
基于HSV颜色模型的堆外核探测器自动对接技术研究
2020-03-02 05:25梅菠萍贺欣张正钢
工程技术与管理 2020年15期
梅菠萍 贺欣 张正钢
1.西南科技大学信息工程学院,中国·四川 绵阳 621000
2.特殊环境机器人技术四川重点实验室,中国·四川 绵阳 621000
1 引言
核能发电是一种高效、清洁的能源获取方式,也是未来世界能源危机有效的解决途径之一。由于核能燃料的高放射性以及对人体的高伤害性,核电设施的安全监测、维护是核能开发的关键环节。堆外核测仪表系统通过从反应堆堆芯泄漏中子注量率监测反应堆功率、变化水平及其分布,是反应堆保护系统和核电厂区控制系统的重要依据。而堆外核测探测器是核测仪表系统传感器的重要组成部分,布置在反应堆压力容器外围,直接采集环境中堆芯泄漏的中子注量率水平。目前,堆腔底部核测探测器的安装主要依靠人工方式,停堆24h 后,由维修人员直接进入堆腔进行拆卸与安装等操作。由于腔体狭窄,操作工序繁琐复杂,长时高剂量辐照,对维修人员人身安全构成极大威胁。因此开发一种核测探测设备的自动安装对接技术对提高设备安装效率与安全性都具有重要的意义。
如图1中所示,堆外核测探测器主要分为两级探测设备,通过螺丝孔位固定。探测器的自动对接安装工艺的关键环节为探测器两级的对准,确保上下螺丝孔位对齐安装。随着抗辐加固技术的飞速发展,辐射场景的视觉感知技术取得飞速进展。常规环境中的机器视觉技术、计算机视觉技术以及视觉伺服系统逐步被应用于核辐射场景。张福梅[1]提出一种基于机器视觉检测的装配工艺方法,实现伺服阀微小结构精密装配;刘传义[2]提出一种基于双向机器视觉的非透明模板副对准控制方法,实现基于视觉的工件精确定位;张锡福[3]针对彩色印刷的套印对准问题,提出一种基于机器视觉的套印误差检测方法。
针对某示范工程项目核能发电场景,论文提出一种基于HSV 颜色模型的堆外核测探测器自动对接方法。通过两级探测器上的预设标识符的分割确定探测器两级的位置并计算需要转动的最小对接角度。通过实验证明,论文提出的方法能适应全天候、噪声影响的探测器自动对接需求,并应用于实际核电核测仪表系统。
2 系统组成
如图1(a)所示,堆外核测探测器两级设备的外径为204 mm,探测器端口处一周均匀分布六个螺孔,两节探测器通过六个固定插销连接,固定插销杆长度248mm,外径25.4mm,螺帽为M12。如图1(b)所示,图像采集设备安装于距离探测器120mm 处,相机光轴与探测器圆柱中轴线保持垂直。相机采用大华A5201M/CG50 相机,固定焦距为6mm,相机分辨率为1920×1200,像元尺寸为4.8µm×4.8µm,在距离120mm 处拍摄范围为115mm ×184mm。

图1 核测探测器集视觉采集系统示意图
3 自动对接系统设计
堆外核测探测器两级结构的自动对接系统主要包括图像采集、预处理、位置计算以及执行信号反馈。系统流程如图2所示。

图2 堆外核测探测器自动对接流程图
通过抗辐射加固的视觉采集系统获取探测器两级的实时视觉信息,通过HSV 颜色模型将采集的图像转换到HSV 颜色空间。在该空间中,预设在探测器本体上的标识符具有良好的可分性,通过二值化颜色空间提取标识符区域作为前景区域。如果在当前图像帧中提取的标识符区域不满足计算要求,则继续转动探测器的一级。当采集到图像中的两个标识符区域,则进行轮廓提取,并根据轮廓顶点像素坐标计算两个标识符前景的距离,实现对齐转动距离的计算,并反馈至处理单元。
4 HSV 颜色空间分割计算模型
4.1 图像增强
为提升堆外核测仪表系统的使用效率,实现全天候不同光照条件下的自动对齐功能,并且提升基于视觉图像对齐算法的鲁棒性。论文采用两种策略对系统处理能力进行增强。第一,在视觉传感器系统上添加额外光源,获得光照强度适中、均匀一致的原始图像;第二,通过图像增广方式,如图3中所示,模拟不同光照、噪声条件下的图像。通过上述两种图像处理方式,能有效地获取光照质量均匀的图像,并且对不同情形下获取的图像具有良好的处理鲁棒特性。
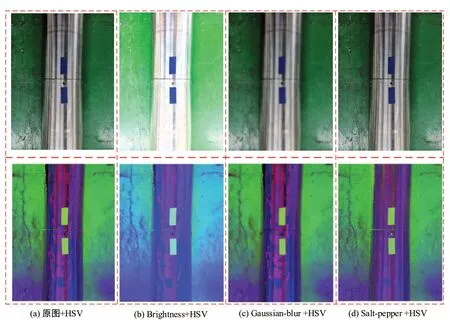
图3 图像增强
4.2 HSV 空间标识符分割
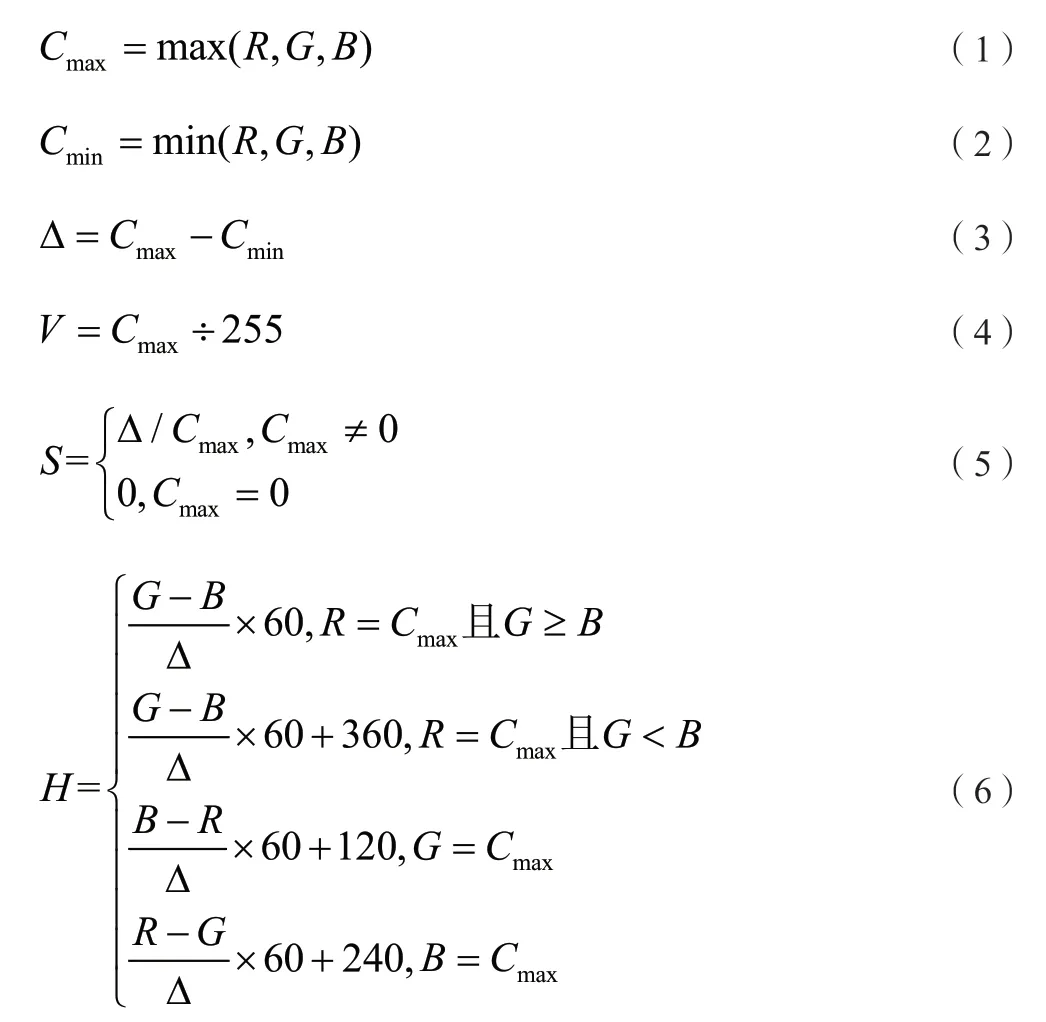
由于辐射电离、场景开度等因素,通过视觉传感器采集的核电设施堆腔环境原始图像仍存在光线分布不均匀,并且存在辐射噪声干扰等特点。通过常规的RGB 图像对标识符区域的提取与分割存在较多不确定因素影响,降低系统分割效率与稳定性。HSV(Hue, Saturation, Value)空间更加接近人类视觉系统对色彩的感知,HSV 颜色空间中有三个参数,分别为H(色调)、S(饱和度)、H(明度),具有较强的可区分性与不确定噪声的鲁棒性,大量基于HSV 颜色空间的图像处理工作取得了良好的效果[4-5]。论文将视觉传感器采集的RGB 图像转化到HSV 颜色空间,通过实验获取H、S、V 通道的分割阈值,实现对标识符区域的分割提取。RGB 图像转换为HSV 图像算法如下:
4.3 轮廓提取与对准
通过获取核测仪器系统探测器两级预设标识符区域,为计算两级探测设备对齐距离,论文提出一种基于轮廓顶点距离的方法。如图中所示,首先通过canny 算子[6-8]获取标识符前景区域的边缘轮廓,获取探测器两级标识区域轮廓的顶点坐标信息;计算对应顶点垂直方向与水平方向距离,求取点对平均距离作为对准信号[9-10],反馈到处理单元。
探测器两级间距离计算方法如公式(7)中所示:

其中h 为探测器两级轴向间的高度距离,l 为探测器两级纵向间的长度距离。

图4 轮廓提取与距离计算
5 实验结果
5.1 标识区域分割验证实验
为了验证探测器两级标识符的分割过程与效果,我们选取同一场景的4 种不同数据增广图像进行HSV 颜色空间分布分析。如图5所示,所有图像在HSV 空间的S 通道具有优异的可区分性。通过统计大量场景中的原始数据与增广图像数据,标识符在HSV颜色模型中的S通道可分阈值为[220-255]。如图5所示,核探测器两级标识符分割性能鲁棒。

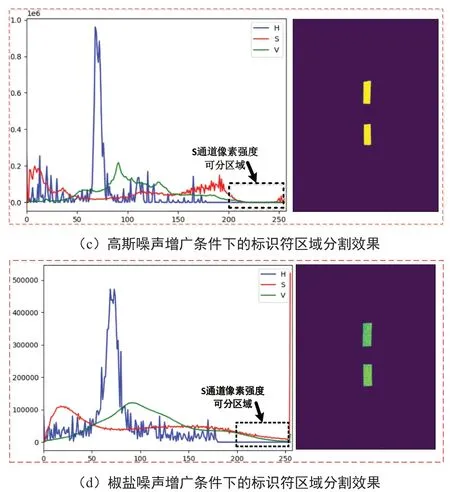
图5 不同条件下的标识符区域分割效果
5.2 对接实验
为证明论文提出方法的有效性,我们在实验室场景与实际场景进行对接验证实验,实验结果如表1中所示。

表1 探测器两级对接实验
6 结语
结合核电设施安全维护需求和实际场景工况特点,论文提出一种基于HSV 颜色模型的堆外核探测器自动对接方法。通过设备抗辐射加固与光源补充,以及图像噪声模拟辐射环境设备全天候工况特点;通过HSV 颜色模型与Canny 边缘提取算子实现探测器两级标识符的鲁棒分割与边缘提取。实验结果表明,论文提出的方法满足实际场景任务需求,有效提高核测仪器系统作业效率与任务安全性。
猜你喜欢
计算机应用(2022年8期)2022-08-24
计算机系统应用(2020年8期)2020-03-22
小学科学(2020年1期)2020-02-18
百科探秘·航空航天(2020年12期)2020-01-22
小学科学(2019年12期)2019-01-06
少儿科学周刊·儿童版(2015年11期)2015-12-17
图书馆建设(2015年11期)2015-08-24
图书馆(2014年3期)2014-12-25
太空探索(2014年9期)2014-07-10
