
基于自抗扰控制的永磁同步电机调速系统研究①
2020-03-02 06:26刘伟亮李培英杨静谷云高
科技创新导报 2020年32期
刘伟亮 李培英 杨静 谷云高
(邯郸学院机电学院 河北邯郸 056005)
永磁同步电机以其高功率密度、高效率、高可靠性等诸多优点在中小功率调速系统获得了广泛应用,其优良性能的实现有赖于适当的控制方法的应用,常见的控制方法有经典PID方法和现代控制方法。其中经典PID控制方法比较成熟,应用最为广泛,但是PID控制品质依赖于控制对象数学模型,对于控制对象参数摄动所产生的干扰抗扰型较差,尤其对于永磁同步电机而言,其参数易受环境因素影响,比如其电阻在电机温度较高时变化较大,交叉耦合特性严重,非线性的本质使得PID的应用稍显困难。基于现代控制理论,人们对永磁同步电机的控制引入了各种现代控制方法,如神经网络控制、模糊控制、自适应控制等[1-3],特定条件下现代控制方法的控制效果表现很好,但是现代控制方法比较明显的特点是算法复杂,计算量大,限制了其在实际中的应用。
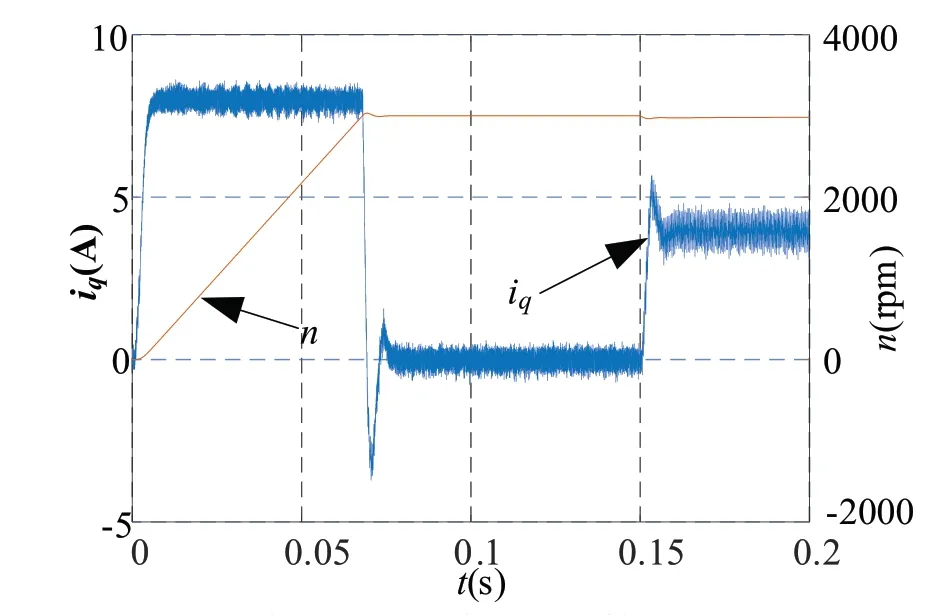
图2 空载启动与加载过程的转速和电流 波形
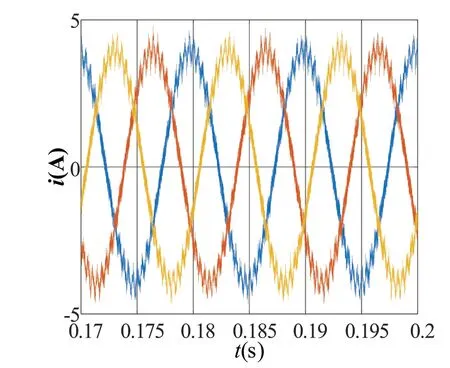
图3 稳态时的三相电流波形
自抗扰控制是韩京清研究员提出的一种新型控制方法[4],具有不依赖控制对象数学模型、把作用于控制对象的所有不确定因素统一处理为未知扰动加以观测以及补偿的特点,自抗扰控制已经在永磁同步电机控制系统中获得了较多应用。文献[5]针对永磁直线电机电流环引入了三阶线性自抗扰控制器,为了减小滞后因素的影响,增加了超前环节矫正。文献[6-7]对永磁同步电机的电流环采用一阶自抗扰控制,位置和速度则复合在一起由一个二阶自抗扰控制器完成控制,其中跟踪微分器跟踪信号为位置信号,微分信号恰好是速度信号,以此来实现位置和速度的复合控制。文献[8]针对内置式永磁同步电机,分别设计了电流和转速自抗扰控制器,并分析了电机参数对控制效果的影响。
本文基于永磁同步电机的数学模型,分别建立双闭环调速系统电流环和转速环的一阶自抗扰控制器,依据不同的非线性函数分别给出电流环和转速环的控制律(见图1)。在此基础上搭建Matlab/Simulink仿真模型对双闭环调速系统进行了仿真验证,分析了转速环性能、电流环性能以及参数摄动时的转速和电流响应,结果表明基于自抗扰控制的双闭环调速系统性能良好。
1 PMSM数学模型
忽略磁场谐波与磁滞损耗、涡流损耗等次要因素,d-q坐标系下永磁同步电机的数学模型可由电压方程、转矩方程、运动方程等表示。永磁同步电机的电压方程可以写成:
式中,ud、uq分别是直轴和交轴电压,id、iq分别是直轴和交轴电流,Ld、Lq分别是直轴和交轴电感,对于表贴式转子结构,Ld=Lq,Rs为定子电阻,ωr为转子电角频率,ψf为转子磁链。
经过坐标变换,永磁同步电机所产生的电磁转矩可表示为:

式中np表示极对数。
忽略摩擦转矩、阻尼转矩,电机运动方程为:

式中ωm表示机械角频率,ωm=ωr/np;TL为负载转矩。
2 PMSM调速系统自抗扰控制器设计
2.1 电流环控制器
根据式(1)交轴电压方程,可知有:


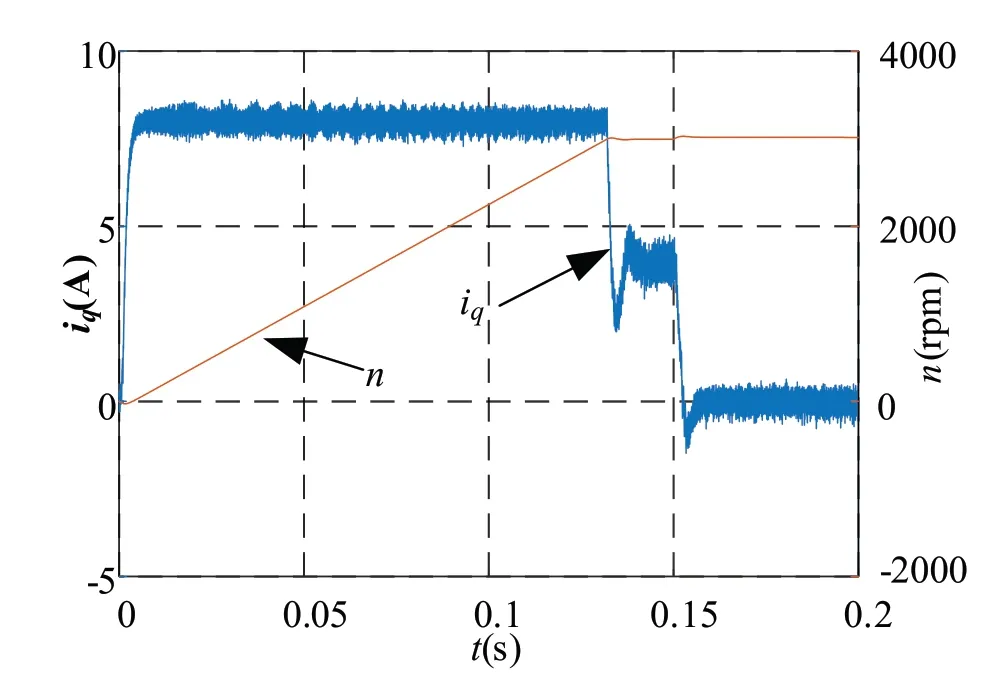
图4 转速闭环带载启动与卸载过程
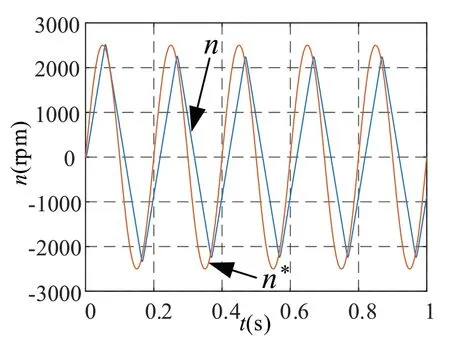
图5 正弦给定时的转速响应
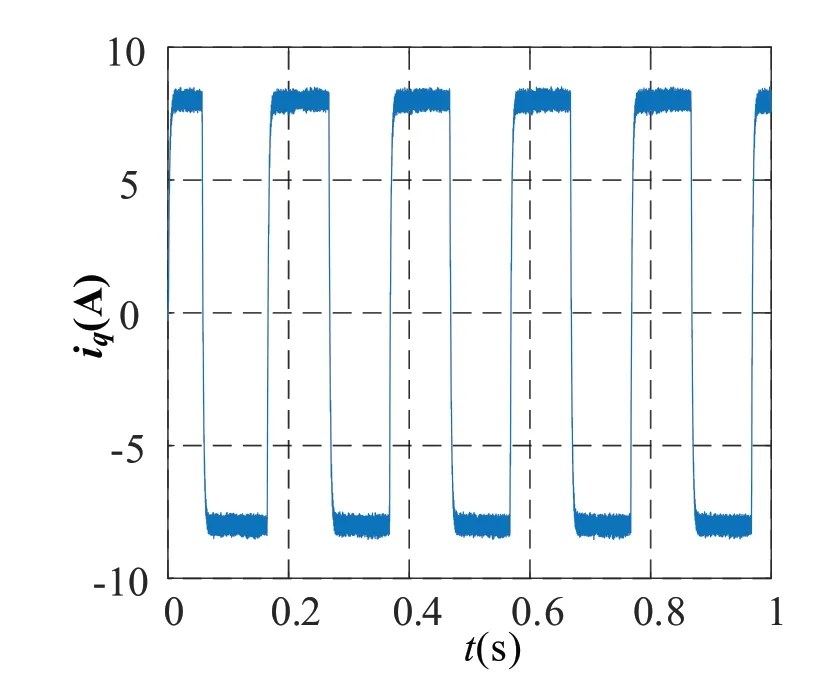
图6 转速正弦给定时的交轴电流
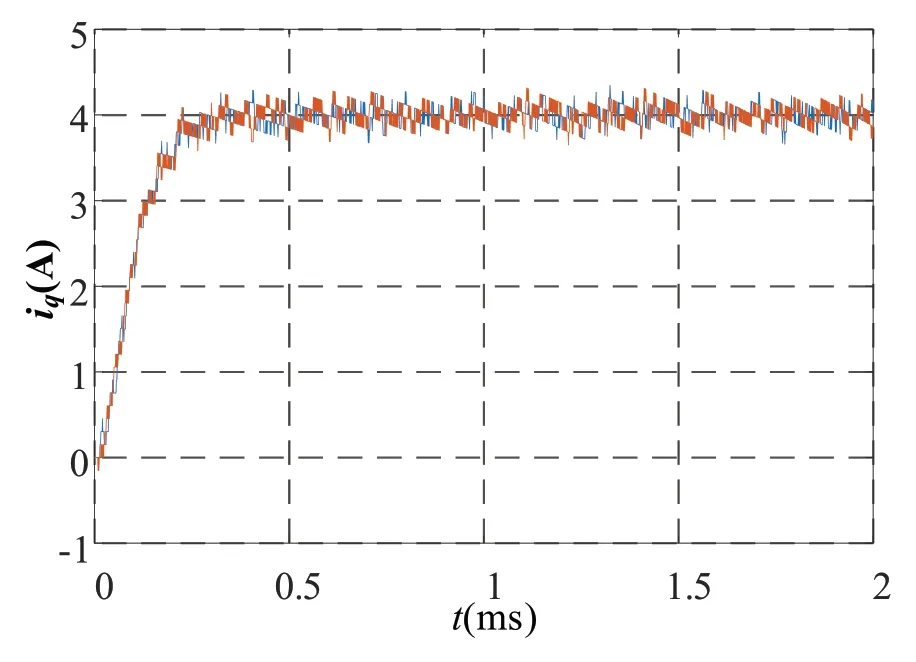
图7 交轴电感不同时的电流响应
考虑到一阶自抗扰控制器不需要给定信号的微分信号,因此这里不设置跟踪微分器,由此包括扩张状态观测器和非线性状态误差反馈控制律在内的电流环一阶自抗扰控制器如下所示:
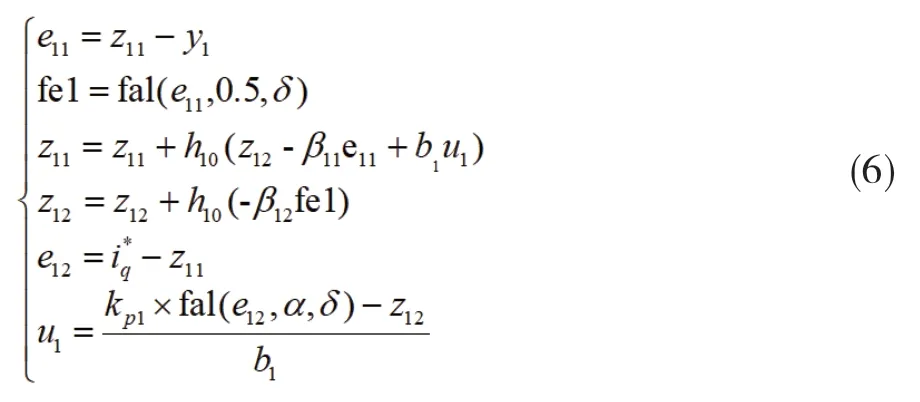
式中e11表示状态观测误差,z11是对系统状态x1的观测值,z12是对总体扰动a1(t)的观测值,β11、β12是观测器系数,其数值与积分步长h10以及系统扰动大小有关;e12是状态反馈误差,kp1是比例系数,fal函数是非线性函数,其定义可如下所示[3]:

式中sign为符号函数,α为参数。fal函数在误差大时增益小,误差小时,增益大,δ是误差阈值,即fal函数中的线性区,作用是防止出现小误差时的高增益引起高频抖振。
通过y1=iq和控制对象上的作用量u1=uq来估计系统状态以及总和扰动,可以把已知扰动和未知扰动都估算在内,其中未知扰动包括w1(t)以及其他诸如模型参数等扰动在内。由于交直轴电压方程的区别就在未知扰动上,其他部分完全一致,因此上述交轴一阶自抗扰控制器可以不加改动直接用于直轴电流控制。
2.2 转速环控制器
永磁同步电机在上述一阶自抗扰控制器的作用下,认为电流环输出与给定近似一致,即iq=iq*。根据电机转矩方程(2)和运动方程(3)可以得出:

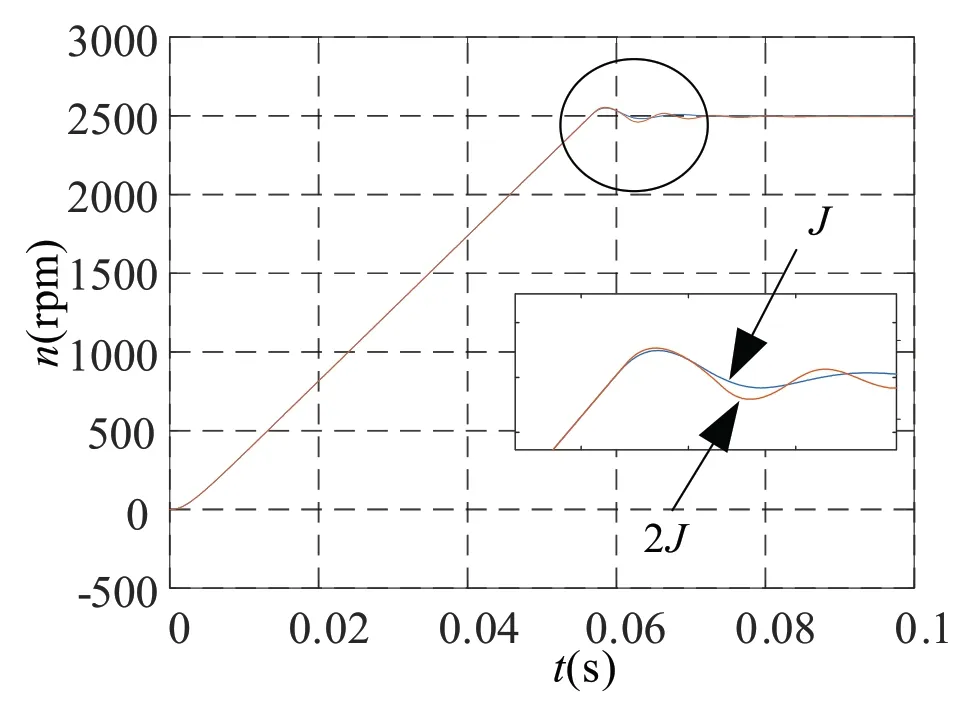
图8 转动惯量不同时的转速波形
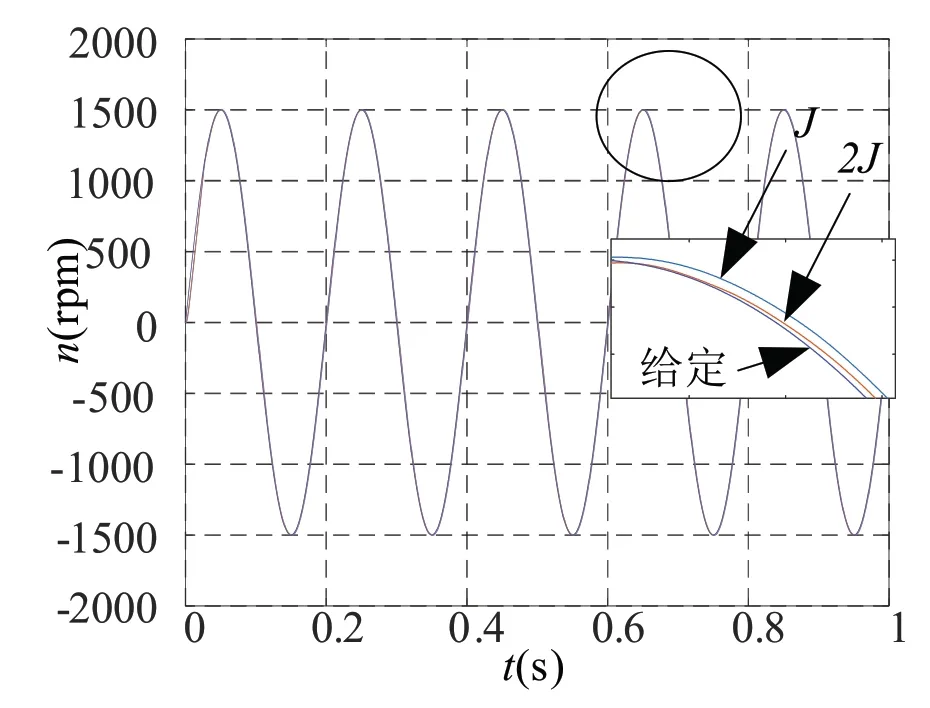
图9 正弦给定下转动惯量不同时的转速波形

相应的由扩张状态观测器和非线性状态误差反馈控制律构成的一阶自抗扰控制器如下所示。
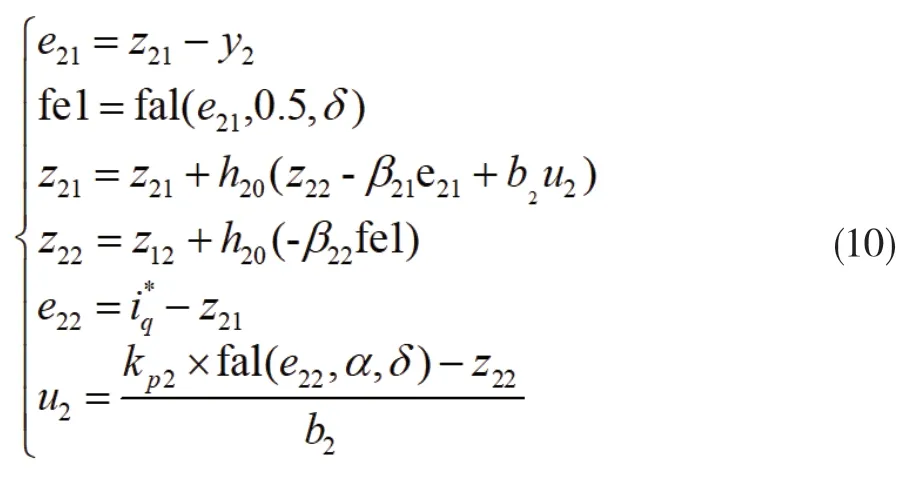
式中e21表示状态观测误差,z21是对系统状态x2的观测值,z22是对总体扰动a2(t)的观测值,β21、β22是观测器系数,其数值与积分步长h20以及系统扰动大小有关;e22是状态反馈误差,kp2是比例控制系数。
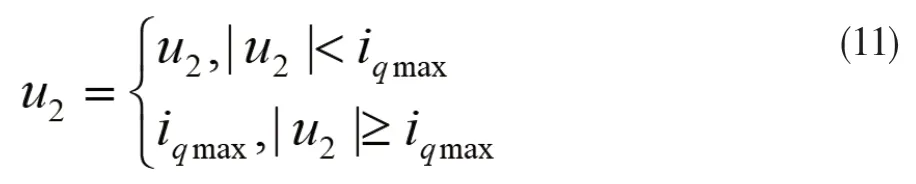
考虑到电机存在最大电流限制,实际控制量输出应为:
调速系统整体结构如图1所示,其中交轴电流环与转速环仍然构成双闭环结构,交轴电流环处于内环位置,转速环位于外环,转速环的输出作为电流环的输入。为获得最大的电流控制效率,直轴电流采用id=0控制,直轴电流给定取0,此外直轴电流环与交轴电流环的控制器完全一致。
3 仿真研究
Matlab/Simulink环境下可以搭建出相应仿真模型,其中电流自抗扰控制器和转速自抗扰控制器钧以离散状态s函数编写。仿真用永磁同步电机参数如下:额定转速2500rpm,极对数为2对极,额定电流3A,额定转矩3Nm,最大转矩6Nm,定子电阻0.6Ω,交直轴电感均为1.9mH,转子磁链为0.253Wb,转动惯量为0.00126kg·m3,SVPWM开关频率为10kHz,直流母线电压为500V。电流环与转速环的仿真步长分别为1e-6s和1e-4s。
3.1 转矩特性仿真
转速闭环时,转速给定为3000rpm,空载启动到0.15s时突加3Nm负载转矩,仿真该过程的转速波形和交轴电流波形如图2所示。由图可知,空载启动过程约68ms,转速略有超调,在突加负载转矩后,转速降落到最低2966rpm,但拖尾时间稍长。从电流波形来看,由于系统采用双闭环结构,转速环的输出作为电流环输入,直接能够限制电流的最大值,这也是双闭环结构调速系统的一大优点;另外可以看出电流波形有一定波动,稳态后波动约在±0.5A以内,这是由于电机电压是通过三相SVPWM逆变电路施加的,电路的PWM开关特性必然会引入高频干扰。 图3给出3Nm负载时的三相电流波形,可以看出电流波形略有畸变。
调速系统带额定负载启动,在0.15s时卸掉负载过程的转速与交轴电流波形如图4所示,带额定负载启动时需要约132ms,在突减负载转矩后,转速升高最高3028rpm,但是恢复时间较长。
下面讨论转速正弦给定下的响应。设转速正弦给定的幅值为2500rpm,频率为5Hz,空载时的转速波形如图5所示。
虽然给定为正弦波形,但实际转速波形变成了接近于三角波,这是由于系统电流有最大值限制,导致转速的变化率即也收到限制,因此实际转速波形不是正弦波。此时的电流波形如图6所示,很明显,在加速和减速阶段,电流都会达到并维持在最大电流8A,使得转速在电流维持在最大值时只能线性变化,波形因而出现畸变。
另一方面,若转速给定幅值较小或者频率较低时,转速响应波形才有可能是正弦波;另外,某些清况下,转速给定为三角波,考虑到电流收到限制的条件下,转速波形同样可能会发生畸变。
3.2 参数摄动影响
首先讨论b1不准确时的特性,转速开环,电流闭环且给定为4A,控制器里面所使用Lq数值增大为准确值1.9mH的2倍,电流阶跃响应特性如图7所示,图中两条电流曲线基本是完全重合在一起的,因此可知,交轴电感变化或者说系数b1变化时,不会对系统性能产生影响,说明电流环自抗扰控制器对于控制对象即电机的参数摄动不敏感,在电机参数变化很大的范围内,扩张状态观测器仍然可以很好的对状态变量即交轴电流进行观测估计,非线性状态反馈控制律的作用使得电流的响应基本不变;此外由图中可知,电流环响应时间约0.2ms,快速性较好,同时也没有出现电流超调。
图8给出空载起动时转速波形及其局部放大图,其中控制器所使用转动惯量数值分别是准确值和准确值的2倍。由图可知,在线性升速阶段,转动惯量不同时的转速波形完全重合在一起,转速波动时波形略有不同,但差别很小。因此可知虽然电机参数摄动出现在电流环外,但转速环自抗扰控制器对于电机参数的摄动干扰同样不敏感。此外由图8可知,空载起动到额定转速2500rpm时所需时间大约为60ms左右,基本上这已经是电流受到限制条件下最快的起动过程了。
转速给定信号为正弦波,其幅值为1500rpm,频率5Hz,空载时的转速波形及其局部放大图如图9所示,图中给出了给定信号波形、以及控制器使用准确转动惯量数值和2倍转动惯量准确值时的转速响应波形。由图可知,参数摄动时的转速波形略有区别,但差别极小,可见转速自抗扰控制器对于参数摄动的抗扰性能非常好;另外由于给定转速幅值减小,此时的转速波形为正弦波,幅值基本没有衰减,时间上相对于给定来说电机转速略有很小的滞后。
4 结语
根据永磁同步电机的数学模型,分别对其电流控制和转速控制设计了相应的一阶自抗扰控制器,以构成双闭环结构的永磁同步电机调速系统。在Matlab/Simulink环境下建立了仿真模型,并对基于自抗扰控制的双闭环调速系统进行了仿真计算,分析了调速系统转速环控制性能和电流环控制性能,结果表明该调速系统具有抗扰能力强,控制精度高等特点。
猜你喜欢
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
黑龙江电力(2017年1期)2017-05-17
环境科技(2016年5期)2016-11-10
光学精密工程(2016年3期)2016-11-07
系统工程学报(2015年2期)2015-02-28
电网与清洁能源(2015年2期)2015-02-28
大电机技术(2015年5期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28
