
基于单片机的管道机器人控制系统的设计
2020-03-02 01:14朱思腾杨洋荆玺霖钱宁波吴东升
科技创新导报 2020年21期
朱思腾 杨洋 荆玺霖 钱宁波 吴东升


摘 要:设计制造一台管道自动检测与修复机器人。采用STM32单片机作为机器人的主控。设计基于角度外环和转速内环的双环PID控制器,通过PWM控制技术调速,构成两轴云台的直流电机闭环控制系统。基于OPENMV摄像头的边缘检测技术,识别管道内壁腐蚀区域的特征轮廓。通过两轴云台转动,自动瞄准管道内壁的腐蚀区域,喷洒涂料修复该区域。机器人利用WIFI无线传输技术将管道内部的图像传输到上位机,基于2.4G无线通信技术,实现采用遥控器进行远程操作。经过多次测试,样机的实验结果表明:机器人具有良好的稳定性和可控性,并能够对管道进行自动检测和修复。
关键词:管道检测与修复机器人 两轴云台控制系统 STM32单片机 PID控制
中图分类号:TP242.6 文献标识码:A 文章编号:1674-098X(2020)07(c)-0001-03
Abstract: A pipeline robot was designed for detection and repair. The STM32 single chip processor was used as the main controller. The double loop PID controller was designed based on the outer angle-loop and the inner speed-loop, and the speed is adjusted by the PWM controller to form the DC motor closed-loop control system of the two-axis platform. The OPENMV camera, with the edge detection technology, was used to identify the corrosion characteristic on the inner wall of the pipeline. The corrosion areas of the inner wall of the pipeline were automatically scanned by rotating the two-axis platform, and then were repaired by spraying paint. The images on the pipeline were transmitted to the upper computer by the robot with the WiFi wireless transmission technology. The remote control was operated for remote operation by the 2.4G wireless communication technology. The experimental results of the prototype show that the robot has good stability and controllability, and can automatically detect and repair the pipeline.
Key Words: Pipeline robot for detection and repair;Controlling system with the two-axis platform;STM32 single chip processor;PID controller
管道運输是用管道作为传输工具的一种长距离输送液体和气体物资的运输方式,是五大运输方式之一。随着国内经济的快速发展,到2017年初,长输油气管道总里程已经达到11.7×104km[1]。2017年,国家发展改革委、国家能源局发布《中长期油气管网规划》,国内又迎来新一轮管道建设高峰,油气管的规模不断扩大[2]。但管道在使用过程中,由于管壁的腐蚀、人为损坏和自然灾害等原因,容易造成泄露事故,不仅给国民经济带来重要损失,更会带来巨大的社会危害。因此管道检测和修复是关系到管道的可靠性以及提高其使用寿命的重要因素。
传统的管道检测使用全面挖掘法和随机抽样法,这两种方法工作量大、效率低。另外,由于传输管道的特殊环境,绝大部分管道的内壁很难检测和修复,因此有必要设计和制造一种管道检测与修复的机器人,凭借其良好的性能代替工人到管道内部进行作业,既能高效完成检测和修复的任务,又能避免人员受到伤害。
1 机器人控制系统
管道机器人具有自动检测模式和手动操作模式,自动检测模式具有高效、无人的优点。但考虑到机器人需要一定的容错率,增加了手动操作模式,使机器人更具有实用性。
自动检测模式是基于定位技术的控制算法,实现机器人在管道内部的自主移动,通过激光测距模块检测机器人与管壁两侧的距离,解算出管内行走的最优路线,通过底盘MPU6050模块检测机器人底盘在x-y平面偏移的角度,控制机器人在管内的直行和转向,实现机器人自动行走。通过设计一个两轴云台,使其与机器人底盘连接,用于放置喷涂装置和摄像头。然后通过云台MPU6050模块实时检测两轴云台在PITCH轴、YAW轴运动的角度和角速度,实现对云台电机的稳定控制。基于OPENMV摄像头的边缘检测技术,识别管道内壁腐蚀区域特征轮廓,通过两轴云台的转动自动瞄准管道内壁腐蚀区域,喷洒涂料,实现机器人的自动检测与修复功能。
手动操作模式基于2.4G无线通信技术,实现遥控器对机器人的远程自由操控。同时基于WIFI通信技术实时将管道内部图像传输到上位机,实现基于物联网技术的人机交互。
1.1 硬件连接系统结构
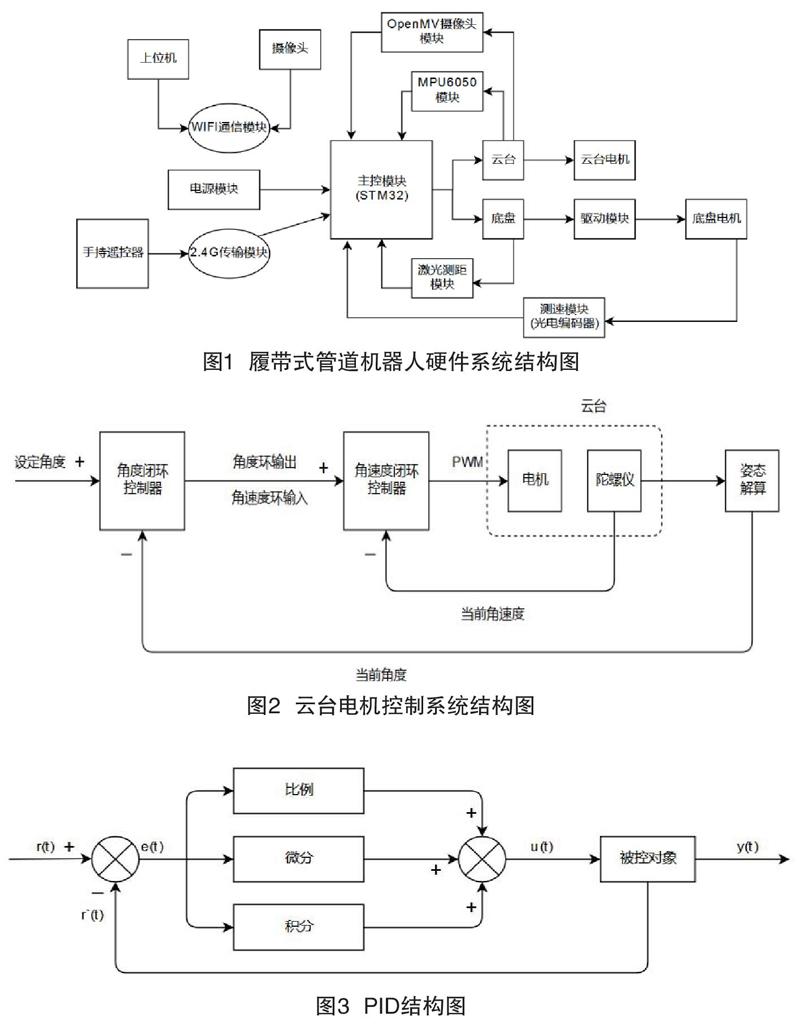
管道机器人控制系统结构如图1所示。控制系统以主控模块为核心,进行输入和输出操作。主控模块接受遥控器发送的数据,基于WIFI和2.4G无线传输技术,采用上位机和遥控器联合控制的方式,实现对管道机器人的远程遥控。主控模块分别控制机器人的底盘和云台。对于底盘,激光测距模块实时检测机器人底盘左右两侧与管道内壁的距离,反馈数据给主控模块,主控模块基于定位模块的控制算法,解算出机器人在管道内部的最优路径,通过对电机的闭环控制,实现机器人在管道内的自动行走;对于云台,MPU6050模块实时检测云台在空间上的转动,并反馈数据给主控模块,主控模块基于PID控制算法,实现闭环控制云台电机的转动。OPENMV模块实时检测管道内壁,并计算腐蚀区域坐标,反馈数据给主控模块,通过控制云台的转动,自动瞄准腐蚀区,控制喷涂装置喷洒颜料,实现机器人对管道内壁的自动检测和修复。
1.2 控制程序设计方案
采用C语言编程,KEIL5作为编译器,将C语言转化成芯片可接受的二进制码。通过JILINK仿真器,下载到芯片程序存储器,实现机器人的可编程控制。机器人控制程序,采用定时器计时的方式,以1ms为周期循环执行控制逻辑,运用PWM控制技术对电机速度进行控制,设置定时器的编码器模式对光电编码器发送的脉冲进行计数,开通了多组DMA中断,利用DMA通道采集数据,运用多组PID控制器,实现闭环控制。
2 云台电机控制系统
伺服控制系统方式可分为开环、半闭环和全闭环,闭环控制系统更具稳定性和快速响应性,相比于单闭环控制系统,双闭环控制系统具有更好的抗扰动性。由于云台需要极高的稳定性,电机启动的超调量小[3],为了保证系统的稳、准、快,直流调速系统普遍采用双闭环控制方式[4],其结构如图2所示。
控制器采用角度外环、加速度内环的双闭环PID控制器。对于角度闭环控制器,输入值为设定角度,对陀螺仪进行姿态解算后得到的角度值作为真实值,输出值传递给角速度环。对于角速度闭环控制器,输入值为角度环的输出,真实值为陀螺仪反馈的数据,输出值通过PWM控制技术,实现对电机进行控制。基于双闭环PID串级控制,设计云台电机控制系统,云台作为喷涂装置和摄像头模块的载体,云台系统的稳定性实现了机器人在自动检测和修复过程中的稳定运动。
3 经典PID控制器
3.1 原理介绍
比例积分微分控制,简称PID控制,是最早发展起来的控制策略之一,其算法简单、可靠性高,PID控制系统原理图如图3所示。根据给定值和实际输出值构成控制偏差,将偏差按比例、积分和微分通过线性组合构成控制量,对被控对象进行控制。
图3中,r(t):PID控制器设定值如下。
r'(t):系统的实际值;
e(t):设定值与实际值构成控制偏差值(e(t)=r(t)-y(t))
u(t):PID控制器输出值
y(t):系统的实际输出值
软件模拟PID控制器的控制规律为:
式中,KP:控制器的比例系数;Ti:控制器的积分时间;Td:控制器的微分时间;P-比例环节,比例环节是对偏差瞬间做出反应,使控制量向减少偏差的方向变化;I-积分环节,积分环节是对偏差进行累计计算,消除系统的偏差;D-微分环节,微分环节是根据偏差的变化趋势预先给出适当的纠正,阻止偏差变化。
PID控制算法可以分为位置式PID和增量式PID控制算法[5]。位置式PID控制算法的输出与整个过去的状态有关,用到了误差的累加值,而增量式PID的输出只与当前值和前两次值的误差有关,考虑到执行机构不带积分部件,所以选用位置式PID控制算法。由于是运用在单片机上,需要将公式进行离散化处理。位置式PID控制算法经离散化处理后的公式为:
3.2 PID参数调节
应用PID控制最重要的步骤就是进行PID参数的选取和调整,通过对PID控制器参数的整定,使得系统满足一定的标称性能和期望的输出状态[6]。
对于比例环节。控制作用的强弱取决于比例系数KP。比例系数KP越大,控制作用越强,则过渡过程越快,控制过程的静态偏差也就越小;但是KP越大,也越容易产生振荡,破坏系统的稳定性。
积分环节的调节作用虽然会消除静态误差,但也会降低系统的响应速度,增加系统的超调量。积分常数越小,积分的积累作用越弱,这时系统在过渡时不会产生振荡;但是减小积分常数会减慢静态误差的消除过程,消除偏差所需的时间也较长,但可以减少超调量,提高系统的稳定性。
微分环节的作用是阻止偏差的变化,根据偏差的变化趋势进行控制,偏差变化得越快,微分控制器的输出就越大,能在偏差值变大之前进行修正。微分作用的引入,将有助于减小超调量,克服振荡,使系统趋于稳定,加快了系统的跟踪速度。
4 结语
自主研发了基于STM32单片机控制,可实现智能检测和远程遥控的履带式管道机器人。基于激光测距技术,通过定位控制算法,解算出最优路径,实现了机器人在管道内的自动行走。基于OPENMV模块的边缘检测技术,实现了機器人对管道内壁腐蚀区域的自动检测。云台作为摄像头模块和喷涂装置的载体,基于经典PID算法,设计角度和角速度为反馈量的双闭环云台控制系统,实现了云台的稳定、可控。通过云台的运动自动瞄准腐蚀区域,控制喷涂装置进行喷涂工作,实现了机器人对管道内壁的自动修复。经过理论分析和实验测试,基本实现了对管道内部的自动检测和修复。
参考文献
[1] 祝悫智,吴超,李秋扬,等.全球油气管道发展现状及未来趋势[J].油气储运,2017,36(4):375-380.
[2] 李秋扬,赵明华,任学军,等.中国油气管道建设现状及发展趋势[J].油气田地面工程,2019,38(S1):14-17.
[3] 顾亭亭,张明霞.浅析直流电机双闭环调速系统的设计[J].机电信息,2019(5):28-29.
[4] 朱贤勇,万晓慧.双闭环直流调速系统优化设计与Matlab验证[J].内燃机与配件,2018(20):45-48.
[5] 王祎晨.增量式PID和位置式PID算法的整定比较与研究[J].工业控制计算机,2018,31(5):123-124.
[6] 叶政.PID控制器参数整定方法研究及其应用[D].北京:北京邮电大学,2016.
猜你喜欢
山东工业技术(2016年23期)2016-12-23
科学与财富(2016年26期)2016-12-01
