
基于反步法四旋翼自适应飞行控制器设计∗
2020-03-03 12:24:52洪云飞
舰船电子工程 2020年1期
洪云飞
(西安航空职业技术学院电子工程学院 西安 710089)
1 引言
伴随着无人机行业的飞速发展,无人机的应用范围也在逐渐扩大,不同行业不同领域均引进了各种不同类型不同优势的旋翼机,其中,最广泛使用的是四旋翼飞机。它因其独特的优点而被人在各种不同的场所广泛应用。其结构在设计上也与传统的单旋翼飞机不同,不同之处在于其姿态的变化是通过两对螺旋桨转动的速度的变化来完成的,设定其飞行轨迹时也是通过改变其机身受到的合力[1]。它的优势可以归纳为以下三个方面:
1)结构简单、成本较低,适用范围广泛;
2)质量轻,体积小,运动灵活,可以垂直起降;
3)操作灵活,机动性强,易控制,可迅速调整或控制姿态。
得利于无人机行业的飞速发展,在多机协同、人工智能及机器人等众多领域也迎来了新的发展机遇。在中国,尽管四旋翼飞机技术的研究和开发起步较晚,但目前四旋翼飞机的发展非常迅速,目前已经有很大一部分院校及科研单位对其进行了研究。近年来哈尔滨工业大学已经利用反步法设计了一种四旋翼的控制系统,并开发了相应的控制器,与此同时,搭建了实验平台并进行仿真实验。南京航空航天大学则是在结合动态逆和滑膜控制法的基础上,根据四旋翼无人机自身所具有的复杂的特性对控制器进行设计,此同时搭建实验平台并进行仿真实验[2]。国防科技大学在对四旋翼进行深入研究,建立了一套先进全面的飞行控制系统和精确的姿态的数学模型,对于飞行器机体在空中飞行姿态的控制采用了PID与ADRC等控制方式[3]。
四旋翼飞行器是一种欠驱动和强耦合的非线性系统,其输入和输出不相等[4]。由于四旋翼无人机在机身结构的设计上与传统的结构的设计不尽相同,因此大大地增加系统建模的难度,在这个基础上,就要提高对姿态控制算法的要求以达到系统的稳定运行。确定四旋翼无人机整体性能的决定性因素是姿态控制器的性能[5]。
目前,与国外相比,中国四旋翼无人机控制算法研究还存在较大差距。现有的创新算法并不多,并不能达到很好的控制效果。与此同时,存在不够稳定的情况,对外界干扰的抵抗能力也不够强[5]。因此,通过不断促进对四旋翼飞行器在有效的控制算法、较为精确的姿态数学模型的推导以及姿态的控制系统设计等方面的创新性研究,可以使其运行稳定、准确地按照设定的轨迹运行。
目前,反步法作为一种在非线性系统中被普遍而广泛适用的控制方法,它的优势在于进行在线控制的时候,可以在很大的程度上减少计算的时间[6]。使用反步法设计四旋翼系统时,核心思想是将复杂系统划分成为多个子系统,且子系统数量不大于整个系统的阶数。在对控制器进行设计时,每个子系统的中间虚拟控制变量及Lyapunov函数应该递归构造[7]。它不仅适用于非线性系统,而且适用于线性系统。基于反步法的飞行姿态的控制算法可以在很大程度上解决由于非线性因素或不确定因素引起的一些影响。
用自适应控制方法进行的研究的对象一般是不确定性的,因其是一种通过自动地调节控制器参数来满足性能要求的自动控制系统[8]。与其他的控制方案相比,其最大的优点在于对外部干扰及系统模型的依赖性最小[9]。在对模型进行改进的过程中,动态改进其控制效果,使其具有自适应能力。
根据反步法的设计思想,本文满足严格反馈的形式,划分了四旋翼飞行控制系统。飞控系统被分为三个二阶姿态角控制和三个二阶位置控制的子系统,并设计了与相应的控制器。最后通过对相应的自适应律的融合,再结合外部的干扰因素,利用Simulink建模工具来建立相关仿真模型并进行相关验证分析。
2 建立四旋翼飞机动力学模型
2.1 平移运动方程
在E系,四旋翼无人机的平移运动方程由牛顿定律写成[10]:

其中,设四旋翼所受到的合力为F;设四旋翼飞行器在旋转过程中产生的总张力为FT;设四旋翼受到的重力为FG;设四旋翼受到的空气阻力为Ff;设四旋翼自身的机体重量为m。
如果假设四旋翼所受的重力是一直保持不变的,也就是要在飞行过程中对不同因素造成的四旋翼的重量损失忽略不计。在E系下,由于四旋翼重力方向一直垂直往下,因此,可以写成:

在实际飞行过程中,为了保证四旋翼飞行器能够垂直起飞,螺旋桨在转动的时候需要拥有足够的浆距以及升力。因此假设电动机的推力与其转速成正比,在旋翼机旋翼尺寸不变的情况下,旋翼在旋转时会产生与机体表面相垂直向上的升力,这时旋翼机所受到的向上的升力可以写成:

其中,U1表示旋翼机所受到的升力,kt表示升力系数,ωi表示第i个电动机转动的角速度。在E系下,四旋翼总升力可以用以下变换矩阵表示:
由于四旋翼在飞行过程中的空气阻力与其飞行的速度成正比例,因此在E系下,它接收的空气阻力可表示为

这里,分别使用kx、ky与kz来表示四旋翼在X轴、Y轴与Z轴接收的空气阻力的系数。
将式(2)、(4)与(5)代入到方程(1),得到外力平衡方程:

其中,(x,y,z)表示机体在E系下所在位置的向量。
因此,可以推断出在地理坐标系中,其运动方程式:

2.2 旋转运动方程
在B系中,当四旋翼飞行器在飞行过程中受到的力矩不平衡时,则四旋翼的机体便会发生旋转。
此时,如果我们假设该无人机的质量分布是均匀的并且结构是对称的,则机身旋转的惯性矩阵可以写成:
B系中,Ix表示X轴转动惯量,Iy表示Y轴转动惯量,Iz表示Z轴转动惯量,三者都是常数。
因此,该飞行器对自身重力的角惯量可表示为

由角动量定理,其旋转动力学方程为
其中,M表示四旋翼自身受到的合成力矩。
三个主轴的单位矢量与四旋翼的转速之可表示为

将式(11)带入到式(10)可以得到:

在机体坐标系中,ωx、ωy、ωz分别表示相对X轴、Y轴、Z轴的转动角速度。
将式(13)引入到式(12),在B系中,可以得到角动量定理的表达式:

四旋翼的转动角速度与它对自身重心的角动量及其各轴的转动惯量之间的关系可以表示为

将式(15)带入到式(14),可以得到
定义U2为横滚角的控制量;定义U3为俯仰角的控制量;定义U4为偏航角的控制量。其表达式即为

其中,kd表示电动机的反转矩比例系数。
如果忽略飞行过程中的陀螺效应以及空气阻力对四旋翼飞行器的影响,由式(16)、(17)得,该飞行器的旋转运动方程:
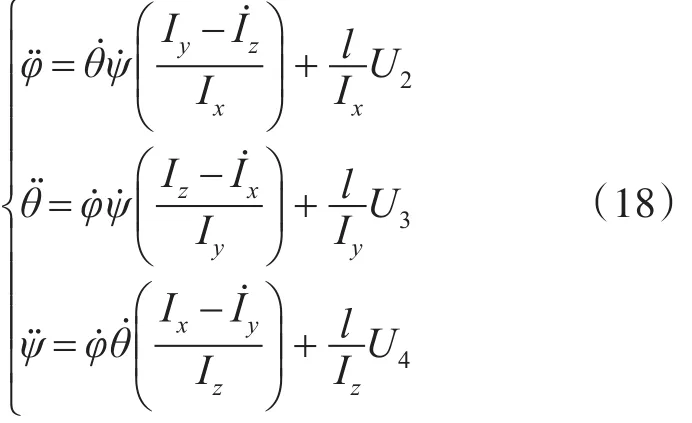
其中,l代表机体的中心与旋桨中心之间的距离。
3 反步自适应控制器设计
3.1 反步控制器设计
四旋翼的状态方程为
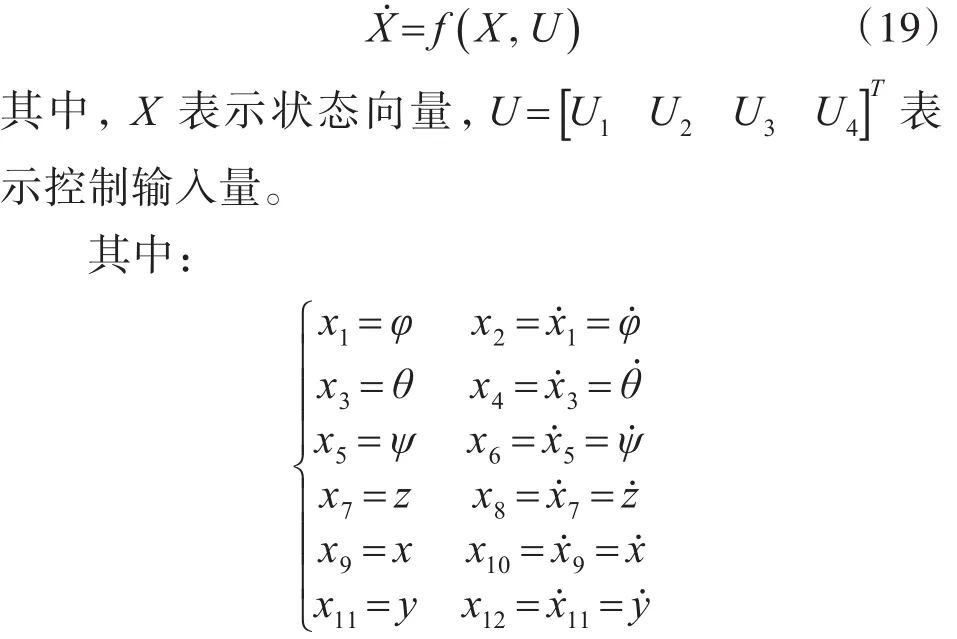
因此,可以将其状态方程写成:
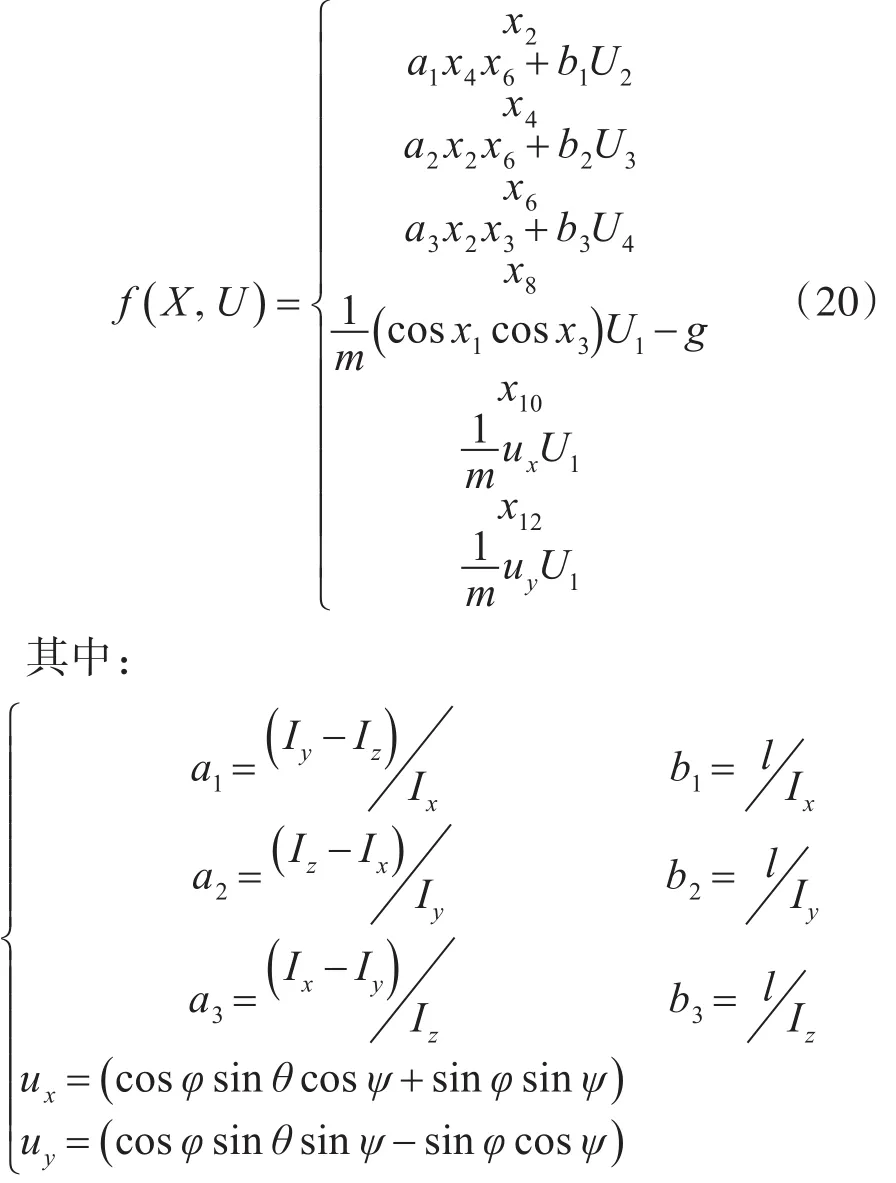
ux与uy分别代表X轴与Y轴各轴向线位移的虚拟控制量[11]。根据式(20)可以推算出,三个轴向线位移的控制与对三个姿态角的控制没有关系,而对三个姿态角的控制间接控制了三个轴的线位移,因此,可以利用反解法计算出翻滚角对Y轴和俯仰角对X轴的线位移量[11]。
当使用反步法进行设计控制器时,即就是使用逆递归的方法来构造出所需的Lyapunov函数与中间控制量。这样讲复杂且不易实现的总系统拆分为多个子系统。最后,使用递归方法建造Lyapunov函数和各个子系统的中间虚拟控制量,设计出各子系统控制器[12]。
基于反步法,建立飞行器姿态数学模型,对飞行器的位置控制器和姿态角控制器进行设计,其控制系统的结构图如图1所示。
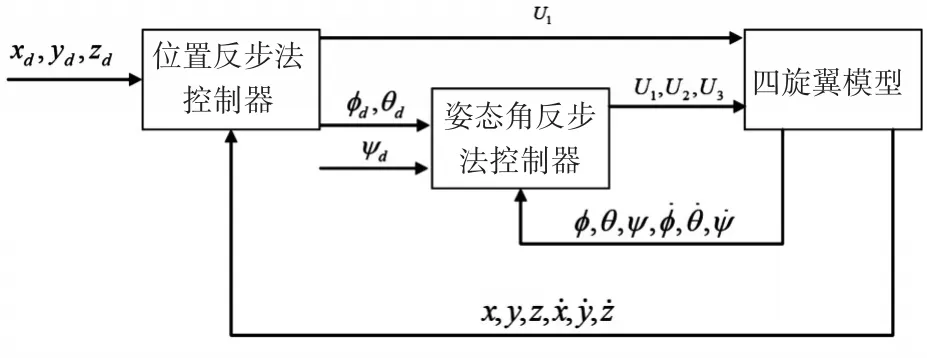
图1 基于反步法的四旋翼控制系统的结构图
3.2 基于反步法自适应的控制器设计
1)姿态角控制回路自适应的控制器设计
假设横滚角 Xd1=ϕd,则其通道误差值是e1=xd1-x1,e˙1=x˙d1-x˙1=x˙d1-x2。根据 Lyapunov 的相关理论,在点e1=0处满足ϕ=ϕd时,选择一个正定的Lyapunov函数:
其中,r1为大于0的常数。
因此构造出的Lyapunov函数可以表示为其中,T1为未知的常量,所以用估计值Tˆ1替代,则可以将误差变量定义为ε=T1-Tˆ1,那么U2可以表示为

根据Lyapunov稳定性理论,该系统逐渐稳定。得到横滚角通道的控制量表示为

同理,设俯仰通道的跟踪误差为e3,设速度误差为e4,设控制参数为r3与r4,并且这四个数据是大于0的常数,并且T2参数的估计值的自适应律是Tˆ2=λ2e4。即可推算出俯仰通道的控制量为

将俯仰通道的跟踪误差定义为e5,将速度误差定义为e6,将控制参数定义为r5与r6,并且这四个数据是大于0的常数,并且T3参数的估计值的自适应律是Tˆ3=λ3e6。可以计算出俯仰通道的控制量:

2)高度控制回路自适应的控制器设计
基于反步法的高度回路的控制器的设计过程如下。
其高度位置的状态方程为

设置所需高度 Xd7=Zd,其通道误差为e7=xd7-x7。由Lyapunov的相关理论,在点e7=0处满足Z=Zd时,选择一个正定的Lyapunov函数

其中,r7为大于0的常数。
因此构造出的二阶Lyapunov函数可以表示为

因此算出高度通道的控制量为

其中,T4为未知的常量,所以用估计值Tˆ4替代,则可以将误差变量定义为ε4=T4-Tˆ4,那么U1可以表示为

根据Lyapunov稳定性理论,该系统逐渐稳定。所以最后我们可以将高度通道的控制量表示为

使用反步方法分别得到平面的X与Y通道的控制量为
其中 r9、r10、r11、r12均为大于0的常数。
4 系统仿真分析
利用Simulink仿真工具,根据本文中利用反步自适应设计的通道U1,U2,U3,U4的控制量,建立其四旋翼飞行器的系统仿真图,仿真框图与反步法是相同的,所以在进行仿真实验时,可以通过反步自适应方程代替控制量来验证控制器的性能。
在E系中,将该飞行器的初始状态设定在原点(0,0,0),当飞行器飞行到预定的航点(1,1,1)时,设四个输入信号均为阶跃信号,设三个姿态角的初始值为0,设偏航角的信号终值为0,设三个轴向位移输入信号的终值为1。本文设计的反步自适应控制器的十六个参数选取:

设定采样的时间为t=20s。通过Simulink进行仿真后得到反步自适应法在Z轴、X轴、Y轴的响应结果如图2~图4所示。
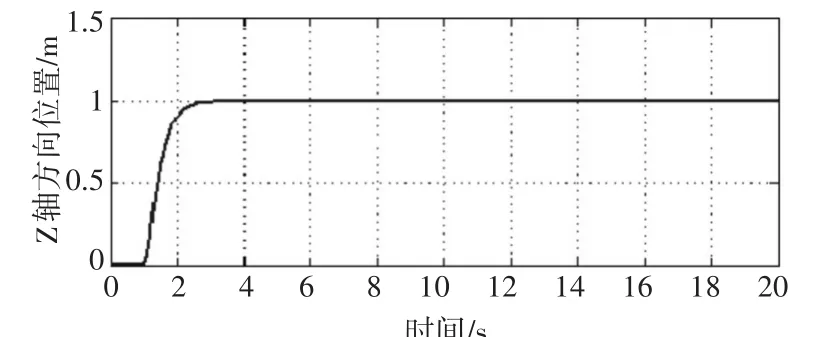
图2 Z轴方向的阶跃响应曲线
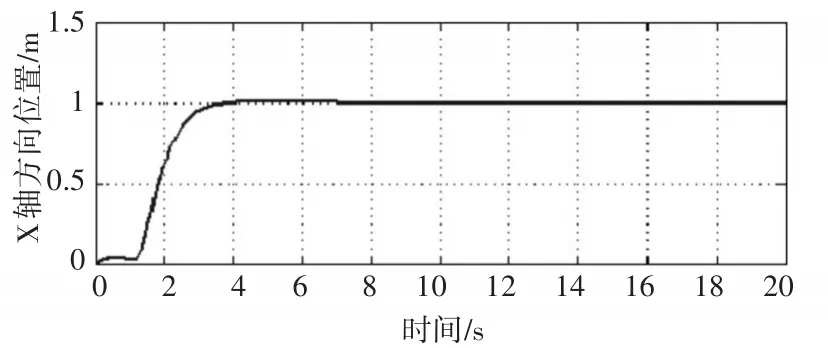
图3 X轴方向的阶跃响应曲线

图4 Y轴方向的阶跃响应曲线
图2 、3和4显示了在系统的阶跃响应期间,位置控制器在X轴、Y轴与Z轴三个方向位置输出的曲线,从图2、3与图4中可以得出,输出响应在一开始在X轴向与Y轴向稍微超调,且偏差值保持在0.04以内,并且分别在5s与4s之内到达稳定的状态,并且没有出现超调的现象。与反步法相比,这种响应的速度较快,并且拥有较高的稳定性。
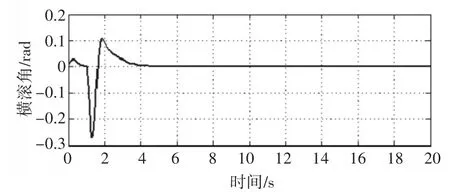
图5 横滚角的响应曲线

图6 俯仰角响应曲线
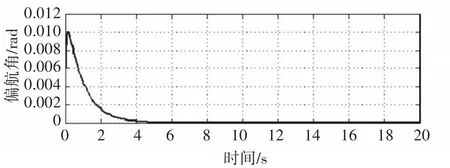
图7 偏航角的响应曲线
图5 、图6与图6表示在系统阶跃响应的过程中,三个轴方向的姿态角输出的曲线伴随着三个轴向位移的输出响应速度的加快,姿态角(滚转角和俯仰角)的变换略微有些加大,此时航偏角的最大偏差仅为0.0004,并且三个姿态角的终值都稳定在零状态。其更高的精确度,姿态角对位置回路较强控制的特点要优于反步法。
5 结语
在分析四旋翼姿态模型的基础上,第一步是设计一种基于四旋翼无人机的控制系统。详尽介绍了其原理,设计的思想和自身结构。采用姿态角逆解法设计双回路控制结构,考虑到未知干扰的存在,根据要求对每一干扰项设计自适应律,结合反步法,对四旋翼模型不断改进,构造了一种基于反步法的反步自适应控制器。最后,通过跟踪姿态来执行模拟实验,表明所设计的控制器是正确有效的。
猜你喜欢
黑龙江大学自然科学学报(2021年4期)2021-11-19 07:05:06
北京航空航天大学学报(2021年9期)2021-11-02 08:24:16
军民两用技术与产品(2021年9期)2021-03-09 05:45:28
电子制作(2019年9期)2019-05-30 09:41:48
天津教育·下(2018年9期)2018-07-13 08:25:47
北京航空航天大学学报(2016年8期)2016-11-16 01:51:09
少儿美术·书法版(2016年6期)2016-02-06 01:10:22
少儿美术·书法版(2016年5期)2016-02-06 01:00:28
少儿美术·书法版(2016年3期)2016-02-06 01:00:02
学习月刊(2015年23期)2015-02-26 06:55:32
