矿井提升机变频调速控制系统的优化设计
2020-03-03 03:21杨腾飞
江西煤炭科技 2020年1期
杨腾飞
(山煤集团煤业管理有限公司,山西 太原,030006)
1 概述
伴随着矿井井型的增大和产能的提高,对矿井提升机的可靠性也提出了更高的要求[1]。矿井提升机若出现超速、过卷、过放等问题,会严重影响矿井正常的安全生产,甚至人员的人身安全[2]。对矿井提升机的控制系统进行研究设计,从而保证矿井提升机运行的稳定性和可靠性,对于矿井安全高效生产的实现具有积极的现实意义。
2 矿井提升机变频调速控制系统硬件设计
2.1 控制系统总体设计
对于矿井提升机而言,其最为重要的控制功能是通过主控制单元来实现的。通过主控制单元可以对矿井提升机的传动、信号、上位机等设备的工况系统实时监控,并对其发出的各种数据信号进行分析处理,以此来保证矿井提升机的正常运转。嵌入式处理器具备设备可靠、易于编程、调试简便等优点,特别是ARM嵌入式处理器因具有优异的产品性能、较低的使用能耗、简易的编程开发以及高度的运行可靠,而被广泛地应用于工业控制领域[3]。因此,本次设计将LPC2131型ARM嵌入式处理器应用于矿井提升机控制系统当中。
LPC2131型ARM嵌入式处理器,是由世界著名的飞利浦公司开发生产的一款由ARM公司授权的32 位嵌入式处理器。该型处理器是以John von Neumann结构的ARM7TDMI-S内核为基础的,通过三级流水线进行运算处理,并且采用16位指令长度的Thumb结构化策略,对于有限的储存容积、复杂的数据密度等情况十分适用。
2.2 变频调速控制方案
本次矿井提升机变频调速控制方案,是通过改变输入电路的频率,进而改变电机的转速快慢,从而达到矿井提升机变频调速的目的。整个变频调速电路将运用交—直—交的转换电路来实现电机的变频调,整个电路系统包括整流、中间直流以及逆变三部分电路。其中输入电路系统的是三相工频交流电,而后通过不可控整流、PWM逆变可以得到具有不同频率的交流电,针对电能处理主要由交—直、直—分转换两个部分组成。矿井提升机变频调速主回路控制电路见图1。

图1 变频调速主回路控制电路
2.3 变频控制系统设计
鉴于矿井提升机实际变频控制系统使用需求,根据相关硬件设计规则,对矿井提升机变频控制系统进行硬件设计。矿井提升机变频控制系统硬件设计见图2。

图2 变频控制系统硬件设计
矿井提升机变频控制系统硬件设计是由主回路(上半图)和控制回路(下半图)所组成,见图1。其中,控制回路围绕LPC2131型ARM嵌入式处理器进行矢量运算、处理信号等来实现控制功能的。
2.4 变频控制系统驱动电路
由于IGBT(即绝缘栅双极型晶体管)必须配备具有正方向电压的供电系统、能够及时开关、具有保证整个电路正常运行的电压电流幅值以及良好的抗干扰性能。据此本次设计选用了IR2233型驱动芯片,该型芯片能够满足三相电动机的驱动使用需求,在电路故障或者欠压等异常情况下,能够及时将6个输出端口关闭避免造成事故。矿井提升机变频控制系统驱动电路见图3。
2.5 变频控制系统监测电路
(1)变频控制系统电流监测电路
通过定子电流监测设备可以对整个控制系统的矢量精度进行实时监测控制,即对流经驱动电机的三相定子的电流信号进行监测,并通过处理器AD将电流信号转变为数字信号,进而运用后续处理程序对数字信号进行分析处理。本次设计采用了TBCDS-06型传感器,通过OP07放大器电路对电流信号进行放大收集。矿井提升机变频控制系统电流监测电路设计见图4。
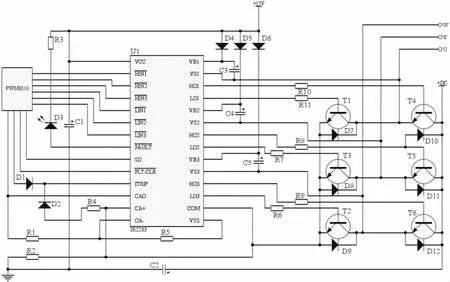
图3 变频控制系统驱动电路
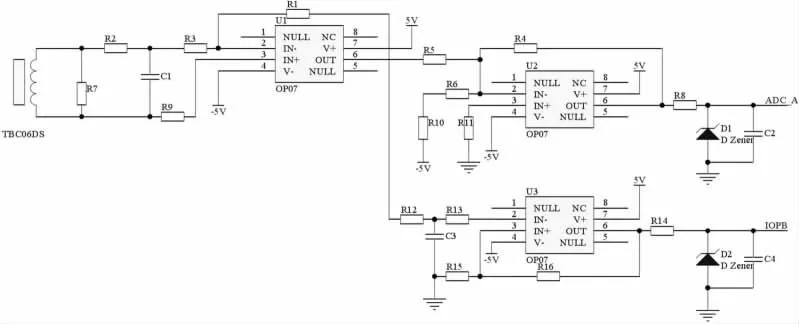
图4 变频控制系统电流监测电路
(2)变频控制系统电压监测电路
通过并联电阻方法可以实现对矿井提升机变频控制系统的电压进行监测,再综合采用分压电阻方法对矿井提升机变频控制系统的输出电压进行监测,矿井提升机变频控制系统电流监测电压电路见图5。
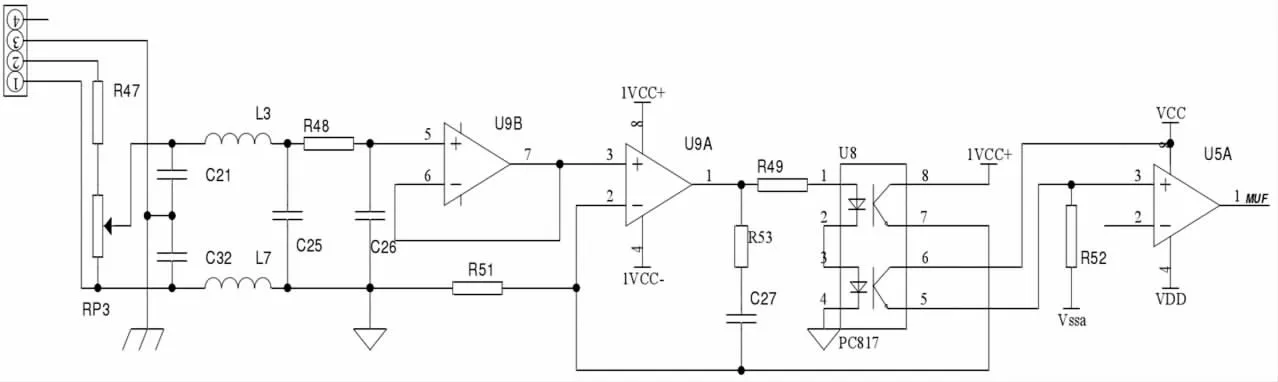
图5 变频控制系统电压监测电路
(3)变频控制系统速度监测电路
通过变频控制系统速度监测电路可以实现对速度闭环和转子磁链进行实时监测,其中将旋转编码器布置于电机转轴上,作为速度监测电路的监测元件,对电机运行当中转轴的角位置和转速进行脉冲编码。本次设计采用了欧姆龙自动化公司生产的E6B2型编码器,对矿井提升机驱动电机的速度进行监测控制,以符合保证矿井提升机安全正常使用的要求。矿井提升机变频控制系统速度监测电路见图6。
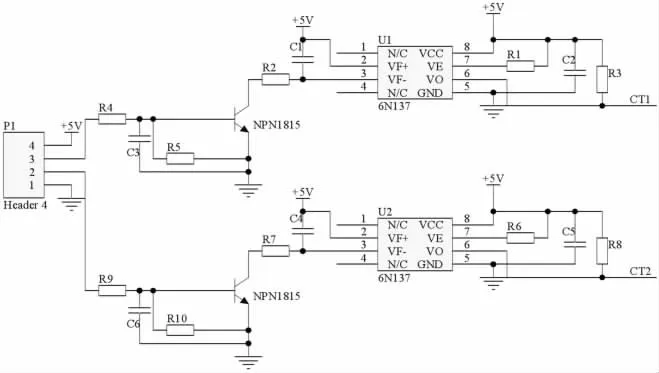
图6 变频控制系统速度监测电路
(4)变频控制系统温度监测电路
通过变频控制系统速度监测电路,可以实现对电路中逆变模块、驱动电机运行时温度的实时监测。本次设计采用了4组LM75型温度传感器,该型温度传感器能够对-55℃~125℃范围内的温度进行实时监测,可以通过通过3.3V的直流电源直接为其进行供电。矿井提升机变频控制系统温度监测电压电路见图7。
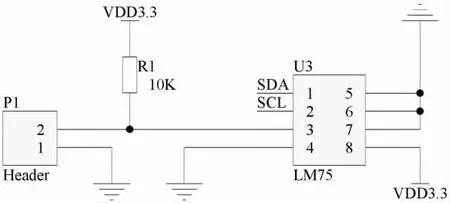
图7 变频控制系统温度监测电路
(5)变频控制系统过流保护电路
将电流霍尔传感器应用到整个电路设计当中,该传感器兼具线性度、完全隔离采集端以及非接触测试等优势。在发生过流现象中,OCURR端则会发生低电平现象,ARM处理器将会相应地发出中断处理信号,进而达到对电路保护的目的。矿井提升机变频控制系统过流保护电路见图8。
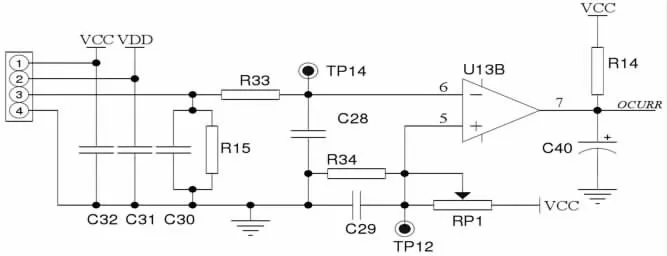
图8 变频控制系统过流保护电路
3 矿井提升机变频调速控制系统软件设计
以矿井提升机控制系统的相关硬件选型和电路设计为基础,还需要进一步对其软件进行设计以更好地实现矿井提升机安全可靠地运行。本次软件设计以矿井提升机实际运行信号采集、参数设置、运行速度、提升行程等各项运行数据,进而对上述运行参数之间的关系进行分析,并通过控制系统对矿井提升机的实际运行速度进行调整。本次矿井提升机软件设计将嵌入式的μC-OS-Ⅱ操作系统应用于LPC2131型ARM嵌入式处理器当中,采用C语言进行编程,将矿井提升机控制系统中实现不同功能的各个模块通过定义成不同任务的方法,且根据所执行任务的重要性将其设置为不同执行顺序。
3.1 软件系统层次划分
矿井提升机变频控制系统软件层次划分为硬件层、操作层和应用层。硬件层为前文所述以LPC2131型ARM嵌入式处理器为平台而搭建的整体硬件,而操作层为μC-OS-Ⅱ操作系统。针对应用层,主要是由信号采集、控制执行以及保护等三个程序实现主要功能的。其中,信号采集程序,主要是完成电流、电压、速度、温度等参数的检测任务。控制执行程序,主要是通过矢量控制和PID等算法完成发送软件系统控制指令的任务。保护程序主要是完成对过流、欠过压、过热等异常运行现象进行报警甚至设备运行急停的任务。上述各个任务之间的参数数据等采用邮箱的方式进行传递。
矿井提升机变频控制系统软件应用层任务划分见图9。
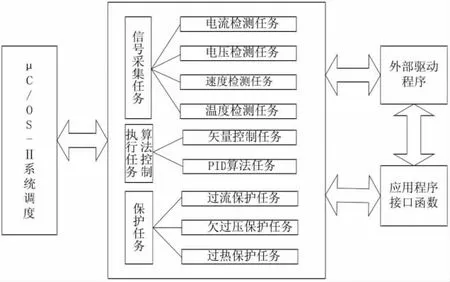
图9 变频控制系统软件应用层任务划分
3.2 软件任务的划分及建立
通过图8可以知,信号采集、控制执行以及保护等三个程序的九项任务,通过μC-OS-Ⅱ操作系统由可以细化成见表1。
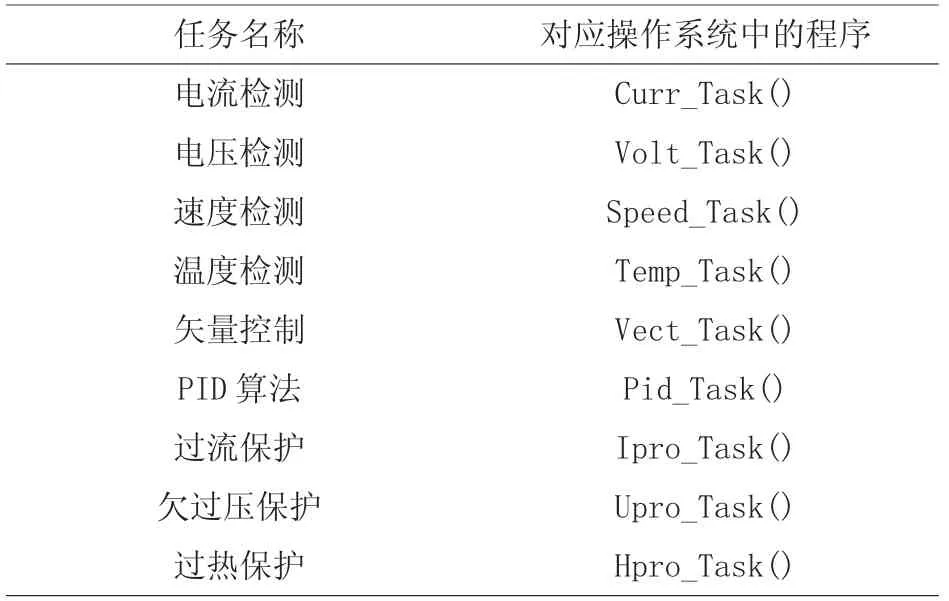
表1 μC-OS-Ⅱ操作系统具体九项任务程序
3.3 过速过卷错向控制
过速过卷错向控制主要是通过矢量控制来实现的,对速度检测任务的模拟量进行矢量控制,以达到对矿井提升机故障进行报警并启动相应安全回路的目的。矿井提升机控制系统矢量控制程序框图见图10。
4 结语
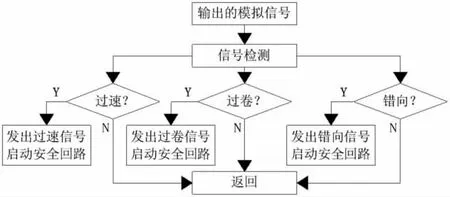
图10 控制系统矢量控制程序框
通过将上述矿井提升机变频调速控制系统应用于东古城煤矿生产实践当中,矿井提升机采用2JK-3.5/20单绳缠绕式提升机,卷筒直径3.5 m,卷筒宽度1.7 m,两个卷筒中心距1840 m,最大静张力112.7 kN,提升速度6.78 m/s;电动机采用Yr800-8/1180型6 kV高压三相交流异步电动机,额定功率800 kW,转速740 r/min;钢丝绳采用Ф=40 mm,6×19右捻镀锌钢丝绳,抗拉强度170.0 kN/m2。现场实际运行状况表明,该套设备能够实现远程实时监测,保证矿井提升机运行的稳定性和可靠性,对于矿井安全高效生产的实现具有积极的现实意义。
猜你喜欢
山东冶金(2022年4期)2022-09-14
电子乐园·上旬刊(2022年5期)2022-04-09
家庭影院技术(2021年7期)2021-08-14
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
电子制作(2019年7期)2019-04-25
铁道通信信号(2018年2期)2018-04-18
电子制作(2017年7期)2017-06-05
中国高新技术企业(2015年13期)2015-04-30
自动化博览(2014年4期)2014-02-28