
电动车用IPMSM参数在线辨识与MTPA在线寻优
2020-02-25 03:18许幼奇
汽车实用技术 2020年1期
许幼奇

摘 要:文章通過对电动车/混动车/增程车用IPMSM参数在线辨识及MTPA在线寻优,有效弥补了在行车过程中因为参数变化而导致IPMSM的效率下降。关键字:EV;HEV;IPMSM;参数辨识;MTPA中图分类号:U469.7 文献标识码:B 文章编号:1671-7988(2020)01-35-03
Abstract: Through parameter identification of IPMSM in EV/HEV and MTPA search online, effectively compensate for the it's efficiency drop because of parameter variations during operation.Keywords: EV; HEV; IPMSM; Parameter Identification; MTPACLC NO.: U469.7 Document Code: B Article ID: 1671-7988(2020)01-35-03
序言
随着国家及民众对环保越来越重视,电动车/混动车/增程车的发展得到一个很好的机会。但相对于油车来说,这些车的续航是非常大的问题,严重制约这些环保车销量的进一步增长。除了在电池方面做进一步研究外,提高这些车的IPMSM(内置式永磁同步电机)运行效率是个非常好的方法。不仅利于环保,而且有好的经济利益。
对于提高IPMSM运行效率来说,MTPA是一个非常好的控制方法。但是MTPA的是超越方程,很难找到其解析解。目前有曲线拟合[1]、查表[2]等得到MTPA近似解,同时IPMSM电机参数运行时不停变化[3],导致以上这些方法在实际运行误差较大,达不到最优效率。
本文通过在线辨识IPMSM参数再进行MTPA在线寻优的方法有效弥补了运行过程中由于参数偏移导致运行效率下降的缺陷,保证了IPMSM在行车过程中的一直处高效率运行区域。
1 电机模型
假设IPMSM:
(1)忽略定、转子铁心磁阻,不计涡流和磁滞损耗;
(2)永磁材料的电导率为零,永磁体内部的磁导率与空气相同;
(3)转子上没有阻尼绕组;
(4)永磁体产生的励磁磁场和三相绕组产生的电枢反应磁场在气隙中均为正弦分布;
(5)相绕组中感应电动势波形为正弦波。
可得到IPMSM的基波数学模型[4],并将其离散化[5]可得:
图1中,赭红色线为实际的直轴电感Ld值,蓝色线为直轴电感Ld的辨识值。系统模拟了实际直轴电感Ld值发生突变(赭红线在1时刻发生阶跃),可以看到经过一段时间,Ld辨识值(蓝色线)就趋近于Ld的实际值了。
3 MTPA的推导
对于IPMSM而言,其d轴(直轴)、q轴(交轴)电感不相等。因此可以利用其不等,比PMSM或d轴电流为零的控制方式产生额外的磁阻转矩。
那么在实际过程就可以通过分配不同d轴(直轴)电流,与d轴(交轴)电流使得在输出同等转矩时的情况下,定子电流达到最小,进而减小损耗,提高电机的效率,这种方法就称作MTPA,最大转矩电流比。
令IPMSM的力矩Te[4]的梯度为零,就可使得同等转矩下的定子电流Is最小。
4 MTPA的在线计算
式(6)是个超越方程,也就是说方程中解无法用不包含解本身的多项式来表示。这意味着该方程无法通过传统的因式分解等方法来求解。
这时,牛顿迭代法[6]就派上用场了。迭代法是一种不断用变量的旧值递推新值的方法。跟迭代法相对应的是直接法,即一次性解决问题。迭代算法充分利用了计算机运算速度快、适合做重复性操作的特点,让计算机重复执行一组指令(或一定步骤)。在每次执行这组指令(或这些步骤)后,都从变量的原值推出它的一个新值。通过一定迭代次数,使得新值趋近于方程的实际解,就把方程的解给求出来了。
持续迭代,当前后两次迭代值差值的绝对值小于一个很小的数,或者超过一定迭代次数,就可以当前迭代值就是我们所要求的方程的解。即求出了满足MTPA的直轴电流给定值id。
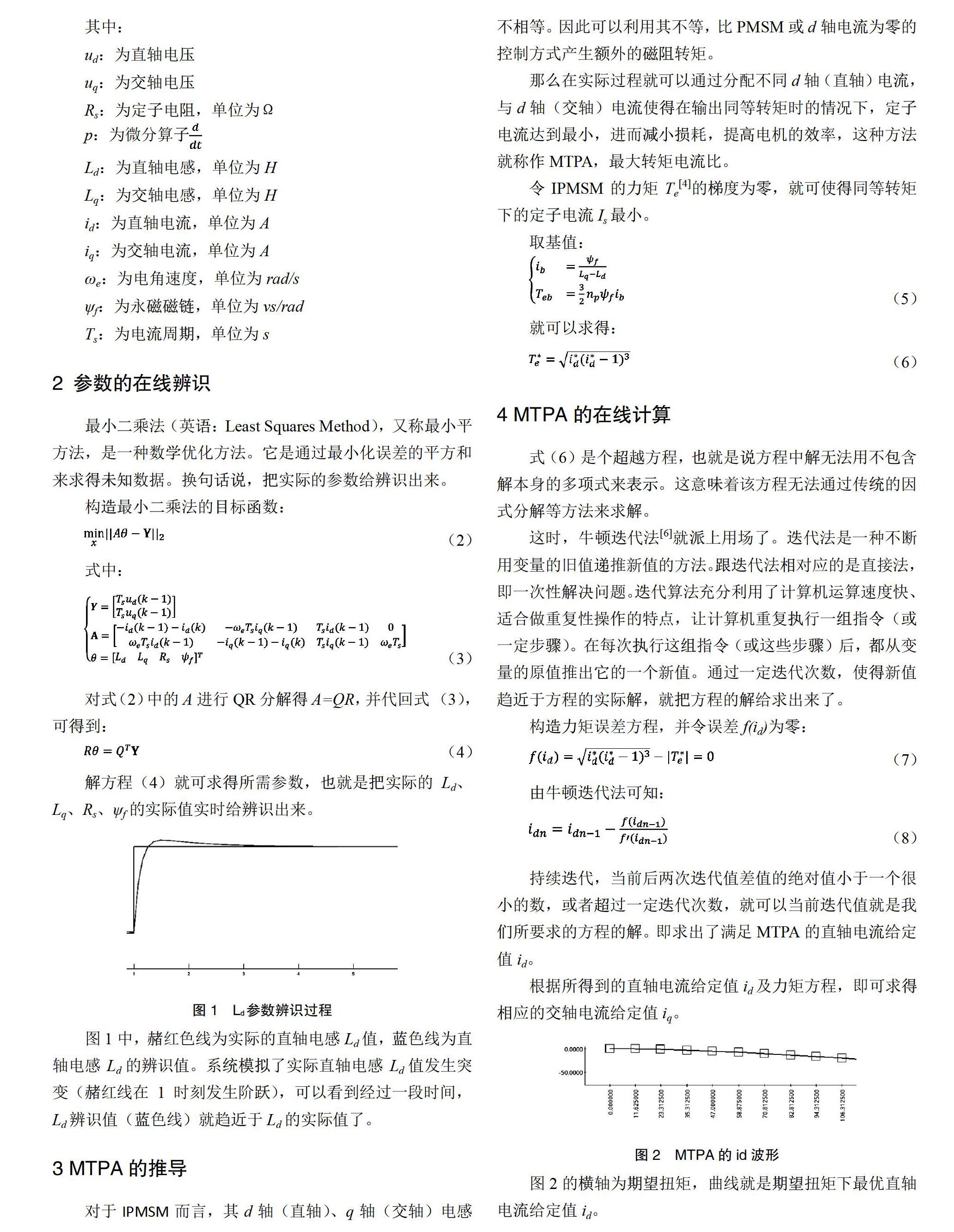
根据所得到的直轴电流给定值id及力矩方程,即可求得相应的交轴电流给定值iq。
图2的横轴为期望扭矩,曲线就是期望扭矩下最优直轴电流给定值id。
5 系统仿真实验
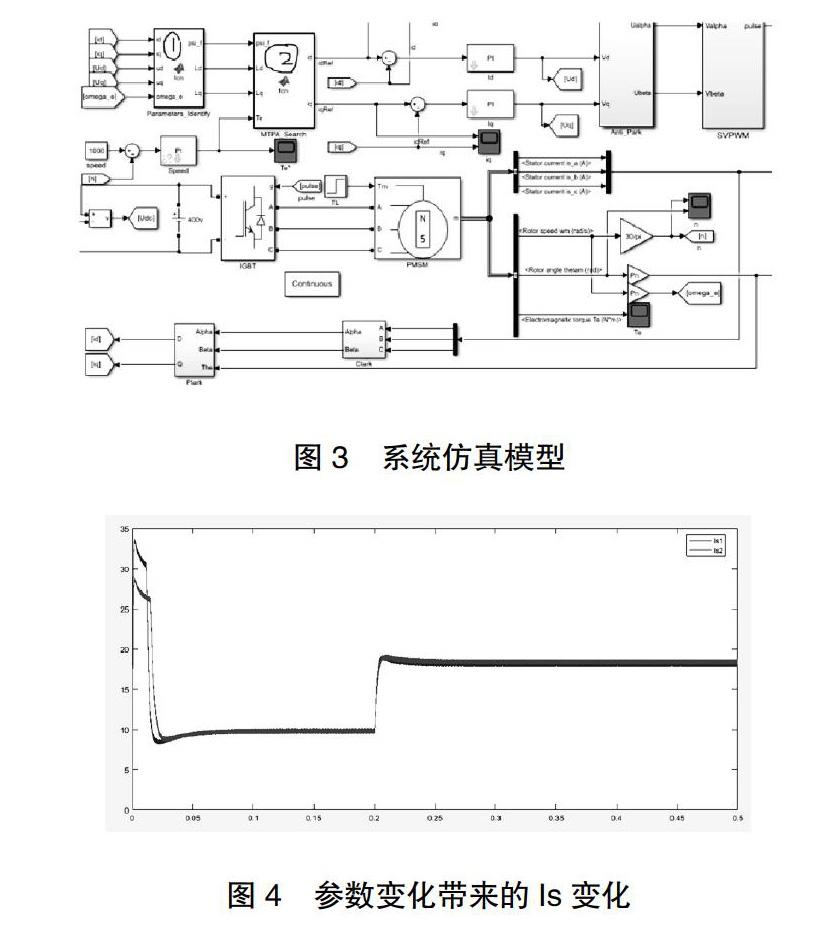
图3中①为参数在线辨识的m函数,②为MTPA在线寻优的m函数。
图4中蓝色线为引入参数辨识后MTPA在线寻优的定子电流Is曲线,红色线为使用原始参数的MPTA在线寻优的定子电流Is曲线。
可以明显看出,引入参数辨识后:
(1)定子电流Is值更小。这说明,系统的运行效率得到明显的提升。换句话说,系统更节能,同样的电量下汽车跑
得更远。
(2)在同样的控制参数及算法下,定子电流Is的波动更小。这使得汽车的NVH(噪声、振动与声振粗糙度)更小,提高乘车舒适性,司机及乘客也能获得更好的驾乘体验。
6 结论
通过对IPMSM参数的在线辨识及MTPA在线寻优,有效的克服了IPMSM运行中参数变化带来的效率下降问题,使得新能源车在整个行车过程中持续高效率运行。
引用文献
[1] 李军,罗达逸,余家俊.基于变阶次分段曲线拟合的MTPA控制[J].计算机仿真,2013, 30(7): 226-230.
[2] YU H S, LIU X D, YU J P. Position tracking control of PMSM based on state error PCH and MTPA principle [C] //IEEE Conference on Robotics,Automation and Mechatronics,RAM-Proceedings.Qingdao: IEEE, 2011,9:113- 118.
[3] 李红梅,陈涛.永磁同步电机参数辨识研究综述[J].电子测量与仪器学报,2015,29(05):638-647.
[4] 王成元,夏加宽,孙宜标.现代电机控制技术[M].北京:机械工业出版社,2009.
[5] Judit Ba?os and García Sonny Quillo, Predictive Controller for PMSM Drive, pages 12~13,2013
[6] 陈宝林.最优化理论与算法[M].清华大学出版社,2005.
猜你喜欢
科学家(2022年3期)2022-04-11
科技创新与应用(2020年15期)2020-05-21
电机与控制学报(2018年9期)2018-05-14
电机与控制学报(2018年9期)2018-05-14
魅力中国(2016年52期)2017-09-01
科学与财富(2017年9期)2017-06-09
中学生数理化·高二版(2016年5期)2016-05-14
计算技术与自动化(2014年1期)2014-12-12
科技经济市场(2014年10期)2014-11-27
少年文艺·少年读者文摘(2014年1期)2014-02-27
