用于激光测距的小F 数接收光学系统设计
2020-03-05 03:11潘俊旭谢洪波
应用光学 2020年1期
潘俊旭,谢洪波,马 骏,陈 悦,杨 磊
(1.天津大学 精密仪器与光电子工程学院,光电信息技术教育部重点实验室,天津 300072;2.中航工业飞行自动控制研究所,陕西 西安 710065)
引言
自上世纪1960 年代激光技术问世以来,就因其单色性好、方向性好等特点,被广泛应用于各种领域。激光测距是激光最早应用的领域之一,在经历四、五十年的发展后,激光测距技术日臻成熟,在军事领域中有着广泛的应用,特别是在侦查、瞄准、制导等方面均发挥着重要的作用。自2006 年美国重启激光跟踪验证项目的研究以来,轻型化的激光测距装置越来越受到重视,如何以小的体积实现更高效、更快速的距离测量成为激光测距领域研究的重点。当前,国内外的研究机构都投入大量精力进行研发,澳大利亚的ESLR 系统实现测距距离为12 km,美国的ELRF 系统测距距离最远可达50 km。我国目前装备有85 式和88 式测距仪,但在探测距离、探测精度等方面还有着提高的空间[1-3]。
远距离和高精度的激光测距对接收光学系统提出了严格要求,特别是对于非合作目标的漫反射接收。为提高接收效率则要采用大口径的接收镜头来获取足够能量的反射信号。而更快的响应速度需要更小靶面的探测器进行信号接收和处理,同时还需要保证具有合格的成像质量。在光学接收系统中还需考虑杂散光的影响,若不采取有效措施进行抑制,就会产生大量的噪声影响信号检测[4]。因此,提高接收光学系统的效率和精度成为解决上述问题的关键。
为了实现大通光孔径的接收和快速响应,本文设计了基于非球面透镜的小靶面大孔径接收镜头进行激光接收。采用3 组4 片式基本结构,优化设计了通光孔径120 mm,F 数为0.6 的接收光学镜头,可为靶面为75 μm 的探测器所接收,同时满足小型化的要求。
1 接收系统的理论模型
针对作用于远距离非合作目标信号漫反射接收的1 064 nm 光学镜头,接收系统的通光孔径的计算公式如下[5]:

式中:R0为测距距离(cm);μ为红外波段在大气中的衰减系数;D0为接收镜头的入瞳孔径(cm);D*为探测器归一化探测度(cm·Hz(1/2)/W);J为目标与背景的辐射强度之差(W/sr);τ0为接收镜头的透过率;Dd为像面探测器的有效面积;Δf为探测器的等效噪声带宽;SNR 为探测器能够分辨的最低信噪比。拟探测的最远距离为50 km,并采用像面尺寸为75 μm 的探测器,经过计算得到接收镜头的入瞳孔径为120 mm,根据漫反射目标的特性选择接收视场角为1 mrad。公式(1)基于目标、背景和大气环境的特征参数而建立,可以给出激光测距系统总体性能的度量参数。由(1)式可以看出,探测的最远距离还与接收镜头的透过率有关,为保证更高的透过率,应当适当减少镜片数量,同时也可以减轻整体体积。
在上述确定的参数基础上,本文选择以Petzval结构作为镜头的初始原型。原始的Petzval 结构为三组四片式,由2 个正光组和1 个负光组组成[6-7],如图1 所示。

图1 匹兹伐镜头Fig.1 Petzval lens
传统的Petzval 结构具有的大孔径和小视场的特性符合应用要求,但会引入大的球差和场曲。根据Seidel Aberrations 中球差的表达式:

式中:nk'为像方折射率;uk'为像方孔径角;∑合式为各个面的初级球差分布系数。由(2)式可知,在优化设计中采用正负透镜配合进行消球差[8]。场曲的表达式为

式中:J为拉赫不变量;r为第k面的曲率半径。由(3)式可知,场曲是球面本身产生的,可以通过增加透镜的厚度进行平衡。由于采用的是单点探测器,也可通过离焦方式来平衡镜头产生的场曲。
2 接收系统的设计
2.1 光学系统的初始结构
经过上述分析,得到光学系统的基本参数如表1 所示。
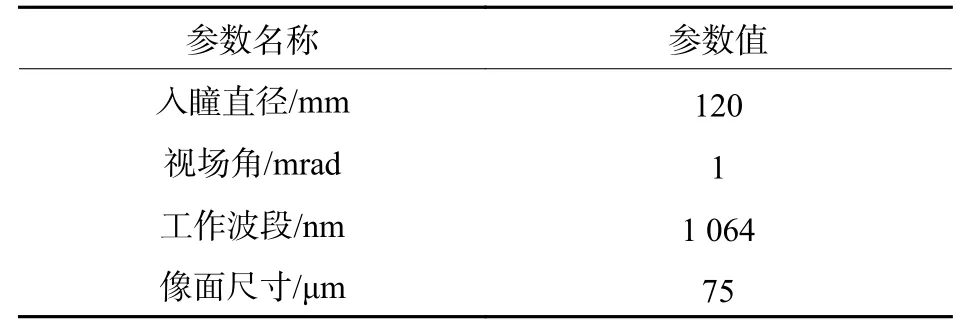
表1 接收光学系统基本参数Table 1 Parameters of receiving optical system
在光学设计软件中对系统进行初步优化,由于使用雪崩光电二极管作为探测器,所以系统是非成像系统,在评价系统性能时以点列图的光斑大小和像面大小作为评价标准。在优化过程中适当增加边缘视场的权重系数,使边缘视场的光斑可以被探测器接收。经过初步优化,得到的初始结构如图2 所示。

图2 接收系统初始结构Fig.2 Initial structure of receiving system
此时镜头的总体长度为367 mm,不能满足小型化的要求,在结构方面还需作出改进优化。点列图如图3 所示。

图3 初始接收系统点列图Fig.3 Spot diagram of initial receiving system
可见系统仍存在较大的球差,并且此时像面的大小为94 μm,光斑尺寸大于探测器靶面尺寸,无法满足要求。
2.2 接收系统的优化
鉴于初始长度过长以及成像质量无法满足要求的问题,需要对光学镜头进行进一步的改进优化。设计结果显示,主要存在的像差是球差,对其中各个光组进行分析可知,系统整体存在较大的负球差,若引进负透镜进行校正,一是会降低系统的透过率,致使测量距离下降;二是会增加系统的复杂度。
通过上述分析,决定引入非球面进行像差的校正,利用非球面可以有效减小球差。同时,非球面可以有效改善边缘视场的成像质量,使结构得到简化,获得更大的通光孔径。国内外已有多家单位具备加工检测的能力,这使得非球面在光学设计中有了更广泛的应用[9],因此选择引入非球面进一步优化。非球面的面型坐标可定义为

式中:c为表面极位置的曲率;K为二次曲面系数;r为XY坐标系中任一点到原点的距离;ai为非球面的高阶系数。非球面放置在接收镜头的不同位置对校正像差有不同的效果,考虑加工难度和成本,将非球面设置在最后一组透镜的前表面。
为了使结构更加合理,设计将第二组双胶合透镜变为负透镜组,将原来的“正-正-正”的结构改变为“正-负-正”的结构,最大程度减小球差。在引入非球面和改变光焦度分配后,保持优化条件不变,重新进行优化设计。
2.3 优化后的光学系统设计结果
经过优化后的光学系统设计结果如图4 所示。

图4 优化后接收光学系统Fig.4 Optimized receiving optical system
图4 中优化后的接收光学系统结构整体长度约为108 mm,符合小型化的设计要求。此时镜头的像面尺寸为74 μm,点列图如图5 所示。
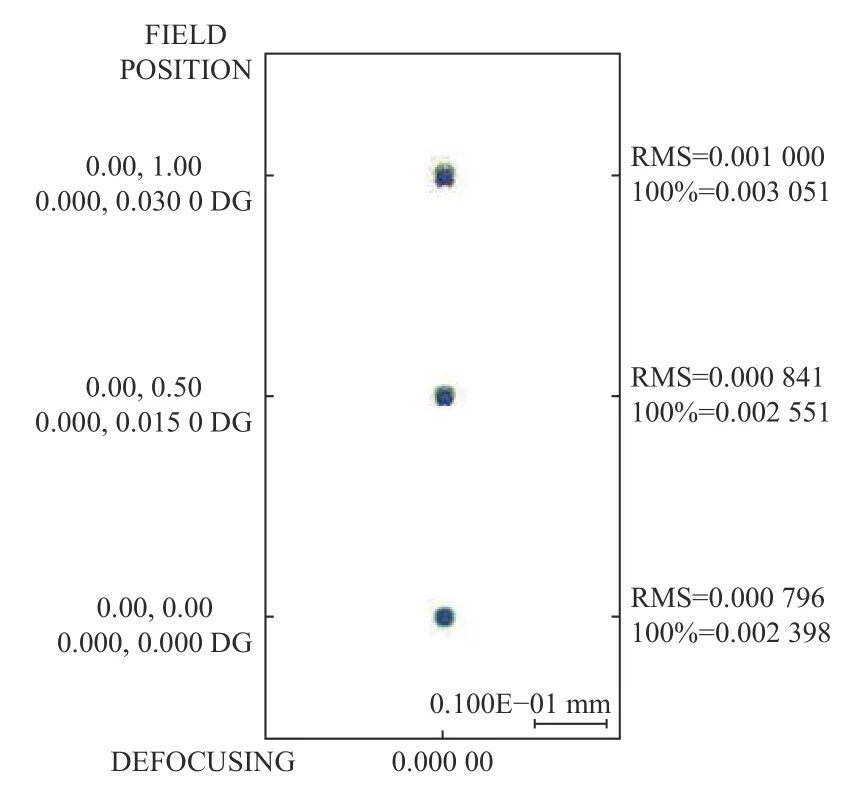
图5 优化后接收光学系统点列图Fig.5 Spot diagram of optimized receiving optical system
由图5 可知,系统的RMS 直径最大为1 μm,故边缘视场的光线也能被探测器接收。再对纵向球差、场曲、畸变进行分析,如图6 所示。
由图6 可知,系统的纵向球差在±0.25 μm 之间,子午与弧矢的场曲曲线重合表示无像散,且场曲中子午和弧矢的场曲都为0.25 μm。由畸变图可以看出,系统无畸变,满足应用需求。
激光测距系统应用在大气环境中,因此外界的杂散光会对接收镜头产生较大影响,需要在接收镜头中放置滤光片进行消杂散光。对于本文设计的接收镜头,若滤光片放在第一片镜片前,则需要大孔径的滤光片,这样在镀膜时会出现整个滤光片各处不均匀的情况,导致带宽变大,会引入更多噪声。故考虑将滤光片作为一个单独的镜片放在非球面透镜前,但在此位置光线入射角度不为零。由于干涉效应,滤光片的中心波段会向短波偏移,根据多层介质膜的矩阵求解法[10-11],可得滤光片的反射率:
式中:R是滤光片的反射率;η0为入射介质的导纳;B和C为介质膜的特征矩阵的2 个复向量。通过计算得到滤光片的最小漂移为15 nm,峰值透过率可在85 %以上,能够满足实际应用的需求。滤光片在光路中相当于平行平板且厚度薄,对成像和光线的影响可以忽略[12]。加入了滤光片的系统如图7 所示。
3 公差分析
光学设计通常对加工精度有较高要求,在机械设备中允许的误差可能会对接收镜头性能产生大的影响。但如果公差设置过于严格,就会提升加工和装调的难度,导致在实际应用时达不到设计的理想效果[13]。所以,利用CODEV 软件对公差进行分析,设置的公差参数如表2 所示。
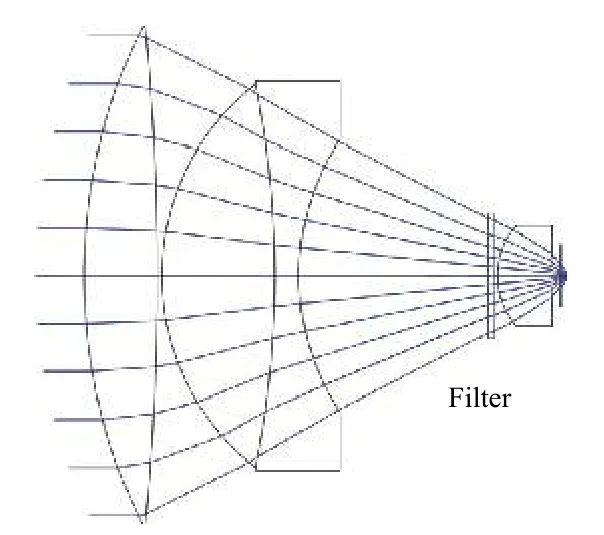
图7 加滤光片后的接收光学系统Fig.7 Receiving optical system with filter

表2 公差分析参数Table 2 Parameters of tolerance analysis
以1 064 nm 波段处的RMS 半径为准则进行公差灵敏度分析[14-15]。由蒙特卡罗分析法的结果可知,边缘视场在80%处的RMS 直径扩大了0.5 μm,这个结果对于探测器能量的检测无影响。同时得到了对成像光斑大小影响最大的参数是厚度公差,需要在实际加工时提高镜片厚度的精确度。
本文设计的大孔径小靶面接收光学系统,具有120 mm 的入瞳孔径,像面尺寸为75 μm,F 数达到了0.6,虽然加入的非球面镜片和大口径镜片会增加光学加工的成本,但相对于性能方面的提升,这种成本增加是可以接受的。
4 结论
研究了一种应用于远距离非合作目标激光测距的光学接收系统。为了有效地提高接收能量的效率并对信号做出快速响应,设计了小靶面大孔径透射式接收光学镜头,对传统的Petzval 结构做出改进,通过引入非球面解决了传统Petzval 结构固有的球差和场曲问题。通过设计优化后,接收系统整体长度为108 mm,接收系统的通光孔径为120 mm,探测器靶面为75 μm,F 数为0.6,光斑大小满足系统要求,场曲和畸变都小于0.25 μm,可应用于机载系统中。由于引入了非球面镜片,会增加镜片加工和检测的成本,同时由公差分析结果可知,接收镜头的高级像差较大,公差敏感度高,后期装调的难度会有所提高,可通过高精度的调节设备进行装调来克服。该研究成果可为机载激光测距接收系统的设计提供参考。
猜你喜欢
中国军转民(2019年11期)2019-09-10
西南石油大学学报(自然科学版)(2018年2期)2018-06-26
制造技术与机床(2017年11期)2017-12-18
CHINESE JOURNAL OF AERONAUTICS(2017年5期)2017-11-17
雷达学报(2017年1期)2017-05-17
兵器装备工程学报(2016年9期)2016-10-20
航天制造技术(2016年6期)2016-05-09
中国塑料(2015年9期)2015-10-14
组合机床与自动化加工技术(2014年12期)2014-03-01
天文研究与技术(2013年4期)2013-12-18