
自动全方位扫码装置的设计
2020-03-02 01:15江浩周珣朱静郭清
科技创新导报 2020年23期
江浩 周珣 朱静 郭清
摘 要:随着网络商务和网上购物的迅速发展,很多行业对于快递业的要求越来越高。目前,在快递分配的环节中,有一项重要的步骤就是扫码分拣。这个步骤通常由人力完成,因此耗时耗力。如果将这个环节改变成全自动的模式,那将有效缩短快递分拣的速度,节省人力,提高扫码分拣的精准性,从而提高快递公司分配货物的效率。本文基于单片机控制电机前后移动及旋转的原理,来实现自动全方位扫码。
关键词:全方位扫码 步进电机 单片机 设计
中图分类号:TP273 文献标识码:A 文章编号:1674-098X(2020)08(b)-0064-03
Abstract: With the rapid development of online commerce and online shopping, many industries have increasingly higher requirements for the express delivery industry. At present, in the process of express distribution, an important step is to scan and sort. This step is usually done by manpower, so it takes time and effort. If this link is changed to a fully automatic mode, it will effectively shorten the speed of express sorting, save manpower, improve the accuracy of scanning and sorting, and thus improve the efficiency of express companies to distribute goods. Based on the principle of single-chip microcomputer to control the movement and rotation of the motor, this paper realizes the automatic omni-directional code scanning.
Key Words: Omnidirectional scanning code; Stepper motor; Single chip microcomputer; Design
日益龐大的物流配送工作对快递公司的工作效率提出了更高的要求。现代物流配送的关键环节,就是快递的分拣作业,一个强大的分拣系统体现一家快递公司的竞争实力,分拣系统的发展仍在继续。近年,随着二维码的普及,快递行业也运用扫码来达到分拣效果,大部分快递公司都采用扫码分拣的形式对快递进行定位、分拣,但快递公司内常见的扫码器为手持扫码器,这种扫码器需要人工手持进行扫码工作,且需要分拣员将每个快递贴有条码一面放置上侧以供扫码。这容易导致漏扫、底部难以扫描的问题,对于快递公司而言,影响整体运输效率;对于快递分拣员而言,工作量大、易发生纰漏,导致快递运输的时间增加。所以快递行业发展的趋势必定是自动化、智能化,这不仅节省人力资源,更能提高公司的整体效益。因此,研究快递分拣的全方位化、自动化对快递行业的发展具有推动意义。
1 自动全方位扫码装置的基本结构
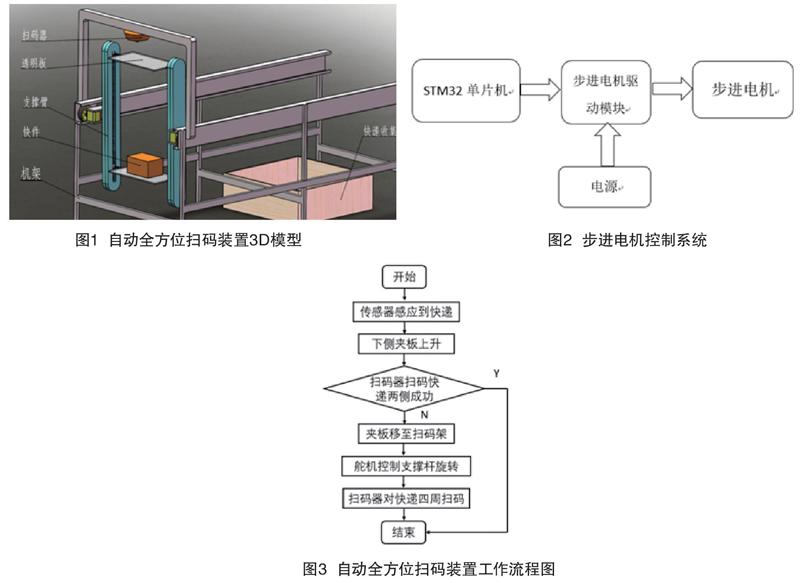
本文设计一种可移动旋转的自动全方位扫码装置如图1所示。该装置包括支撑架体,还包括带感应器的透明夹板、支撑臂、舵机和导轮,带感应器的透明夹板包括上层透明架板和下层透明夹板,支撑架体的下方设有快递堆放框,支撑架体的两侧设有行走机构,路径机构为槽型轨道,透明夹板的两侧分别设有支撑臂,并由舵机控制支撑臂实现360度旋转,支撑臂内置电机和丝杆,电机控制丝杆实现透明夹板上升下降,舵机与设在行走机构上的导轮相连,从而使得透明夹板沿着行走机构实现水平快速移动,其中透明夹板的两侧与两侧的支撑臂之间分别设有内置扫码器。
快递自由落体至下侧透明夹板的过程中,透明夹板感应后传输信号,并通过夹板两侧支撑臂内置电机控制丝杆调节下侧透明夹板上升位移,上侧夹板固定不动,从而实现夹紧快件。与此同时,夹板上升过程中,支撑臂内置扫码器对快件两侧进行扫码,而后夹板由导轮带动移动至扫码架处,由舵机控制支撑杆360度旋转,使扫码架上的扫码器对快件进行四面扫实现自动全方位扫码,从而节约人力成本并提高工作效率。
2 自动全方位扫码装置的传动装置
自动全方位扫码装置的传动装置主要步进电机控制系统、丝杆和夹板,扫码器与舵机构成等部分组成。步进电机控制系统如图2所示,主要由单片机、驱动模块、步进电机和电源组成。
步进电机的驱动电路是由脉冲信号来控制的(脉冲信号一般由单片机或CPU产生)。[1]每当步进驱动器接收到一个脉冲信号,步进电机就按设定的方向转动一个步距角,改变步进电机的转速可以调节脉冲信号的频率。步进电机在CPU控制下,按工作程序实现一定角度的旋转和调速[2]。
电机与丝杆放置于透明夹板两侧的支撑臂内,可实现控制下方透明夹板上移,上方透明板固定。在透明板上设置压力传感器,从而实现夹紧快件的目的。丝杆中间空隙处设置扫码装置,可以对箱体快件若贴在两侧支撑臂方向的条形码进行扫码。
板夹的夹持材料采用亚克力板,其极强的透光率适合扫码;其较好的塑性,可以容许两侧步进电机间的轻微不同步;而其一定的硬度,可以夹持快递。
舵机连接在支撑臂外侧,在夹板行至扫码架时,控制整个支撑臂进行360度旋转运动,配合扫码架进行扫码。舵机的控制系统由单片机、数字舵机、支撑臂和电源模块组成。
扫码架的材料为铝型材,方便安装。扫码器为条码阅读器,采用固像式扫码器,其读取率在所有类型的条码阅读器中最高,安装灵活。固像式条码阅读器的扫码范围也很广阔,大视野、大景深,通过该种型号扫码器,本项目上的快件完全可以被扫描到。
行走机构由滚轮与槽型轨道构成以带动支撑臂在导轨上进行前后移动。滚轮由马达驱动,使其有在轨道中向前向后运动的力。驱动采用四驱直流电机,由L298N与单片机联合控制,能够实现速度的调节与前后移动[3]。
3 自动全方位扫码装置的软件设计
控制系统采用STM32核心开发板,由STM32控制电机工作,各电机配有相应电源及驱动模块,在电机接收到STM32命令时,便会做出响应驱动响应的器件开始工作,自动全方位扫码装置的工作流程图如图3所示。
4 结语
本文研究设计的自动全方位扫码装置由单片机控制电机来驱动器件工作从而实现自动夹持、旋转移动快递和全方位扫码的功能。该装置只能实现全方位扫码,在快递分拣系统中只是一个小部分。因此,以后想改进该装置,将扫码和分拣相连接,使其能融入整个分拣系统。初步想法是通过连接传送带将快递送至透明板,并设计好扫码之后的分拣流程,根据扫码结果确定快递流向,并将其分拣到对应区域,完善扫码分拣系统的自动化程度。
参考文献
[1] 郝传柱.人工智能技术在自动化控制系统中的应用研究[J].现代交际,2019(19):254-255.
[2] 何波.电子工程自动化控制中智能技术应用研究[J].电子元器件与信息技术,2019,3(6):70-73.
[3] 谢正刚.步进电机的自动化控制探究[J].企业导报,2015(11):192,109.
[4] 杜春宽,江凌云,陈国美.基于TRIZ理论的自动分拣快件装置的设计与研究[J/OL].内蒙古农业大学学报(自然科学版):1-6[2020-07-03].https://doi.org/10.16853/j.cnki.1009-3575.2020.04.010.
[5] 胡彩霞,劉璐,宋伟伟.基于PLC的货物定位控制系统设计[J].电子测试,2020(11):37-39.
[6] 刘忠强,张立,张春晓,等.双轴步进电机驱动控制系统设计[J].自动化与仪表,2019,34(8):29-33.
猜你喜欢
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年9期)2019-05-30
艺术启蒙(2018年7期)2018-08-23
海峡姐妹(2017年7期)2017-07-31
Coco薇(2017年5期)2017-06-05
电子设计工程(2015年15期)2015-02-27
舒适广告(2008年9期)2008-09-22
