基于视频的交叉口排队过程感知及预测
2020-02-28 02:56黄柳红李熙莹
交通运输系统工程与信息 2020年1期
余 志,黄柳红,李熙莹,栗 波,邹 兵
(1.中山大学智能交通研究中心,广州510006;2.广东省智能交通系统重点实验室,广州510006)
0 引 言
在城市路网中,交通拥堵问题的根源在于道路与车辆间的供需不平衡,交叉口的供需冲突尤为突出.交叉口信号控制方案的优化及交通管理策略的实施成为提升交叉口通行能力的关键,而交叉口停止线附近各车道的排队过程及其演变,对交通管理策略的制定及信号控制方案的优化都极具参考价值.
依据车辆排队情况,交叉口的排队过程可以划分为排队、消散和积累3 个阶段.早期的基于视频的排队过程感知主要以单一阶段的感知为主,对排队过程的感知较为片面,仅能得到单一的交通参数[1-2].近年来,研究者们开始研究不同排队阶段的关联,以得到更为丰富的排队次数、平均停车延误等参数.文献[3-4]结合路段上下游交叉口的车辆车牌检测信息,构建流入—流出模型以关联车辆排队和消散阶段,估计停车延误等参数,该类方法受限于车辆换道、超车等情况,检测准确率较低;文献[5]通过跟踪路段内每辆车得到各类精细的交通参数,但该类方法不够鲁棒,易受车辆遮挡和车流量影响,容易误跟踪;文献[6-8]以排队长度检测为核心,确定并跟踪排队的队头、队尾,得到关联的排队和消散阶段,该类方法可整体关联排队和消散阶段,但缺乏车辆个体级别的关联,无法得到更为精细、实时的停车延误和排队车辆数等参数.此外,传统的排队过程感知方法缺乏对积累阶段的感知,无法把握将来的排队过程,但未来短时间内的排队过程演变对交通管理、信号控制等均具有极为重要的指导意义.
基于上述问题,本文结合排队长度检测和车辆检测方法得到车辆排队情况,并在此基础上,将排队过程划分为排队、积累和消散3 个阶段,利用车道重构和KCF跟踪等方法提取相应排队阶段的关键车辆行为信息,再结合车辆到达先后次序信息,将不同排队阶段进行车辆个体级别的关联,实现交叉口车辆运行轨迹重构,实现实时、精细、鲁棒的排队过程感知,以及排队长度,排队次数和停车延误等交通流综合参数检测.同时,增加积累阶段的感知,实现以短时排队长度预测为代表的排队过程预测.
1 方法概述
图1为所提出的基于高空视频的排队过程感知及预测方法的框架.分为4 个部分:①基于交叉口高空视频,通过边缘检测和车辆检测等方法提取道路车辆信息;②对道路和车辆边缘信息进行卷积融合,检测排队区域和排队长度;③基于排队区域划分不同排队阶段,结合车辆检测结果,利用车辆到达先后次序信息和车道重构等方法感知并关联不同排队阶段的车辆信息,重构车辆运行轨迹;④根据车辆运行轨迹,逐车道检测交叉口交通流参数及预测短时排队车辆数.
2 道路车辆信息提取
主要基于背景建模和目标检测等方法得到道路区域、车道线、标志标线、车辆边缘和车辆定位信息,检测结果如图2所示.
3 排队长度检测
传统的基于视频的排队长度检测方法主要有3 类,分别是基于小窗口、基于伸缩框及基于中线的排队长度检测方法.本文在基于伸缩框的排队长度检测方法的基础上,缩小车道兴趣区域,通过空车道区域检测反求排队区域,具体如下:
Step 1卷积融合运动车辆和车辆边缘检测结果,得到静止车辆边缘.
Step 2经中值滤波和膨胀处理后,对静止车辆边缘进行求反,得到空车道区域,以0.25 与0.75倍的车道宽度之间的车道区域作为排队检测兴趣区域.同时,筛去小面积区域,结合轮廓提取方法得到空车道轮廓,并求取最小外接矩形得到空车道区域,如图3(a)所示.
Step 3基于单车道排队检测兴趣区域,对空车道区域求反,筛去小面积区域,得到候选排队区域.
Step 4结合文献[9]提出的图像—实际坐标转换方法,将候选排队区域图像坐标转换为实际坐标,合并实际间距在平均车头间距内,且图像间距在相邻最小排队区域图像长度内的相邻候选排队区域.
Step 5根据信号配时信息及候选排队区域到停止线的距离,以1.5 倍平均车头间距为阈值,筛选得到最终的排队区域及排队长度.
Step 6若当前排队长度较过去时刻的排队长度下降较多时,取过去时刻的检测结果作为当前结果,检测效果如图3(b)所示.
4 排队过程感知及预测
4.1 排队过程划分
以目标车辆中心点与排队区域的位置关系为依据,划分排队、积累和消散车辆.定义目标车辆中心点坐标在排队区域内的车辆为排队车辆,目标车辆中心点不在排队区域,且在停止线上方的车辆为积累车辆;相反,在停止线下方的车辆为消散车辆.

图3 排队检测示意图Fig.3 Sample graphs of queue detection

式中:Sqj,Saj,Sdj分别为车道j的排队、积累和消散车辆下标集合;i为待分类车辆下标;yij为车道j的待分类车辆i的中心点纵坐标;DSj,DXj分别为车道j的排队区域纵坐标上限和下限;nj为车道j的待分类车辆数.
4.2 车辆行为重构及预测
不同排队状态的车辆所必需的时间和位置信息不同,且在交叉口停止线附近一定距离内,禁止车辆换道,意味着绝大部分车辆的排队和消散次序不变.因此,分阶段提取车辆关键行为信息,结合各车道的车辆到达和离去次序将不同排队阶段的车辆信息进行匹配,重构交叉口每辆车的运行过程.
对于排队车辆,停车时间是关键,通过比对不同时刻的排队车辆数得到各排队车辆的停车时间.对于消散车辆,过车时间必不可少,通过在停止线附近设置虚拟线圈检测占有率,得到过车数和过车时间.对于积累车辆,需要预测排队时间,对此,通过KCF 跟踪算法对积累车辆进行跟踪,得到车辆速度,结合车辆距排队队尾的距离和位置信息得到每辆车的预测排队时间,即
式中:tj,i为车道j的车辆i的预测排队时间;Dj,i为车道j的车辆i距排队队尾的距离;nj,i为在车道j,车辆i下游的积累车辆数;vj,i为车辆速度;lm为平均车辆长度.
对于各阶段的车辆,所在车道是关键位置信息,提出一种快速划分车辆所在车道的车道信息重构方法,以获取车道信息,公式为

式中:k0,k1,…,km-1为各车道线的斜率;b0,b1,…,bm-1为各车道线的截距;y0,y1,…,yn-1为车辆中心点纵坐标;x0,x1,…,xn-1为车辆中心点横坐标;Li为车辆i所属车道.
5 交通流参数提取
对于排队车辆数,结合排队阶段的车辆检测结果和实际排队长度对排队车辆数进行修正,以得到更为精确的结果,公式为
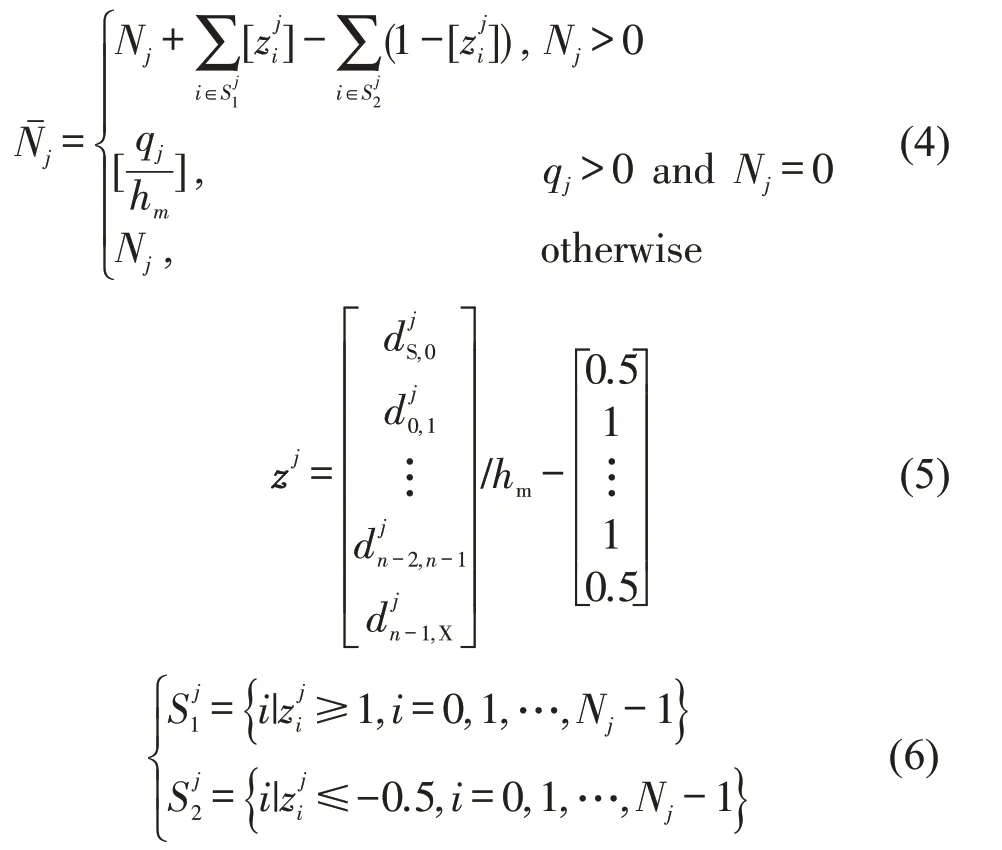
对于未来排队车辆数,基于各车道的排队车辆数及积累车辆的预测停车时间,预测未来该车道短时的排队车辆数,当车道j的车辆i的预测排队时间为tj,i,在该车下游,有Nj辆排队车辆,nj,i辆积累车辆,则在tj,i时刻,车道j的预测排队车辆数为(Nj+nj,i+1).此外,停车延误是评价交叉口运行状态的一个重要参数,结合车辆轨迹重构得到的每辆排队车辆的停车时间和离去时间检测停车延误.对于排队次数,基于排队阶段的最大排队车辆数和消散阶段的过车数来判断排队次数及相应的排队车辆数.
6 实验结果
为充分验证本文提出的分阶段感知再关联的排队过程感知方法的有效性,分别从理论和实际角度出发,对方法的有效性进行验证.
6.1 数据集
主要选取珠海市香洲区的一个交叉口的90个周期的高空视频作为测试集,时段为15:00-21:00,交叉口转向情况如图4所示.其中,选取60个周期的视频作为方法理论效果验证集,30 个周期的视频作为方法实际应用效果验证集,如图5所示.
6.2 评价指标
用平均绝对误差(EMAE)和准确率(P)来衡量方法效果,公式为

式中:n为总数据数;为第i个数据的真值;yi为第i个数据的检测值;NTP为判断正确的数据数;NFP为错误判断的数据数.

图4 交叉口转向Fig.4 Turning at intersection

图5 实际应用验证数据集Fig.5 Dataset for practical applications
6.3 结果分析
(1)理论效果.
主要基于车辆到达先后次序关联不同排队阶段的车辆信息,因此关联效果易受过车检测、排队车辆检测和车辆换道掉头行为影响.过车和排队车辆检测是相对可控的,因此主要探讨不可控的车辆换道掉头行为对关联方法的影响,用停车延误的准确率来衡量关联算法匹配准确率.本文方法理论效果如表1所示.由表1可看出,由于与不同相位车道相邻,车道1 和5 的换道,掉头行为较多,其停车延误准确率较低,但仍有92%以上的准确率,表明绝大部分车辆的运行轨迹匹配结果准确无误,不受换道、掉头行为影响.本文算法得到的平均每辆车的停车延误误差在0.79 s,误差较小.此外,在二次排队判断中,所提方法的平均准确率可达94%,平均排队车辆数误差仅为0.17 veh,表明在排队次数判别中,车辆换道影响不大.

表1 本文方法的理论效果Table1 Theoretical effect of proposed method
此外,鉴于排队区域划分对交通流参数检测至关重要,以排队车辆数检测误差来衡量排队区域的划分误差,探讨排队区域划分误差对交通流参数检测的影响.由图6可看出,对于停车延误,持续多检/漏检2 veh以内的情况下,误差值在25 s以内,是可接受的;对于二次排队判别和排队车辆数预测,持续多检1 veh 或者漏检车辆的情况下,判别准确率和预测排队车辆数误差分别在70%和3 veh以内,检测效果较好;表明本文方法对排队区域划分误差有一定容忍度.
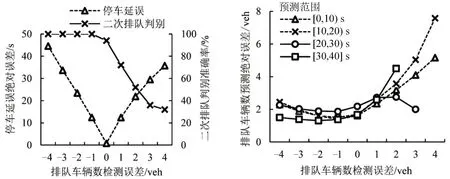
图6 敏感性分析结果Fig.6 Results of sensitivity analysis
(2)实际应用效果.
为验证本文方法的实际应用效果,结合上述排队长度和过车检测等方法进行排队过程感知与预测,检测效果如下:
①排队长度及排队车辆数.
为验证本文排队长度检测算法的效果,这里将本文算法与文献[10-11]的方法进行比较.由表2可看出,本文算法在不同排队车辆数和时间段下,平均排队像素长度误差均在(23±8)pixel以内,相差不大,并且误差均比其他算法低2 倍以上,说明算法检测效果较好,对车流量和光照变化均比较鲁棒.此外,本文算法的平均每车道排队长度检测误差约为6 m,排队车辆数误差均在1.5 veh标准车内,可以满足实际信号配时和交通管控需求.

表2 本文排队长度检测算法效果及与其他方法对比Table2 Comparison of queue detection results
②停车延误及排队次数.
由表3可看出,本文算法得到的停车延误平均绝对误差在12.7 s,其误差主要由排队检测震荡导致的车辆排队时间不准,车辆漏检导致的车辆误匹配引起.
对于二次排队判断,在平均最大排队车辆数和过车数误差分别在1.22 veh 和0.73 veh 情况下,本文算法的准确率可达71.88%,二次排队车辆数平均误差约为1 veh,说明本文方法切实可行且检测精度较高.

表3 停车延误和排队次数检测效果Table3 Results of stop delay and queueing times
③短时排队长度.
为验证短时排队长度预测方法在实际应用中的有效性,在当前排队区域检测结果的基础上,进行短时排队长度预测.由图7可以看出,本文算法在0~10 s 内的平均预测误差均在1.5 veh 车内,短时预测精度较高.
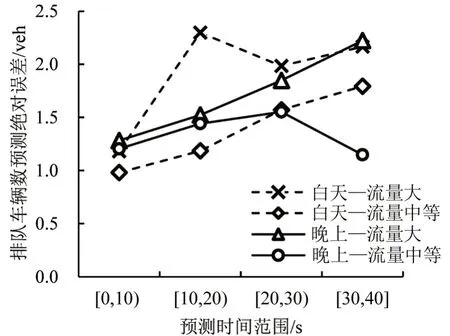
图7 排队预测效果Fig.7 Results of queue prediction
7 结 论
本文提出一种基于视频、分阶段感知再关联的排队过程感知及预测方法,通过划分不同排队阶段,结合车辆时空和到达次序信息分阶段提取并关联车辆关键行为信息,重构车辆运行轨迹,从而检测精细的排队车辆数和排队次数等交通参数.实验结果表明,本文方法切实可行且准确率较高,对排队区域划分误差有一定容忍度,在不考虑实际检测错误的情况下,95.7%的排队车辆轨迹重构结果是准确的.同时,在实际应用过程中,本文方法有很好地检测鲁棒性和精度,在晚上,排队车辆数较多的情况下,平均排队车辆数检测和0~10 s内的预测误差仍可在1.5 veh车内.此外,鉴于排队检测震荡和车辆漏检等问题,实际停车延误和排队次数检测效果有待提升,未来将着重解决这些问题以进一步提升检测效果.
猜你喜欢
建材发展导向(2022年14期)2022-08-19
卫星应用(2021年11期)2022-01-19
建材发展导向(2021年19期)2021-12-06
小学生学习指导(低年级)(2021年4期)2021-07-21
科学大众(2021年9期)2021-07-16
中国交通信息化(2020年11期)2021-01-14
小学生学习指导(低年级)(2018年9期)2018-09-26
学生天地(2018年18期)2018-07-05
中国房地产业(2016年2期)2016-03-01
中国交通信息化(2015年10期)2015-06-06