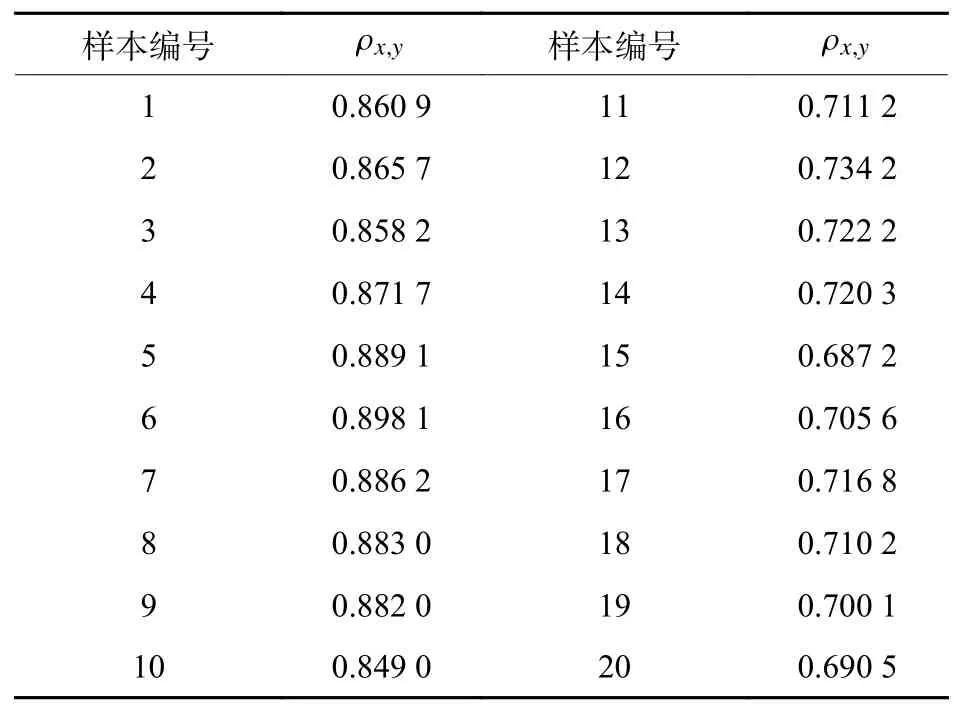
表1 埋地管道样本两点泄漏和未泄漏分类结果Table 1 Two-point leakage and non-leakage classification results of underground pipelines sample
取40 组未泄漏信号按照每10 s 采集一组信号数据依次分为初期信号(10 组)、中期信号(10 组)和后期信号(20 组),首先对前10 组初级信号进行累加平均算法处理,得到了未泄漏参考信号的初级模板。如图4 所示,且经过样本差值系数的计算,该初级模板合格,可作为参考初级模板用于最终泄漏点的定位判断之中。
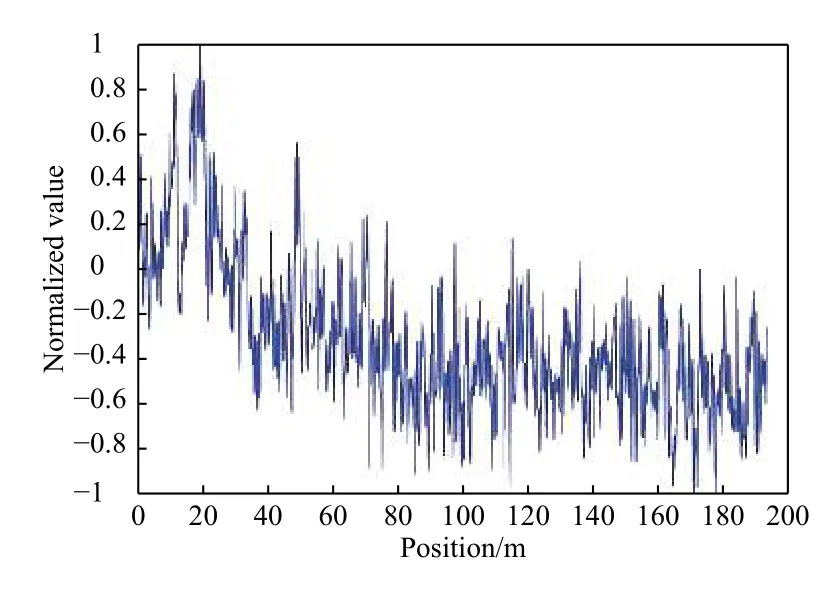
图4 检测信号阈值初级模板Fig.4 Primary template of detection signal threshold
接着,分别计算20 组后期信号与初级模板信号之间的差值系数δ,由(10)式得到后期信号与初级模板之间的相似系数γ,为了能够更加准确地确定最终模板,以 γ=0.83 为阈值,剔除20 组后期信号中不满足条件的样本信号,将满足条件的检测样本信号进行累加后取平均值,所得的信号作为选择性阈值算法的最终模板信号,如图5 所示。与图4 初级模板信号相比,最终的模板阈值信号更加平稳,这是由于样本相似的差值系数计算后剔除了相差较大的结果。
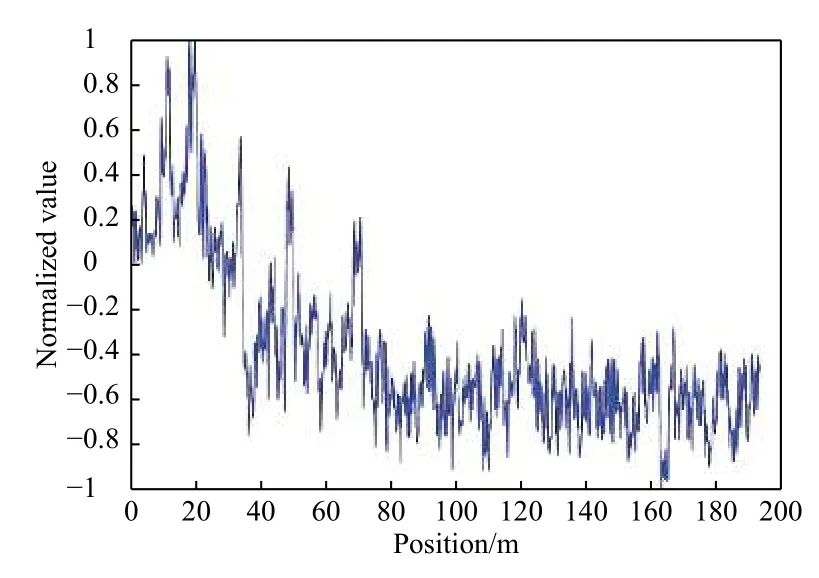
图5 未泄漏温度检测信号阈值最终模板Fig.5 Final template of non-leakage temperature detection signal threshold
最后,确定泄漏位置,取40 组有泄漏信号分别与最终阈值模板进行对比,得到差值信号后进行累加平均后归一化,结果如图6 所示。由图6 可以看出,差值信号在19.75 m 以及34.35 m 处的值明显高于其余位置,说明这两处的土壤介质温度发生了变化,利用拉曼散射以及光时域反射定位原理,可以确定该两点为埋地管道的泄漏点位置,其中19.75 m 为模拟UPVC 管道泄漏点,34.35 m 为模拟铸铁管道泄漏点。
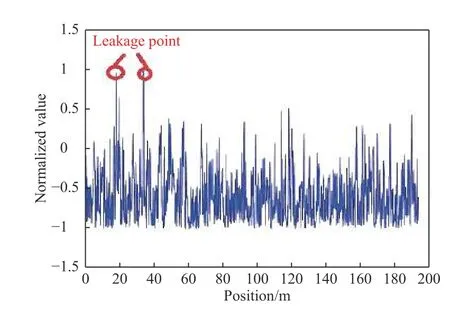
图6 埋地水管道泄漏点定位Fig.6 Leakage points location of underground water pipes
4 结论
本文基于拉曼散射和光时域反射技术相结合的分布式光纤测温系统进行了模拟自来水管道泄漏检测及定位实验,采用传感光纤为200 m,取10 组无泄漏信号和10 组有泄漏信号作为测试样本,利用相关系数法对两组典型泄漏检测信号和未泄漏信号进行了 ρx,y分类,识别了UPVC 埋地管道和铸铁管道的泄漏情况;再对40 组无泄漏信号进行了选择性平均阈值分析处理,所得信号作为泄漏定位的阈值信号;最后分析了阈值信号与泄漏信号的差值信号,判断出UPVC 埋地管道接铸铁管道后泄漏点位置为19.75 m 以及34.35 m,水管实际泄漏点位置为20 m 以及35 m,定位误差分别为0.25 m 以及0.65 m。
猜你喜欢
风流一代·经典文摘(2023年5期)2023-05-21 11:42:11
电子测试(2018年22期)2018-12-19 05:12:06
电子测试(2018年18期)2018-11-14 02:30:36
能源(2017年10期)2017-12-20 05:54:07
能源(2017年5期)2017-07-06 09:25:54
电子制作(2017年8期)2017-06-05 09:36:15
光学精密工程(2016年1期)2016-11-07 09:01:00
电子制作(2016年21期)2016-05-17 03:52:50
雷达与对抗(2015年3期)2015-12-09 02:38:50
自动化博览(2014年12期)2014-02-28 22:34:27
