LWT-FLP去噪算法在FBG传感器信号处理中的应用*
2020-03-04 05:13:14尹凌
计算机与数字工程 2020年1期
尹 凌
(广东省农垦湛江技工学校 湛江 524091)
1 引言
在分布式光纤光栅(FBG)传感器检测方法中,信号处理的精度对保障最后的精度具有重要的意义,尤其是在一些复杂的场合。同时也受到传感网络设计的影响,就有可能对测量结果是否有效造成影响,降低系统整体的检测精度,严重的有可能导致得不到正确的检测结果,最终影响整个检测结果的可靠性[1~6]。因此,开发某种算法来提高信号处理精度就显得很有必要。
相关学者开着了此方面的研究,并取得了很好的成果[7~9]。但它们的研究多是单独采用利用小波变换和前向线性预测(Forward Linear Prediction,FLP)算法来进行[10~12]。小波变换是一种时间-尺度分析方法,在时间、尺度(频率)两域都具有表征信号局部特征的能力,在低频部分具有较低的时间分辨率和较高的频域分辨率,在高频部分具有较高的时间分辨率和较低的频率分辨率,很适合于探测正常信号中夹带的瞬间反常现象并展示其成分[13~15]。前向线性预测(Forward Linear Prediction,FLP)算法的主要思路是把先前的陀螺信号乘以相应的权重来预测当前时刻的陀螺信号。这两个算法在分析问题的时候具有各自的优点,本文为了获得更好的去噪效果,将提升小波变换(LWT)和前向线性预测(FLP)算法的优势结合在一起,提出了一种新的去噪LWT-FLP去噪算法,并成功应用于FBG传感器信号处理中。
2 LWT-FLP去噪算法
2.1 提升小波变换
所谓小波是指由一个基本小波或母小波ψ(t)经过伸缩和平移之后获得的一个小波序律,ψ(t)∈L2(R),L2(R)表示平方可积的实数空间,即能量有限信号空间,其傅里叶变换为 ψ^(ω)。 ψ^(ω)满足容许条件:

在连续情况下,小波序律为

假设 x(t)是平方可积函数,记作 x(t)∈L2(R),ψ(t)是被称为基本小波或母小波(mother wavelet)的函数,则有:

在实际应用中,尤其是在上位机实现时,连续小波必须实现离散化。相应的离散小波变换为

图1是用提升方法进行小波分解和重构的示意图。
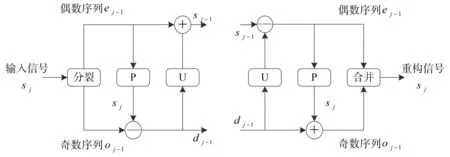
图1 提升方法的分解和重构
2.2 前向线性预测算法
当前陀螺信号的估计值为

上 式 中 , X(n-1)={x(n-1),x(n-2),…,x(n-N)}T为先前时刻陀螺输出所组成的向量;x(n-p)为先前时刻的陀螺信号;αp为权重;N为阶数,阶数越大,滤波的效果越好,但是过大的阶数也会加大滤波过程的计算量。预测值与当前值之间的差(前向预测误差)和代价函数分别为

根据最小均方值理论来最小化前向预测误差,即要选择合适的权重以使代价函数取的极小。由最小均方值理论可得权重的迭代调整公式为

上式中,ε是一个极小的正常量,用以控制整个迭代过程的收敛速度。在FLP预测过程中,预测误差与步长是密切相关的。在初始阶段,预测误差较大,步长的选择应该使预测误差快速降到一定的程度,所以可以选取相对较大的步长;当预测误差降到一定程度后,再采取小步长以提高稳态输出精度。由于ε的调整是与预测误差有关的,因此可使用下面的自适应变步长算法:

上式中,e(n)为估计误差;β为由预测过程决定的加权系数;α为衰减系数。可通过多次试验来获得β和α的最优值。FLP算法的结构如图2所示。

图2 基于自适应的FLP算法结构
2.3 LWT-FLP算法计算流程
为了获得更好的去噪效果,将提升小波变换(LWT)和前向线性预测(FLP)算法的优势结合在一起,提出了一种新的去噪算法:LWT-FLP去噪算法。其具体计算流程如下:
1)选择提升小波的分解尺度为N,并对各节点的提升小波系数进行单支重构。设其重构后的高频系数为d(t),低频系数为c(t);
2)对提升小波分解得到的高频系数进行灰化处理,即对高频系数d(t)进行累加操作,低频系数为c(t)保留;
3)对步骤2)中描述的灰化后的提升小波高低频系数进行FLP处理。在此预测过程中,预测误差和步长是密切相关的。在初始阶段,预测误差较大,步长的选择应使预测误差快速下降到一定程度,此时可以选取相对较大的步长;当预测误差下降到一定程度,采用小步长以提高稳态输出精度。由于LWT-FLP权系数调整是基于分频段数据块进行的,因此每个频段步长调整应该和频段内预测误差的绝对误差有关。令第j频段内FLP绝对误差的均值为则可将式(1)变换为

4)对提升小波分解得到的系数进行FLP处理后的高频系数d(t)进行累减操作;
5)提升小波重构。
将步骤4)中白化处理后得到的N层高低频系数进行重构,得到LWT-FLP算法去噪后的加速度计输出信号。LWT-FLP算法的结构如图3所示。

图3 LWT-FLP算法流程图
3 实验结果分析
3.1 信号采集实验方案
为验证本文提出的LWT-FLP算法,首先进行了FBG加速度数据采集实验。本实验主要测量管道内部流体压力的脉动,管壁的轴向应变及管壁振动的加速度信号,测试管道的外径为12mm,管子壁厚为1mm。该实验主要研究自由状态下充液管的横向振动和轴向振动的特性。在测试管道上布置了9个FBG加速度传感器,管道的尺寸以及测点的布置如图4所示。
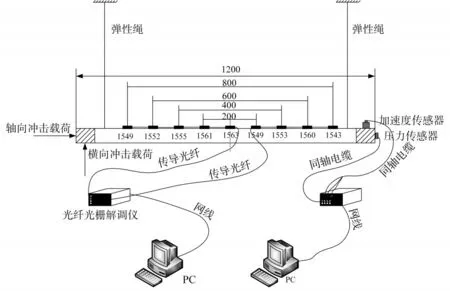
图4 直管试验装置图
被测试管道两端用堵头封闭,管内充满航空液压油,利用激振锤在管路一端进行轴向和横向激励,通过压力传感器和加速度传感器测量管内流体压力和管道振动加速度信号。利用LMS系统的signature acquisition模块采集直管在横向冲击和轴向冲击下的压力信号和加速度信号。在管壁上等间距布置FBG传感器测量管壁的应变,通过检测FBG中心波长的漂移便可知管壁的应变变化,解调仪解调出波长漂移并通过上位机实时显示和保存。
3.2 基于LWT-FLP去噪算法传感器信号处理结果
利用力锤在管路一端进行横向激励,通过加速度传感器和FBG分别检测管路横向振动加速度和轴向应变,测量过程中力锤敲击5次同时记录力锤的敲击信号,其中FBG和加速度的时域波形处理前后的结果见图5所示。
通过处理前后的数据相比较,可以看出,FBG信号去噪前后效果明显,变化趋势基本一致,说明了FBG传感器的准确性以及稳定性与标准电磁流量计几乎一致,所以验证了所设计的矿用超声波FBG传感器具备现场使用的设计要求。
在传统提升小波变换和前向线性预测算法的基础上提出了LWT-FLP算法,该方法充分结合了提升小波变换和前向线性预测算法的优势,首先利用提升小波变化对光纤陀螺信号进行分层,其次对高频噪声进行累积操作,并对高频系数进行FLP处理,再对FLP处理后的高频系数进行白化处理,最后对各频域内的FBG传感器信号进行重构,得到最终去噪后的FBG传感器信号。通过最终分析结果表明,提出的算法能够有效去除噪声对FBG传感器输出信号的影响,有效地证明了提出的LWT-FLP算法在去噪方面的优越性。
3.3 结果对比
图5为不同算法去噪效果的对比图。从图中可以看出,相比传统的FLP算法和G-FLP算法,LWT-FLP算法能够更有效地去除噪声。这是由于首先利用提升小波对加速度计数据进行了多尺度变换,降低了原始数据的不平稳性;其次利用累加操作对高频数据进行灰化处理,使原本无规律的数据体现出一定的规律性,可以有效提高FLP的预测精度。
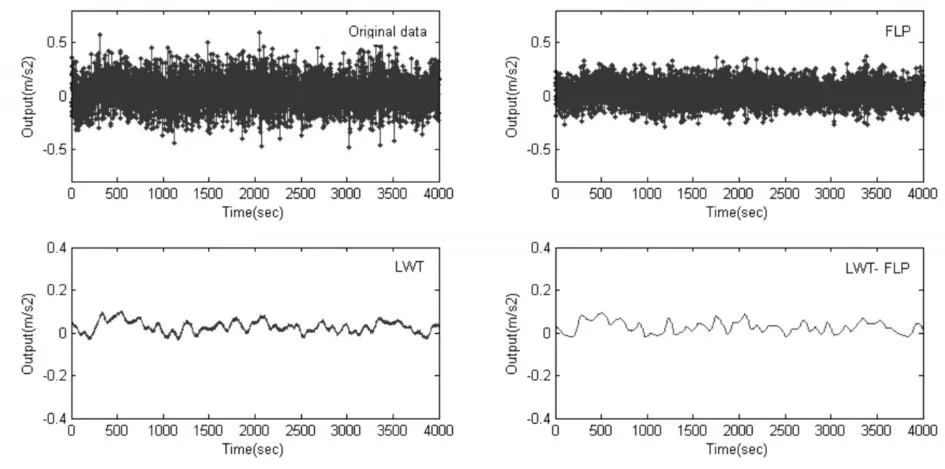
图6 不同算法去噪效果对比图
表1为图6中不同算法去噪结果的均值和方差比较。从中可以看出,利用本文提出的LWT-FLP算法对加速度计输出进行去噪处理,处理后的结果在均值和方差上均有较大的降低。相比传统的FLP和G-FLP算法,LWT-FLP算法体现出了自身的优越性。

表1 不同算法去噪结果均值和方差对比图
4 结语
为了提高传感器信号处理的精度,提出了一种新的去噪LWT-FLP去噪算法,并在FBG传感器信号处理上进行了应用,得到如下结论:
1)利用提升小波对加速度计数据进行了多尺度变换,降低了原始数据的不平稳性;然后利用高频数据进行灰化处理,有效提高FLP的预测精度。
2)提出的算法能够有效去除噪声对FBG传感器输出信号的影响,有效地证明了提出的LWT-FLP算法在去噪方面的优越性,并通过与单一的算法进行去噪结果对比,验证了该算法的准确性。
猜你喜欢
摄影世界(2022年1期)2022-01-21 10:50:14
成都信息工程大学学报(2021年5期)2021-12-30 06:25:30
科技风(2021年19期)2021-09-07 14:04:29
电子制作(2019年13期)2020-01-14 03:15:32
知识经济·中国直销(2018年12期)2018-12-29 12:22:14
制造技术与机床(2017年10期)2017-11-28 05:20:43
商周刊(2017年6期)2017-08-22 03:42:36
山东大学法律评论(2016年0期)2016-08-16 03:24:12
河北科技大学学报(2015年5期)2015-03-11 16:16:37
电测与仪表(2014年8期)2014-04-04 09:19:38