
北斗高精度定位技术在边坡变形监测中的应用
2020-03-05 09:24:58李家春宋宗昌侯少梁王利婷范小力
中国地质灾害与防治学报 2020年1期
李家春,宋宗昌,侯少梁,王利婷,范小力
(长安大学特殊地区公路工程教育部重点实验室,陕西 西安 710064)
0 引言
近年来,国家经济得到了飞速的发展,更加关注西部贫困地区的经济发展问题,对于西部地区的交通基础设施建设的投资也越来越多。西部山区地面起伏较大,修建高速公路难度较大,成本较高,同时会产生大量的挖方和弃方边坡。公路边坡是在人为作用下形成的,通常情况下是交通基础设施中最为脆弱的部分,因此,保障交通基础设施安全高效运行的有效途径之一就是对边坡的变形进行监测。
传统的边坡监测方法主要是利用全站仪等仪器进行监测,其受到地形的影响较大,需要长期人工测量,且易造成人工测量误差等。而利用北斗技术对边坡进行监测,具有选点灵活、受地形等条件限制较少、自动化程度高、能够实时动态监测等优点[1]。
本文以贵州都匀高速某高边坡变形监测为工程背景,应用北斗高精度GNSS监测仪,将北斗技术与边坡变形的实时监测与预警相结合,提高了对于边坡变形监测的效率,同时结合北斗云监测系统,实现了从数据采集到结果显示的全过程自动化。
1 基于北斗技术的边坡变形监测系统
北斗云监测系统是基于北斗卫星导航系统,利用北斗高精度GNSS监测仪对边坡的位移变形量进行监测,并通过传输模块将监测数据实时回传到监测云平台,对监测数据进行处理分析,同时生成监测报告。该系统主要包括数据采集、数据传输、数据分析和结果显示四个部分,能够实现从数据采集到数据分析再到监测结果显示的全过程自动化。
1.1 北斗卫星导航系统简介
北斗卫星导航系统(BDS)是我国自行研制的、具有完全知识产权的全球卫星导航系统。
2012年12月27日起,我国的北斗卫星导航业务正式开始对亚太地区提供无源定位、导航和授时服务[2-3]。2018年12月27日,我国北斗三号导航基本系统已经完全建成,开始向全球提供导航服务[4]。
1.2 北斗高精度GNSS监测仪
监测设备主要为北斗GNSS监测仪,仪器主要由GNSS定位天线、太阳能电池板、主机箱三部分组成。整个GNSS监测仪布置在现场浇筑的水泥墩上,水泥墩埋入地下60 cm,露出地面20 cm,可以防止因设备安装不稳导致的测量误差,同时可以减小下雨时雨水汇集对设备的损害。设备安装如图1所示,最顶端为GNSS定位天线,用来接收北斗定位信号。往下是太阳能电池板,太阳能电池板下面为主机箱,里面包括蓄电池、北斗定位模块、数据传输模块和数据天线等。数据传输模块内置一张4GSIM卡,通过与数据天线的协同作用,对监测数据进行无线传输。

图1 监测设备及其安装图Fig.1 Monitoring equipment and its installation diagram
北斗GNSS监测仪开始工作时,先通过定位模块获取定位数据,然后定位数据通过数据模块和数据天线利用4G无线网络传输到监测云平台。
1.3 监测云平台
北斗GNSS监测仪将监测数据传输至数据汇总站,然后通过4G网络传输方式将数据上传至监测云平台进行数据储存。
监测云平台接收数据,根据预设的预警模型对GNSS数据进行处理与分析,并对位移量超过限定值的监测结果进行三级预警,同时编制监测报告,发布预警信息。用户及相关人员可以经过网络授权,通过PC客户端或手机APP看到各监测点在选择的监测周期内的监测数据、变化曲线和监测报告。同时工程技术人员可以根据现场查勘对监测报告进行修正,避免系统误报的情况发生。
2 北斗技术在变形监测中的优势
随着第三代北斗导航系统建设的推进,北斗定位的精度不断提高,目前北斗高精度定位技术也逐渐被应用于各种工程领域。肖玉钢等[5]通过优化识别算法分析实测数据,得到了毫米级定位精度,验证了利用北斗技术应用于变形监测的可行性。和永军等[6]将北斗高精度位移监测技术应用于桥梁健康监测中,实现了桥梁变形的全天候、自动化的监测。吴焕琅等[7]将北斗高精度定位技术应用于大坝形变监测,通过对定位数据进行误差修正,达到了毫米级的精度,实现了北斗大坝形变监测。研究表明北斗定位技术用于缓慢变形监测的研究已足够成熟,完全可以用于边坡工程的变形监测。
相对于传统的变形监测技术,利用北斗高精度变形监测技术对边坡变形监测具有以下优势:
(1)自动化程度高
与全站仪等传统的测量工具相比,利用北斗进行监测可实现自动监测、自动记录。监测过程不需要人工操作,能够实现一次布置,多年随时随地获取测量数据。
(2)监测效率高
传统的监测方法监测效率低,获取数据少,而利用北斗进行边坡位移监测可实现数分钟内得到一组精确定位数据,能够实时监测边坡的变形。
(3)可全天候稳定工作
北斗定位所使用的GNSS监测仪不易受到温度、湿度、天气和昼夜变化的影响,不需要经常维护,基本可以达到一次安装、多年使用的要求。与传统的测量手段相比,利用北斗技术监测边坡变形可以实现全天候全自动的稳定工作。
(4)对地形要求低
北斗定位设备不要求通视条件,受地形、植被影响较小,且体积小、额定功率低,可使用太阳能电池供电,不需要较大的空旷区域,设备的安装和拆除也很方便。
(5)符合国家发展战略
过去我国定位和导航产业长期依赖于美国的GPS定位系统,对于国家的安全和可持续发展产生了巨大的威胁。而如今,我国自主研发了自己的北斗卫星导航系统,同时国家大力推广北斗卫星导航系统在民用工程中的应用。因此,将北斗卫星导航技术应用于边坡安全的在线监测工程,符合国家北斗卫星导航的发展战略。
3 边坡变形监测系统的误差分析
3.1 北斗卫星导航系统定位误差
北斗卫星导航系统的误差主要来源于北斗卫星导航系统的定位误差。根据是否有参照位置,北斗卫星导航系统的定位方法可以分为绝对定位和相对定位。
绝对定位又称为单点定位,定位精度相对较低,水平和竖直方向误差小于10 m[8],可用于卫星导航中,但不能满足边坡变形监测对精度的要求。相对定位主要是指利用两台或多台北斗监测仪同时进行定位(图2)。其中,放置在被监测地点的北斗监测仪被称为监测站,而另一台起到基准参照点作用的北斗监测仪被称为基准站。这样可以有效的降低北斗卫星导航系统的定位误差,提高监测精度。同时可以通过延长相对定位的时间,实现监测系统的毫米级定位。

图2 相对定位示意图Fig.2 Sketch of relative positioning
3.2 北斗监测系统精度试验
3.2.1试验目的
本次试验主要测试边坡变形监测系统的精度,确定北斗相对定位的精度和定位时长的关系,以满足高边坡变形监测的精度要求。由于北斗GNSS监测仪的水平方向精度大于竖直方向精度,在边坡变形监测中,水平方向的监测数据更为可靠。因此本次试验只测试北斗监测系统在水平方向上的精度。
3.2.2试验环境
利用北斗相对定位进行精确测量时,应确保周围无山体、树木等遮挡,同时要确定至少可以搜索到4颗及其以上的北斗卫星。因此本次试验将监测站设置在长安大学水力实验室的楼顶,将基准站设置在附近500 m外的空旷草地上,两点附近均无遮挡,可以通视。
3.2.3试验方案
本次试验通过移动监测站,利用直尺和北斗相对定位的方法,同时测量水平方向上的位移,由于试验每次挪动监测站的距离较短且试验周期相对较短,可认为直尺测量位移为实际位移,通过对比两者之间的差值,分析北斗相对定位在水平方向上的精度。
试验装置由直尺、北斗定位设备、滑块组成。在远处放置另一台北斗定位设备作为基准站,由北斗定位设备和滑块组成监测站。对于监测站,试验时,滑动滑块至目标位置,以直尺测量的滑动距离为标准,通过北斗相对定位的位置变化与直尺测量的位置变化进行对比,分析出北斗相对定位水平方向上的精度。
具体的试验步骤如下:
(1)将北斗定位天线固定在滑块上,将滑块放置在水平面上,在其旁边放置一把直尺;
(2)记录北斗定位天线对应直尺的刻度,同时使用北斗相对定位时间T1,得到一次定位结果;
(3)调整定位时长Ti,得到不同时刻的定位结果完成一组试验,分析不同定位时长的北斗相对定位精度;
(4)缓慢挪动滑块,使滑块水平挪动10 mm(相对于直尺);
(5)重复步骤(2)~(4)共20次,完成试验,得出不同北斗点对定位时长T对应的定位精度。
3.2.4试验结果
定位时长T分别选为1 min、1 h、6 h和24 h四个时间长度,并以水平直尺的刻度变化为横坐标、以北斗测量的水平位移量为纵坐标作图(图3)。
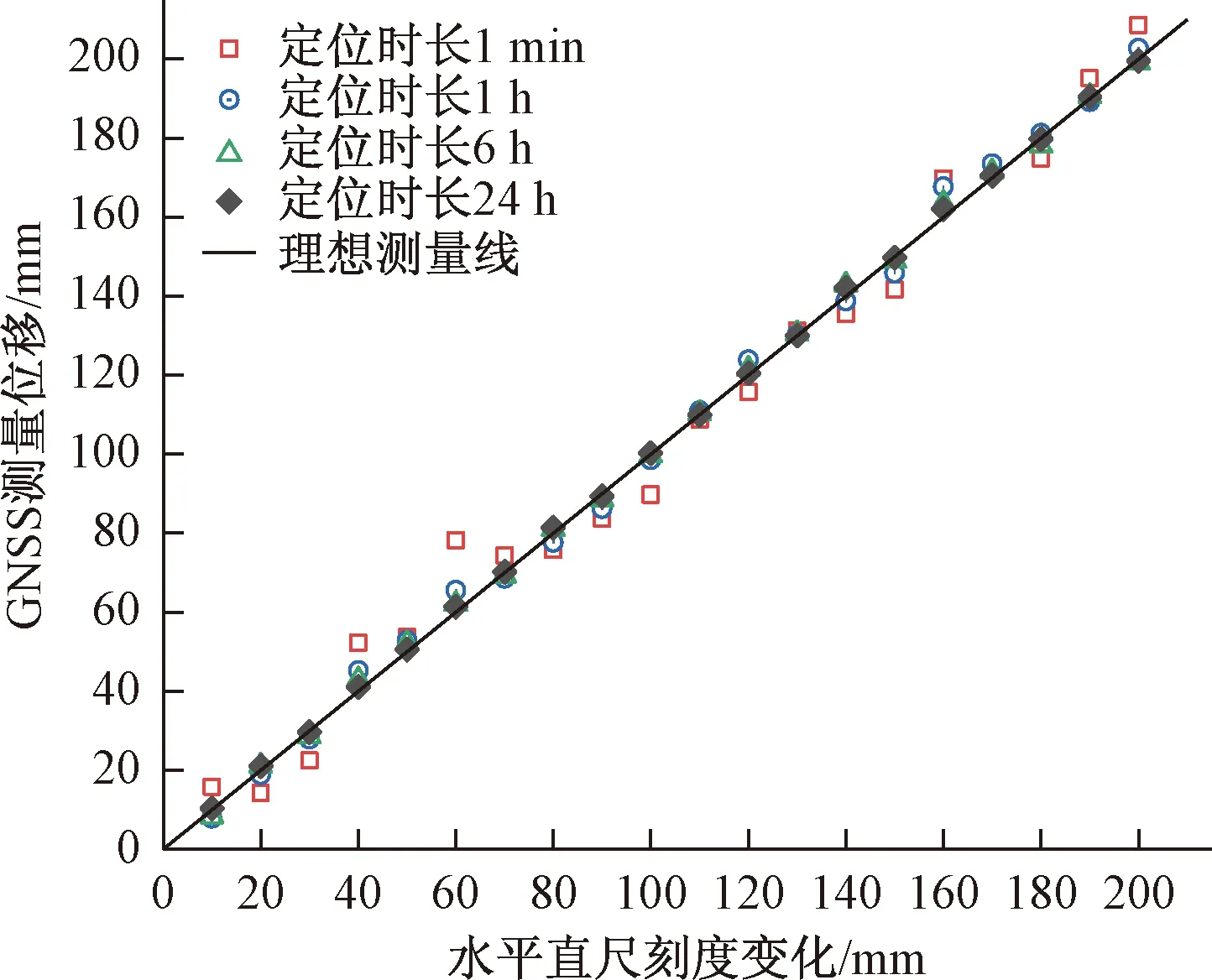
图3 北斗变形监测系统精度试验结果Fig.3 Results of Beidou deformation monitoring system accuracy test
图3为北斗变形监测系统的精度试验结果。可以明显看出定位时长越长,监测系统的精度越高,更接近于理想测量线。当定位时长为1 min时,变形监测的最大误差为18.267 mm;定位时长为1 h时,变形监测的最大误差为7.692 mm;定位时长为6 h时,变形监测的最大误差为3.497 mm;定位时长为24 h时,变形监测的最大误差为2.071 mm。由于工程中实际使用的北斗监测仪使用太阳能供电,具备可全天候稳定工作的能力,因此,选择定位时长为24 h,最大限度的提升其监测精度。
4 实际应用
4.1 工程简介
本次监测工程为都安高速20标段某路堑边坡,中线挖方高度2.56 m,左侧最大挖方高度82.2 m。该高边坡区所处于剥蚀丘陵硬质岩区,山体较陡,自然状态下山体稳定。既有高速公路边坡开挖坡度为1∶0.75,坡脚取53°,顶部平缓,坡向约8°,线路中心最大挖方深度82.2 m。最下一级边坡设置抗滑桩挡墙,上几级边坡采用锚杆框架梁防护,顶部设置截水沟。坡面植被稀疏,主要低矮灌木,大面积基岩出露。深挖路堑内未发现断层构造,岩层主要为中风化灰岩,岩层产状为112°∠49°,主要发育三组节理,分别为J1:10°∠78°、J2:99°∠58°和J3:339°∠55°。区内的新构造运动以断裂的继承性和断块的差异性活动为基本特征。第四系以来,区域内没有较大破坏性影响的构造运动。边坡体主要由中风化灰岩、泥质灰岩、燧石灰岩、页岩构成,节理裂隙较发育,可能形成不稳定楔形岩体,对边坡稳定不利,利用赤平投影法对边坡稳定性进行分析。边坡坡面、岩层面、节理J1、J2、J3的倾向和倾角如表1所示,绘制赤平投影如图4所示。

表1 赤平图投影参数Table 1 Parameters of stereographic projection

图4 赤平投影分析图Fig.4 The analysis diagram of stereographic projection
根据赤平图可判断出边坡整体稳定性较好。根据《公路路基设计规范》(JGJD30—2015)对高边坡监测的要求,采用北斗技术对该边坡实施动态监测。
4.2 监测点布设
由于该公路路堑边坡目前处于基本稳定状态,对其实时动态监测,主要是监测其位移量变化,判断其稳定状态。该边坡坡底及坡面已进行了工程加固,变形量较小,不能准确地反映边坡整体的状态,而坡顶受到累计位移的影响,整体变形量会较大,因此,将3个GNSS监测仪均布设在边坡的坡顶位置,分别位于K127+520,K127+620和K127+700位置处,并将其分别命名为北斗1#、2#和3#(图5)。同时在公路右侧山顶上布设1个GNSS监测仪作为基准站和数据汇总站。

图5 监测网点布设示意图Fig.5 Monitoring network layout
4.3 监测结果分析
自2018年8月中旬上线以来,监测系统一直处于稳定工作状态。系统设置每天监测时长24 h,即监测仪不间断工作,每天回传一组数据。图6~图8所示为监测开始到2019年7月初各点的监测结果。

图6 北斗1#增量位移Fig.6 Beidou 1# incremental displacement
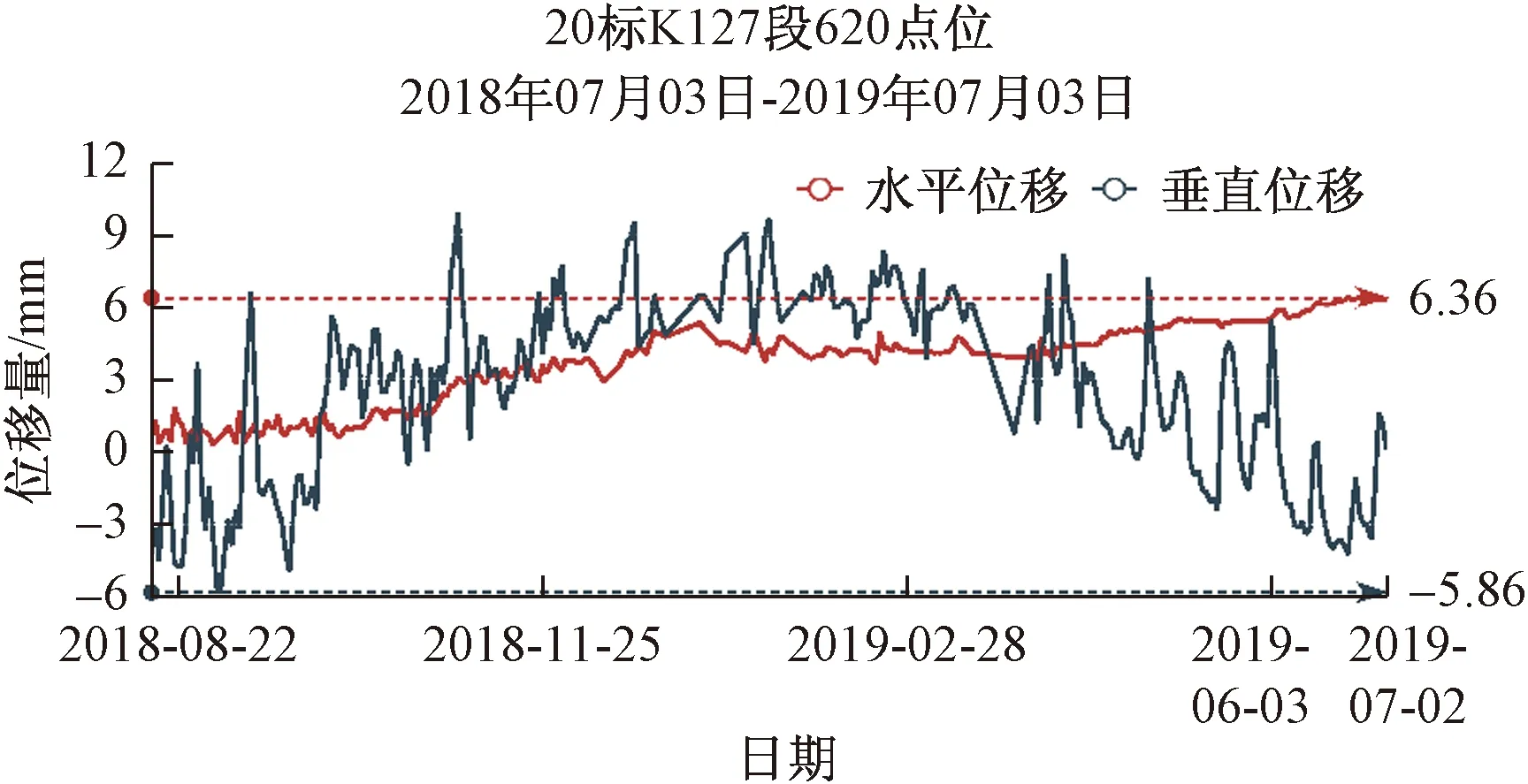
图7 北斗2#增量位移图Fig.7 Beidou 2# incremental displacement

图8 北斗3#增量位移图Fig.8 Beidou 3# incremental displacement
图6~图8为边坡监测点的累计位移量,图中水平位移和竖直位移的曲线均处于波动状态,由于北斗监测的竖直方向的精度较低,因此在分析边坡变形时,以水平方向的位移为主。北斗1#监测点的水平方向的累计位移最大为8.37 mm,竖直方向累计位移在-4.64~6.59 mm波动;北斗2#监测点水平方向的累计位移最大为6.36 mm,竖直方向累计位移在-5.86~10.02 mm波动;北斗3#监测点水平方向的累计位移最大为5.58 mm,竖直方向累计位移在-7.57~3.64 mm波动。
1#监测点位的水平方向的位移量自2019年入春以来呈现快速增长的趋势,水平位移达到了8.37 mm。初步认定为由于降雨量的增加,使边坡产生了较小的位移,应进一步观察该点的位移状况,若位移量继续快速增大,应结合现场的状况,对边坡采取有效的防护措施,防止灾害的发生。2#和3#监测点位的水平方向位移均小于6.5 mm,且没有明显的加快趋势,考虑到水平方向的位移精度为2.061 mm,认为2#和3#点位的水平方向位移均小于9 mm,因此可判断2#和3#点位处于稳定状态。综合3个点位的位移变化规律,可认为,该边坡目前处于稳定状态,但须对1#点位加强观测,若变形持续增大,应采取一定的防范措施。
5 结论
本文简要概述了将北斗技术用于对边坡变形监测的可行性,并且成功的将其应用于贵州都安高速某高边坡的位移监测。结论如下:
(1)北斗位移监测具有自动化程度高、布设灵活、受地形影响较小、可全天候稳定工作的优点。
(2)通过变形监测试验认为,利用北斗云监测系统对边坡变形进行监测,其精度水平可以达到水平方向2 mm左右,完全可以满足边坡变形监测的精度要求。
(3)贵州都安高速某高边坡的位移监测表明北斗技术完全可以用于实际边坡的变形监测,值得广泛推广。
猜你喜欢
音乐教育与创作(2023年10期)2023-11-16 10:04:54
军事文摘(2023年20期)2023-10-31 08:42:08
小哥白尼(神奇星球)(2022年3期)2022-06-06 07:40:04
当代陕西(2019年18期)2019-10-17 01:48:50
电子制作(2018年9期)2018-08-04 03:31:16
电子制作(2018年12期)2018-08-01 00:47:46
现代工业经济和信息化(2016年22期)2016-08-23 11:55:32
太空探索(2016年3期)2016-07-12 09:58:47
电子制作(2016年23期)2016-05-17 03:53:31
水利科技与经济(2016年8期)2016-04-22 03:41:38
