
人在环条件下的控制重新分配研究
2020-02-29 10:39邵翥陈天红
科技创新与应用 2020年7期
邵翥 陈天红
摘 要:文章基于IFSTA变稳飞机的非线性模型,提出了对于可控故障的舵面控制重新分配方法。本方法根据故障诊断信息,在预置的解决方案中选择合适的方案,利用可操纵的剩余舵面为飞机提供控制力和力矩,减弱故障对飞行性能和品质的影响。文章进行了数值模拟及人在环试验,试验表明控制重新分配算法在复杂操纵和人在回路环境下也能发挥良好的效果。
关键词:舵面故障;控制重新分配;人在环试验
中图分类号:V249.4 文献标志码:A 文章编号:2095-2945(2020)07-0068-03
Abstract: Based on the nonlinear model of IFSTA variable stability aircraft, a new method of control redistribution for controllable faults is proposed. According to the fault diagnosis information, this method selects the appropriate scheme from the preset solutions,the remaining controllable control surfaces are used to provide the control force and moment for reducing the influence of faults on the flight performance and quality. In this paper, numerical simulation and pilot-in-the-loop test are carried out, the test results show that the control redistribution algorithm can also play a good role in the complex control and pilot-in-the-loop situation.
Keywords: control surface faults; control redistribution; pilot-in-the-loop test
引言
飛机操纵面是控制飞机的主要部件,也是安全飞行的关键。在飞行过程中,可能会因为敌方武器攻击、结冰、飞控系统故障、传动机构故障等原因导致操纵面故障。为了提高飞行安全性和可靠性,现代飞机都采用余度设计,多套操纵面互相备份以降低某个操纵面发生故障后对飞行安全的影响,这也给诊断出飞机故障后采取补救措施提供了有利条件。控制重新分配技术就是利用飞机舵面的冗余机制,使用正常舵面代替故障舵面的功能,达到保障飞行安全的目的[1]。
1 控制重新分配技术原理
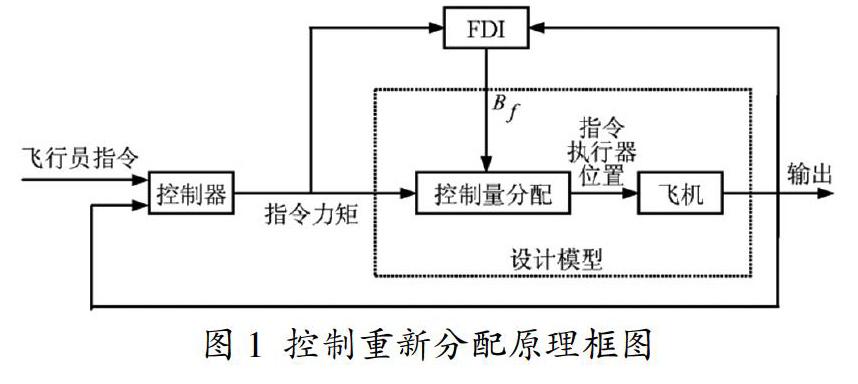
本文的控制重新分配技术依赖于故障诊断技术,由于篇幅原因,未能详细描述故障诊断技术,且认为试验中所涉及的飞机系统可快速识别诊断舵面故障。在识别故障之后,采用控制量分配法重新分配舵面命令,原理如图1。控制量分配算法把输入看做是期望的力和力矩,而期望的力和力矩ud的产生是通过一定的算法从控制输入u中选择得到的。这种算法能否实现取决于ud∈Rm的维数和故障后矩阵Bf∈Rn×k(矩阵Bf可以采用FDI或系统辨识获得)的列的秩[2,3]。
控制重新分配算法主要用于有控制输入冗余的系统,其具体计算流程如下:飞机系统出现故障后,我们对控制重新分配算法的期望结果为式(1),即重新匹配的舵面控制命令ur应使得系统在故障情况下保持与原期望输出相同,也就是飞行员和飞控系统无需因为故障修改控制输入,达到消除故障影响的目的[4,5]。
期望达到的效果为:
Bfur≈Bu (1)
其中Bf=BFi,ur=Diu。考虑到出现完全故障时,会因为Fi某一行全部为0而导致等式无法成立,所以无法两边同时乘B的逆矩阵(或广义逆)以去掉B,但是该式应对所有u成立,所以有控制重新分配矩阵为[6]:
Di≈(BFi)+B (2)
2 舵面故障分类
通过对舵面故障进行分类,列出控制重新分配技术所适用的舵面故障模式将有利于准确补偿故障带来的不良影响。常见的飞机舵面故障有以下几类:
(1)舵面卡死及偏角不足故障:此类故障是最常见的舵面故障,发生这类故障后,由于舵面控制力大幅减弱,会对飞行安全带来严重危害。
(2)舵面偏转速率不足故障:此类故障由电源掉电、液压泄露等原因导致。表现为舵面的偏转速率降低,无法与驾驶杆的操作或飞控命令相统一。舵面虽然实时跟随最新指令,但实际偏角和偏转速率却达不到指令要求。
(3)舵面操纵延迟:舵面操纵延迟是因为信号传输、指令传递出现延迟导致舵面反应不及时,这类故障会使舵面动作统一延迟一段时间。虽然舵面实时的动作与指令是不协调的,但是并不会丢失任何部分的舵面指令。
(4)舵面限幅:此类故障是由某一环节的机械卡阻或电子元件饱和导致的。表现为在小幅操纵时,舵面偏转正常。随着舵偏指令逐渐增大,舵面偏角会被限制在某一值而无法继续增大。
本文将重点关注控制重新分配技术对常见的舵面偏角不足故障的应急补偿能力。
3 数值模拟试验
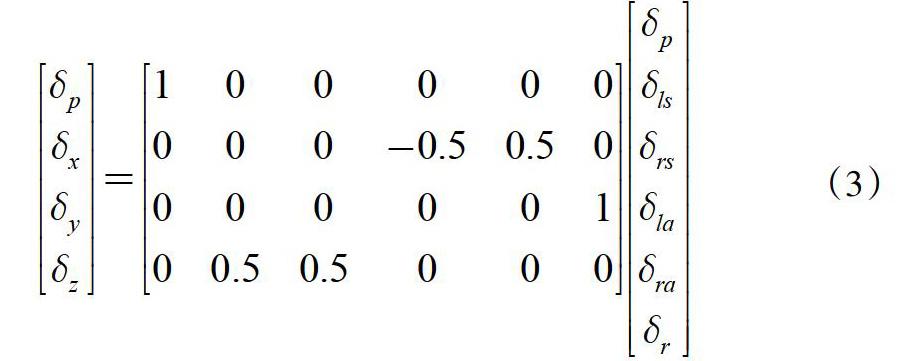
本算例将验证副翼单边偏角不足后,使用控制重新分配算法进行容错控制的可行性。将原本的油门、副翼、方向舵、升降舵四个输入量扩展为油门、左升降舵、右升降舵、左副翼、右副翼、方向舵形式的六路输入,即:
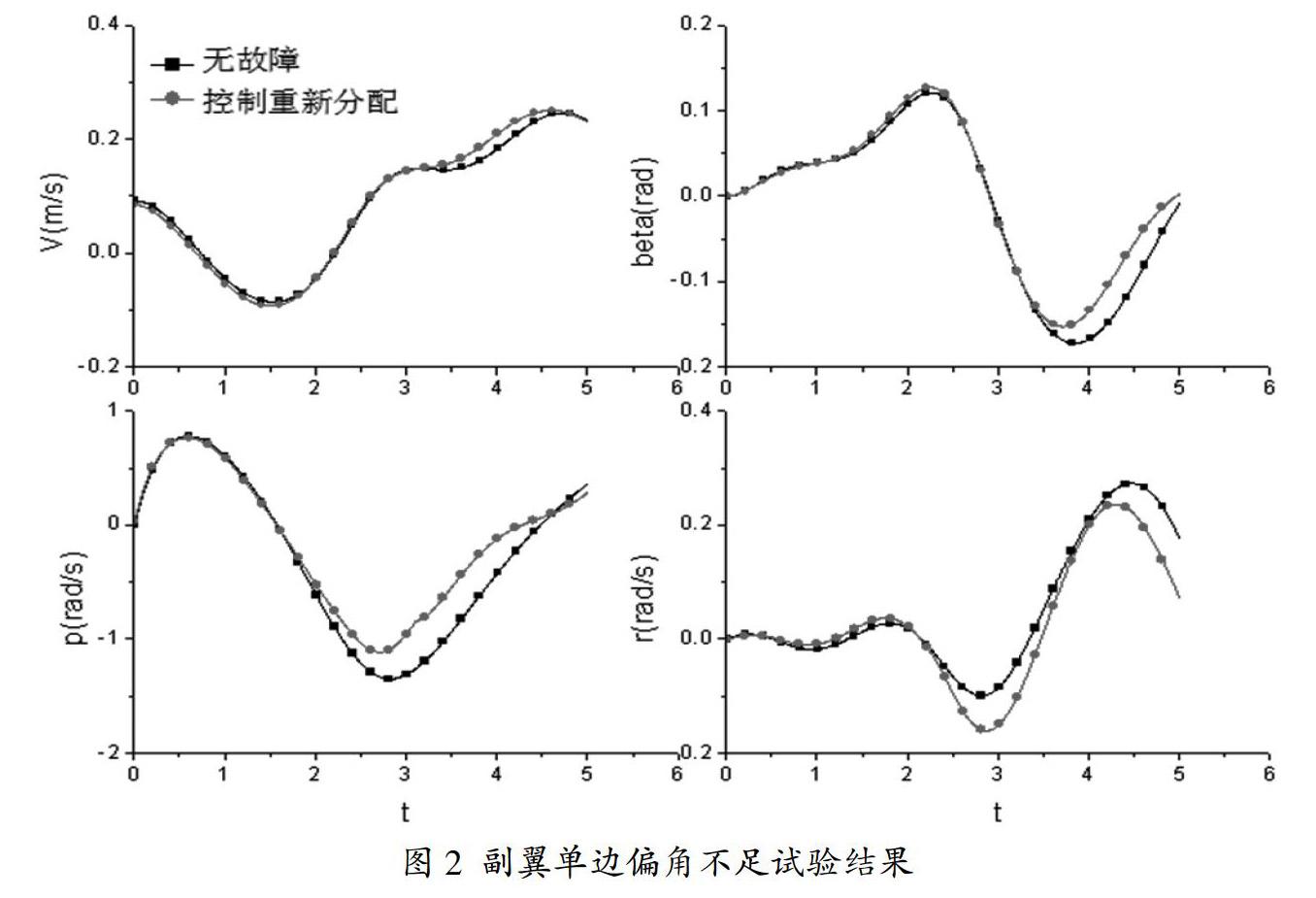
本算例在t=1.2s时,加入右副翼偏角不足故障,使得右副翼的偏转角度只能达到命令值的50%。当故障诊断算法识别到此故障时,将会根据第一节中的计算方法计算得到控制重新分配矩阵。此矩阵重新分配了左右副翼的控制命令,使得受损的右副翼偏角减小,使功能正常的左副翼偏角增大,以补偿右副翼损失的控制效能。整个过程的主要飞行参数变化曲线如图2。
由图中两个角速率的变化情况可知,经过控制重新分配后,角速度逐渐与输入指令相匹配,飞机的操纵特性逐步恢复到正常状态。而速度和侧滑角则存在一定稳态误差,这部分稳态误差需要飞行员自行修正。
4 人在环试验
人在环试验的试验环境为带有可活动基座的六自由度高仿真模拟器,可以最大程度使飞行员感受到实际飞行的感觉,使飞行员的习惯和反应与实际飞行接近,有利于提高人在环试验的可参考性。本试验中,飞行员在配平点配平后,进行纵横航向混合输入,在飞行过程中随机加入升降舵偏角不足故障,通过故障识别算法诊断故障后,根据故障重新分配控制命令。
图3展示了同样输入下,无故障状态和发生、识别故障,并采用控制重新分配算法进行控制补偿两种状态的区别。所展示的区间内全程存在升降舵故障,在t=177.69s时,开始实施对升降舵的控制补偿。可以看出,各纵向参数逐渐恢复到无故障时的状态值,尤其迎角等变化明显,效果显著。速度等参数则与上文的结果类似,这类参数在经历过故障发生、识别、处理后会与无故障状态值存在稳态误差,需要使用其他方法进行修正和恢复。整个过程消除了升降舵故障所带来的影响,且对横航向参数影响较小,证明控制重新分配算法在复杂的人在环情况下也具有一定实用性。
5 结束语
本文针对所选飞机模型,提出了一种控制重新分配方法,并对常见的舵面故障进行了分类。选取横向和纵向的舵面偏角不足故障为算例,经过数值模拟试验及人在环模拟器试验,验证了此方法在较复杂输入及人在环环境下均有较好的容错控制效果。
参考文献:
[1]郭玉英.基于多模型的飞机舵面故障诊断与主动容错控制[D].南京:南京航空航天大学,2009.
[2]Curtis Steven Clark,Multiple Model Adaptive Estimation And Control Redistribution Performance on The VISTA F-16 During Partial Actuator Impairments[R]. Wright-Patterson Air Force Base,1998.
[3]Robert Weston Lewis Senior,Multiple Model Adaptive Estimation And Control Redistribution For The VISTA F-16[R]. Wright-Patterson Air Force Base,1997.
[4]聞新,张洪锁,周露.控制系统的故障诊断和容错控制[M].北京:机械工业出版社,1998.
[5]张平,陈宗基.飞机操纵面故障研究及其补偿重构[J].飞行力学,1997,15(3):69-74.
[6]L. Ni and C. R. Fuller. Control reconfiguration based on hierarchical fault detection and identification for unmanned underwater vehicle[J]. Journal of vibration and control, 2003,9:76-83.
