基于GWO-BP神经网络补偿的SF6红外气体传感器
2020-02-19 02:31赵正杰赵勇毅孔春霞佘明熹常建华
激光与红外 2020年1期
赵正杰,赵勇毅,孔春霞,佘明熹,常建华,2,沈 婉
(1.南京信息工程大学江苏省大气环境与装备技术协同创新中心,江苏 南京 210044;2.南京信息工程大学江苏省气象探测与信息处理重点实验室,江苏 南京 210044)
1 引 言
六氟化硫(SF6)具备极高的耐电强度和良好的灭弧性能,因此被广泛用于电力系统中防止积碳和火花的产生,同时还被广泛用作金属冶炼制造工艺的防氧化剂[1]。然而SF6气体在遇到大电流开断时极易产生一些含硫的低氟化物,这些物质易于空气、水分进一步反应生成剧毒气体,从而损害人体呼吸系统[2]。因此为了保障居民人身安全及电力设备合理运转,研究SF6气体检测装置至关重要。
目前市场上已有诸多检测技术实现了对SF6气体浓度的检测,包括电化学技术、电击穿技术等[3-4],这些检测技术有其优势,也存在不足。本文利用红外光谱吸收研制了一种精度高、性能稳定的SF6气体浓度检测装置,结合SF6的分子结构及红外光谱图选定特征吸收峰,通过探测器将红外光强度削减大小映射到电压浓度上,从而测得SF6气体的浓度值。然而,在SF6气体浓度的实际检测中,环境的差异性容易影响SF6气体浓度检测装置的检测精度。目前为消除环境变化对传感器的影响,常用的有两种办法,一是硬件补偿法,通过外置恒温恒压器,保证SF6气体浓度检测装置正常工作,但该方法增加了装置体积及制造成本;二是经验公式法,通过大量的数据计算拟合出各类环境差异所造成的浓度偏移,得出浓度值与环境变量间的函数关系,但该方法不具备普适性且工作量繁杂[5-6]。
本设计采用的是软件算法补偿,利用灰狼优化BP神经网络的算法(GWO-BP)对SF6气体浓度检测装置进行气压和温度补偿。利用实测数据及预测值间的绝对误差,证明了GWO-BP神经网络算法能够一定程度上消除因检测环境温度改变而导致的检测偏差,提高SF6气体浓度检测器的检测精度。
2 传感器的系统设计
2.1 非分光红外差分检测原理
根据红外光谱理论,当气体分子的振动频率与红外光中某频率相同,该频率的光能量被气体分子吸收。在一定波长范围内,气体对特定波长红外光具有吸收作用,呈线性关系并遵守朗伯-比尔(Lambert-Beer)定律[7],其表达式为:
Iout=Iin·e-kcl
(1)
式中,Iin表示光入射时的强度;Iout表示红外光经待测气体吸收后射出时的强度;k表示气体对相应波长红外光的吸收系数;c表示待测气体的浓度;l表示穿过气体部分的红外光的光程长度[8]。
测量中,待测气体对测量通道的红外光具有强吸收作用,而对于引入的参比通道红外光无吸收作用。根据公式(1),可得出测量通道输出光强为:
Iout(mea)=Iin(mea)exp[-k(mea)CL]
(2)
参比通道的输出光强为:
Iout(ref)=Iin(ref)exp[-k(ref)CL]
(3)
在实验中,测量通道和参比通道的光路由同一光源发出,则初始光强几乎相等,即Iin(mea)≈Iin(ref)。将公式(3)、(4)两式相除,整理后,可得如下数学模型:
(4)
可见,差分检测技术能够得到待测气体浓度,并在一定程度上消除光源抖动、光学器件污染等外界因素的影响,提高传感器的检测精度[9]。
2.2 传感器的光路设计
SF6气体对10.55 μm的红外光具有强吸收作用,而对4 μm的红外光几乎无吸收。因此本文选用10.55 μm作为测量通道的红外光波长,选用4 μm作为参比通道的红外光波长,设计了单光源双波长的光路结构。
气体检测模型如图1所示,采用方波调制光,将光路的一端放置红外光源,另一端放置两个对称的探测器。探测器A前端设置有10.55 μm的测量滤光片;探测器B前端设置有4 μm参比滤光片。在同一光学系统中,参比通道的引入可减少光源抖动、气室内壁粗糙等引起的测量误差。

图1 气体检测模型示意图
2.3 传感器的结构设计
如图2所示,本设计采用直射式采样气室。为减少红外光的损耗,需保证探测器和红外光源都位于气室内腔的中心线上。为满足本文对于环境温度与气压的补偿要求,在气室的上方放置温度与气压传感器。

图2 气室结构设计图
直射式气室的内腔结构简单,便于设计与安装。另外本文利用SolidWorks建立三维模型,采用先进的3D打印技术打印成型,打印材料选用类ABS树脂材料,该材料具价格便宜、表面光滑且抗变形等优点。
3 补偿算法
3.1 GWO算法
GWO灰狼优化算法是模拟灰狼种群制度以及捕食行为所提出的一种新型智能优化算法[10]。通过模拟狼群的狩猎过程来实现最优化目的,狼群由5~12头狼组成,其中按照适应度值可分为4个等级,在捕食过程中,α、β、δ狼不断改变位置进行猎物追捕,剩余灰狼η追随前三者,最优化的解便是猎物的具体位置。由于灰狼位置的不确定性,将每只灰狼与猎物的距离表示为:
D(t)=|C·p(t)-X(t)|
(5)
其中,t代表递增的迭代次数;p(t)和X(t)分别表示第t代时猎物以及灰狼所处的位置。C=2r1,r1是处于[0,1]的随机数。随机初始化每匹灰狼的位置Xα(0),Xβ(0),Xδ(0),Xη(0)。更新灰狼位置。
(6)
其中,r2是处于[0,1]的随机数;a(t)是收敛因子;max代表的是自定义最大迭代次数。针对三只头狼,有以下数学描述:
(7)
根据式(9),定义下一代η狼的位置:
(8)
3.2 BP神经网络
BP神经网络是一种基于误差后向传播的多层前馈神经网络,具有很强的映射能力、泛化能力[11]。BP神经网络通过信号前向传播、误差反向传播两个阶段反复迭代,不断调整神经网络内部的权值和阈值,使误差梯度下降,直到到达训练次数或误差小于期望值为止。
BP神经网络结构主要包含三层:输入层、隐含层和输出层,如图3所示。在实际网络构建过程中,首先进行数据采集,将采集的各项数据进行归一化处理,将处理后的数据作为网络的输入向量,将SF6气体的浓度值作为输出向量。

图3 误差后向神经网络模型
3.3 混合GWO-BP神经网络
BP神经网络收敛速度慢,而且容易陷入局部极小值,因此本文利用GWO算法加强全局搜索能力。如图4所示,将灰狼的位置作为BP神经网络的权值、阈值,灰狼算法进行多次迭代,灰狼持续对猎物位置进行判断与更新,即不断更新BP神经网络的阈值、权值,最终计算全局最优结果。
具体步骤如下:
步骤1:选择合适的训练样本。本文中采用测量通道与参比通道的输出电压比值、气体浓度数据及温度、所对应的气压、温度值作为训练样本。
步骤2:BP神经网络模型的构建。输入层的个数为n,输出层的个数为m,隐含层神经元节点个数q,计算公式如下:
(9)
由于a是1到10内的任意常数,所以经过多次试验可得当a为5时,其收敛速度和拟合精度相比于a取其他数值时最为适合。

图4 GWO-BP混合神经网络流程图
步骤3:初始化GWO优化算法。初始化当前适应度最优的位置Xα,Xβ及Xδ。
步骤4:计算个体的适应度值。将BP神经网络的权值和阈值设定为GWO算法所要求解的对象,采用BP神经网络的各个神经元节点的误差总和作为GWO优化算法衡量个体位置优劣的适应度函数,得出当前最佳适应度值的位置。
步骤5:判断迭代次数。当迭代次数到达上限时,GWO优化算法结束,最终得到BP神经网络的最佳初始权值及阈值。
步骤6:BP神经网络根据GWO优化算法优化后的权值及阈值进行网络训练及性能评估,最终得到预测结果。
在构建网络的过程中,利用matlab仿真软件不断对GWO优化算法中个体位置进行更新,直到其迭代次数达到所设定的数值。如图所示,图5(a)为在温度补偿的过程中,GWO优化算法在迭代次数达到500次之前的最佳适应度值,当迭代次数为500次时,适应度值接近零点,即GWO优化算法求解出BP神经网络的最佳初始权值及阈值。同样的,气压补偿过程中的迭代次数与适应度值关系如图5(b)所示,即最优迭代次数为300次。

图5 迭代次数与适应度值关系图
4 实验结果与讨论
4.1 数据采集
实验中,采用浓度为2000 ppm的SF6以及99.9 %的高纯度氮气(N2)进行配比。配比时,在标准大气压下进行,气体通过流量计进入配气室,进行均匀混合后输入至气体传感器气室中。初始浓度为0 ppm,接着,通过调节流量计流速,可以获得实验所需的600 ppm、1200 ppm以及1800 ppm的SF6气体。然后,将气体传感器放置于温度实验箱与压力实验箱中进行数据采集。
温度补偿数据采集的过程中,将实验箱内温度依次调节至10,15,20,25,30,35,40 ℃。在各个温度点,将不同浓度的气体通入至气体传感器气室中,等待3分钟,记录下传感器测量通道与参比通道的电压值。各温度与浓度下,分别进行10次的数据采集,取平均值作为最终的采集数据。
气压补偿数据采集的过程中,将实验箱内气压调节至100,105,110,115,120 kPa。在各个气压点,将不同浓度的气体输入至传感器中,等待3 min,记录数据。各气压与浓度下,分别进行10次的数据采集,取平均值作为最终的采集数据。
4.2 温度补偿分析
温度补偿的过程中,首先处理采集到的21组数据,将传感器的测量通道和参比通道输出电压的比值、与之对应的温度值作为GWO-BP神经网络的输入向量,将SF6气体标准浓度作为输出向量,构建了一个双输入单输出的神经网络结构。经过GWO-BP神经网络预测模型处理后,输出向量即为温度补偿后的浓度值。
如图6所示,为温度补偿前后的气体浓度值曲线。对于600 ppm,1200 ppm以及1800 ppm三个温度点下采集到的数据分别采用经验公式法、GWO-BP神经网络进行了温度补偿,并与温度补偿前的数据对比。其中,第一组数据为未进行温度补偿的浓度值,当环境温度不断升高,浓度测量值偏移标准值逐渐增大。第二组数据为经验公式法进行的温度补偿,经验公式法进行补偿后,与未进行补偿相比较,浓度的偏移有适当减小,但是此方法适配性不佳、应用场合较为局限,在此不作为首选。第三组数据为经过GWO-BP神经网络补偿后的浓度数据,由图可见,补偿后的浓度偏移明显减小,各浓度的曲线斜率几乎为零。在整个温度变化的过程中,气体浓度的偏移不超过±15 ppm。对比后两组数据可知,使用GWO-BP神经网络在补偿中稳定性更好、效果更佳,可以获得更高的测量精度。
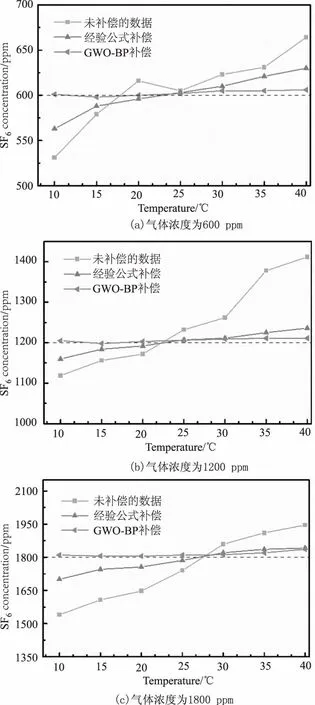
图6 环境温度补偿的结果分析图
4.3 气压补偿分析
在对气压进行补偿时,首先需要对采集到的15组数据进行预处理,以此作为训练GWO-BP神经网络的样本数据,构建一个气压补偿的神经网络。构建方式与温度补偿网络相同,结构皆为双输入单输出。后期,输入的各项数据经过GWO-BP神经网络处理后,输出即为气压补偿后的气体浓度值。
图7给出了三组不同浓度的SF6气体测量数值在气压补偿前后的浓度曲线。图7(a)所示为600 ppm的SF6气体在补偿前后的浓度曲线对比,图中第一组数据为温度补偿前的浓度,第二组数据为经BP神经网络补偿后的浓度,第三组数据为经GWO-BP神经网络补偿后的浓度。由图可知,未经过气压补偿时,在100 kPa处SF6气体浓度测量值与真实值相差较小,当气压增大的过程中,测量值的偏移逐渐增大。对比三组数据,当经过GWO-BP神经网络补偿后,气体浓度的测量值与真实值偏移明显减小,气体浓度的偏移不超过±15 ppm。相较于BP神经网络的补偿,GWO-BP神经网络的补偿在整个浓度范围内精确度更高,效果更佳。对于图7(b)、图7(c)可得到如图7(a)相同的结论。



图7 环境气压补偿的结果分析图
本文在数据的采集中,对于温度和气压的补偿,分别采集21、15组数据作为样本,构建了补偿神经网络。经补偿后的气体浓度受到环境温度、气压的影响明显减小,补偿结果较好,有效地提高了传感器的测量精度。
5 结 论
本文针对SF6气体传感器测量精度易受温度、气压影响的问题,采取GWO-BP神经网络对其进行补偿。并利用GWO算法具有收敛速度快、全局搜索能力强且不易陷入局部最优的特点,来优化BP神经网络收敛速度慢且易陷入局部最优的问题,两者结合得出补偿算法。相较于传统的硬件电路补偿法,该补偿方法稳定性更好、效果更佳,并且有利于传感器的小型化。实验结果表明,基于该补偿方法补偿后的气体浓度测量数据在0~2000 ppm范围内误差范围为±15 ppm,满量程误差为0.75 %FS,说明使用该方法能对气体检测过程中的温度与气压进行有效补偿,很大程度上减小温度、气压对气体传感器测量精度的影响。
猜你喜欢
红外技术(2022年11期)2022-11-25
中国典型病例大全(2022年7期)2022-04-22
幼儿画刊(2021年5期)2021-12-02
小学阅读指南·低年级版(2021年3期)2021-03-19
纺织科学研究(2021年1期)2021-03-19
装备制造技术(2020年12期)2020-05-22
模具制造(2019年4期)2019-06-24
小太阳画报(2019年1期)2019-06-11
数学大王·低年级(2018年5期)2018-11-01
快乐作文·低年级(2017年3期)2017-03-25